Module with subroutines for system-level assembly. More...
Functions/Subroutines | |
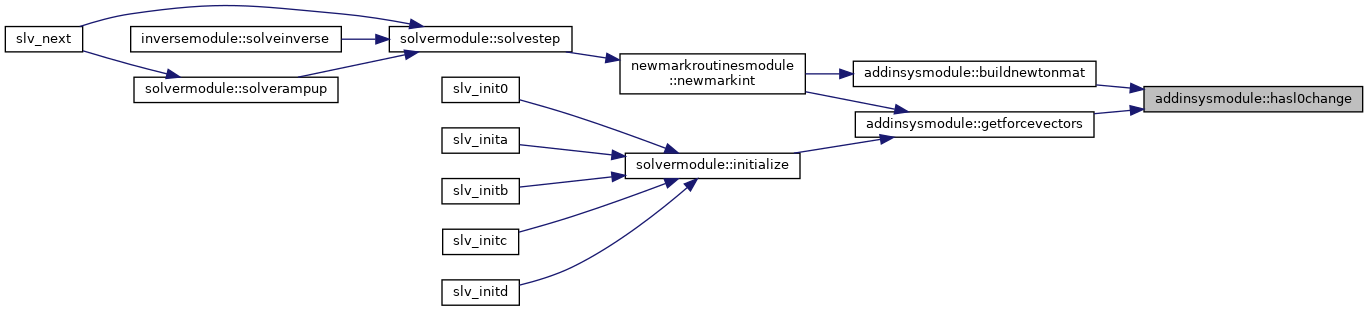
| logical function, private | hasl0change (spring) |
| Returns .true. if spring has a stress-free length change. More... | |
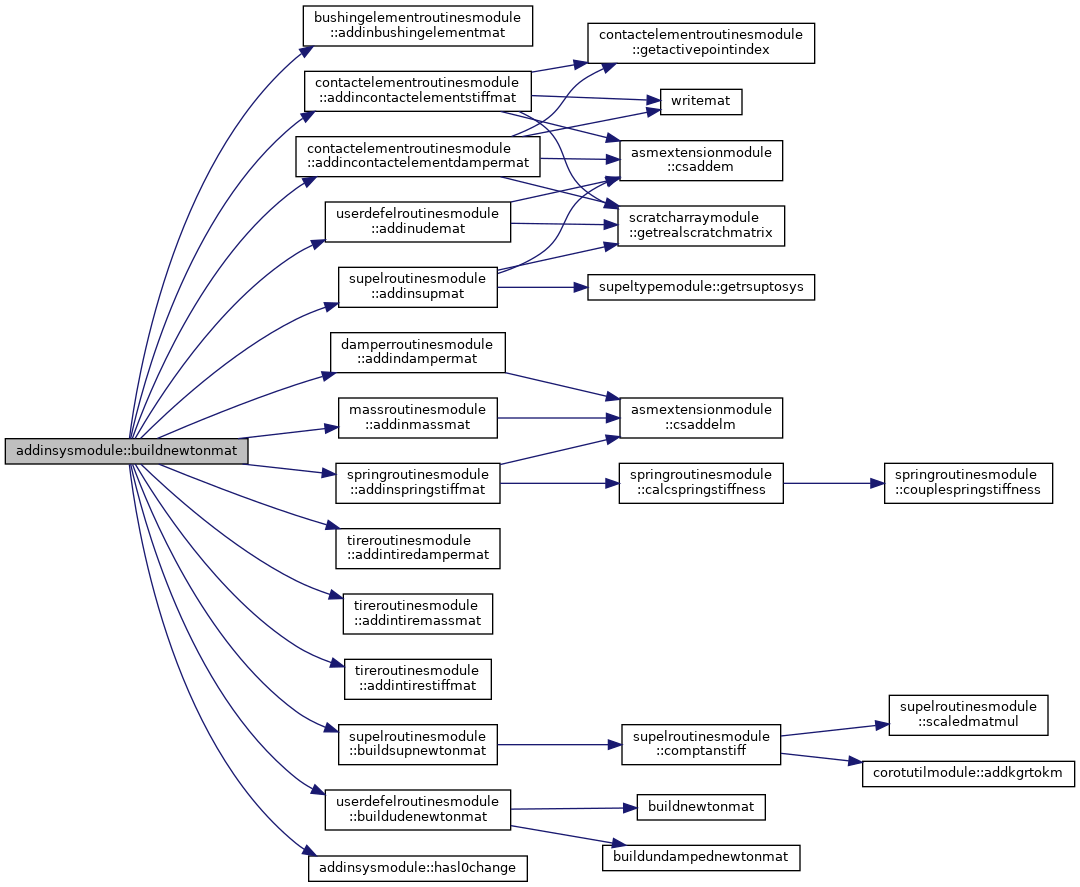
| subroutine | buildnewtonmat (Nmat, scaleM, scaleC, scaleK, mech, sam, iter, stressStiffUpdateSkip, globalStressStiffIsOn, alpha2, ierr, Rhs) |
| Builds the system Newton matrix. More... | |
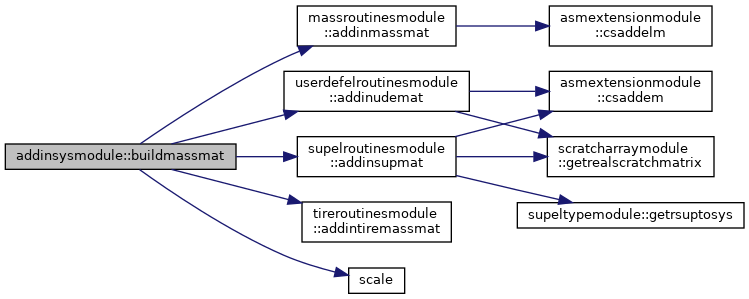
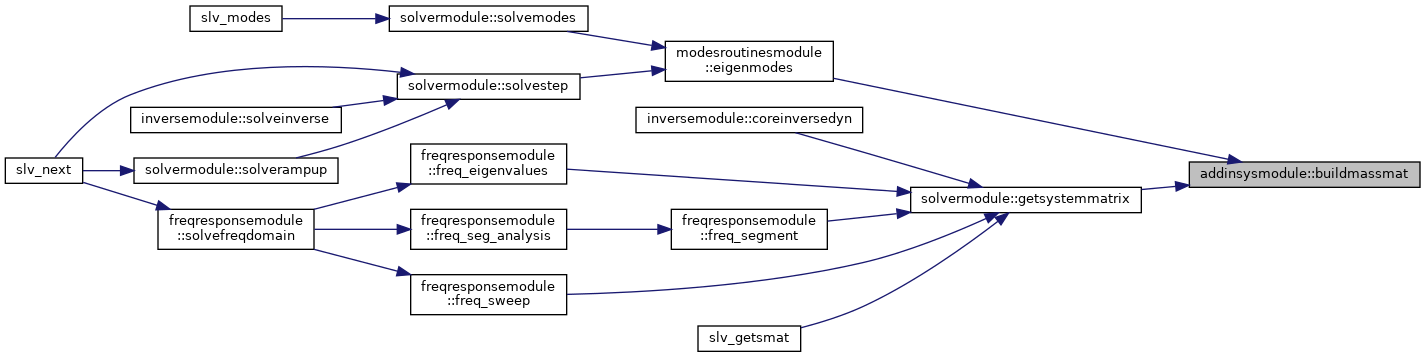
| subroutine | buildmassmat (Mmat, mech, sam, ierr) |
| Builds the system mass matrix. More... | |
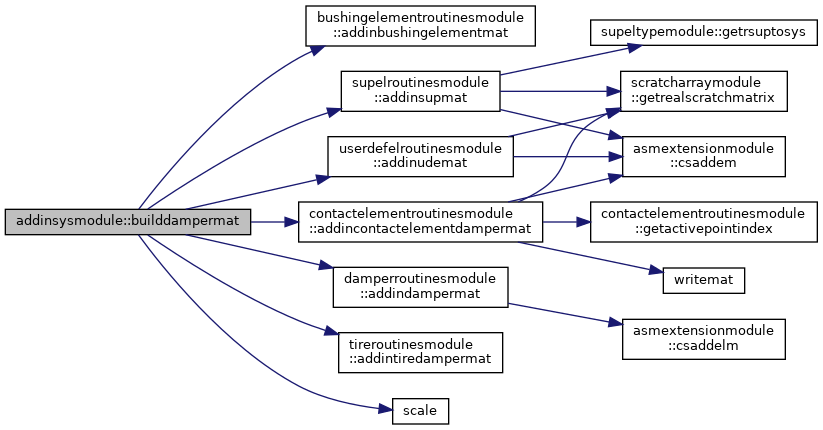
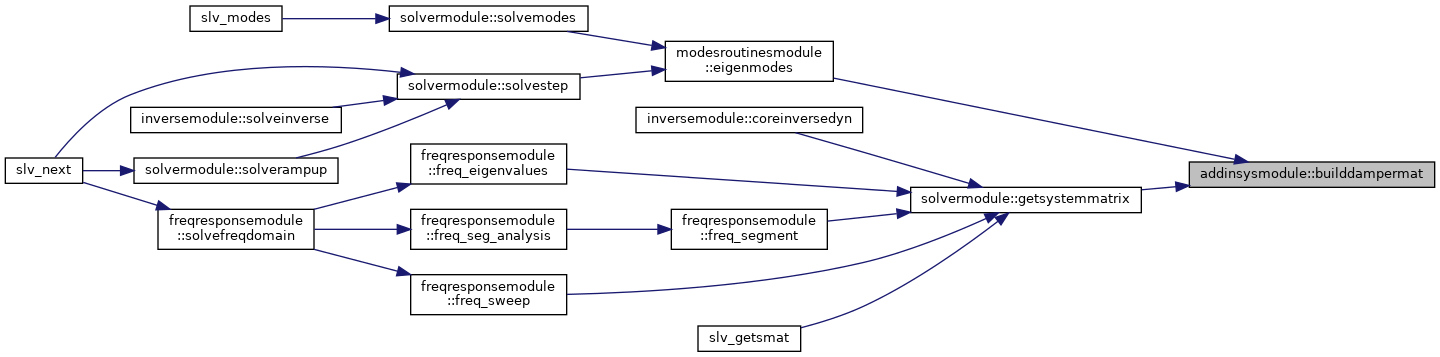
| subroutine | builddampermat (Cmat, mech, sam, ierr) |
| Builds the system damping matrix. More... | |
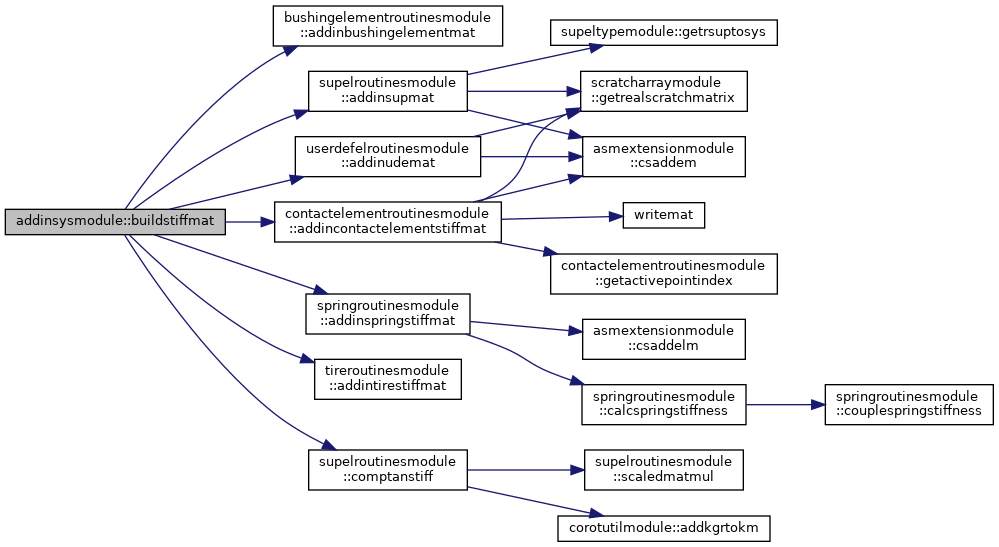
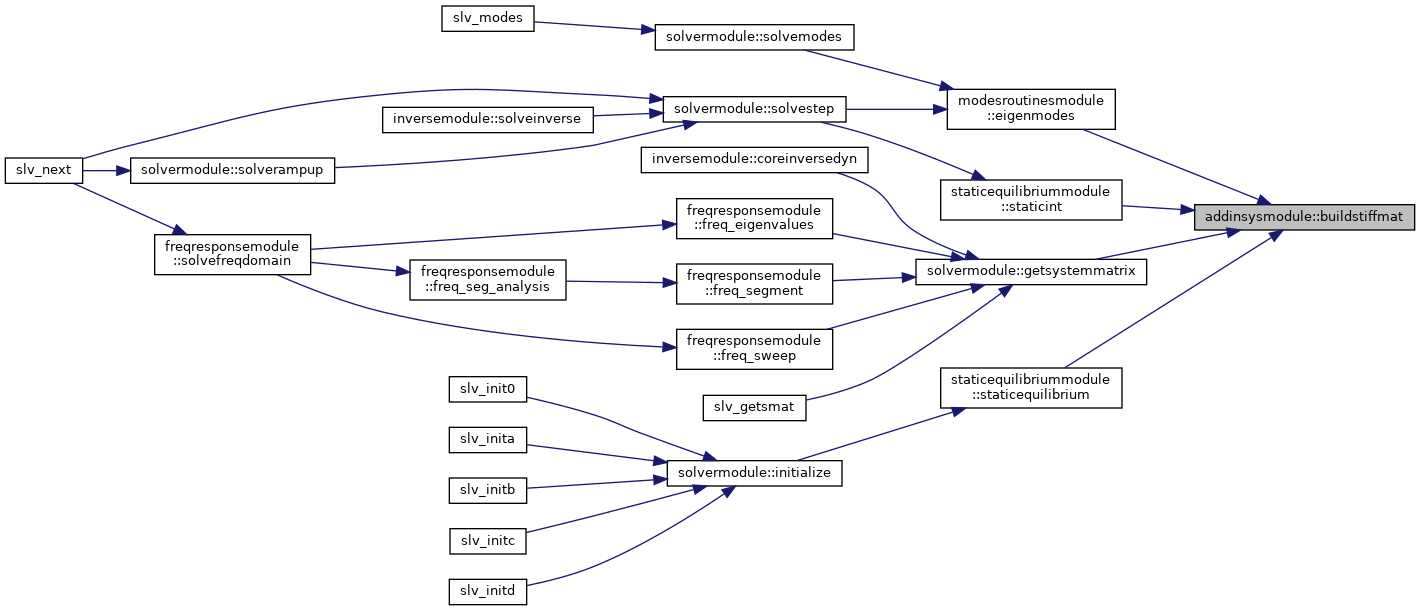
| subroutine | buildstiffmat (Kmat, mech, sam, iter, globalStressStiffIsOn, stressStiffUpdateSkip, ierr, Rhs) |
| Builds the system stiffness matrix. More... | |
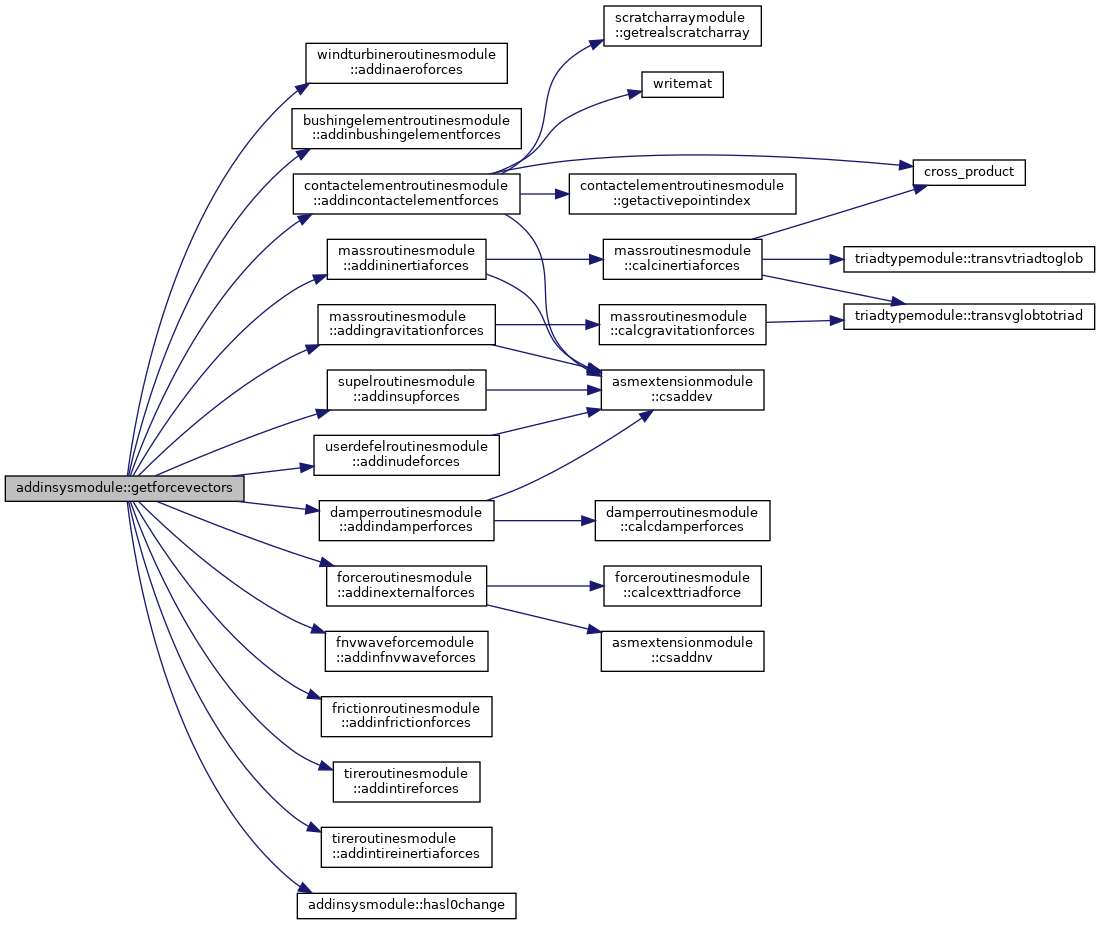
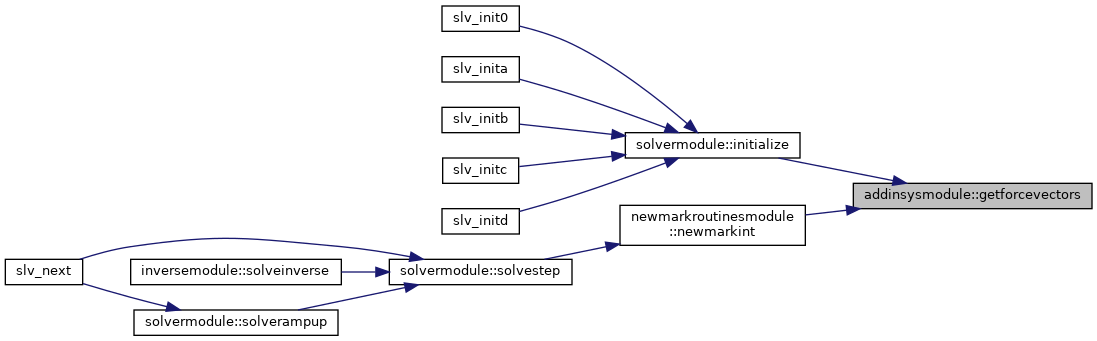
| subroutine | getforcevectors (FSk, FDk, FIk, Qk, RFk, sam, mech, istep, alpha2, ierr) |
| Builds the system force vectors. More... | |
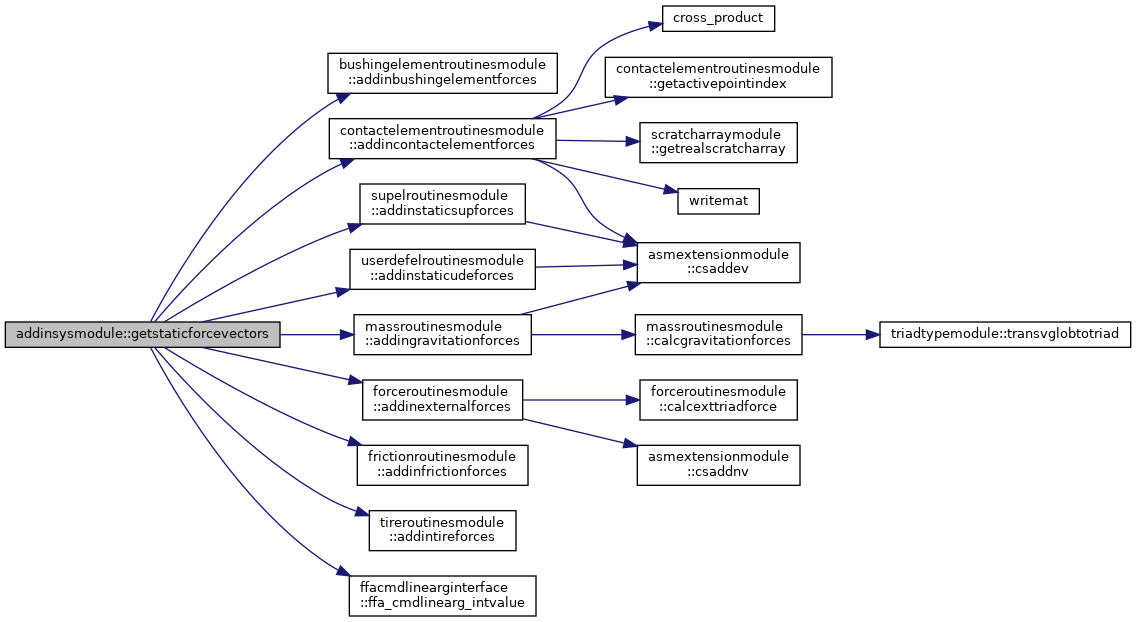
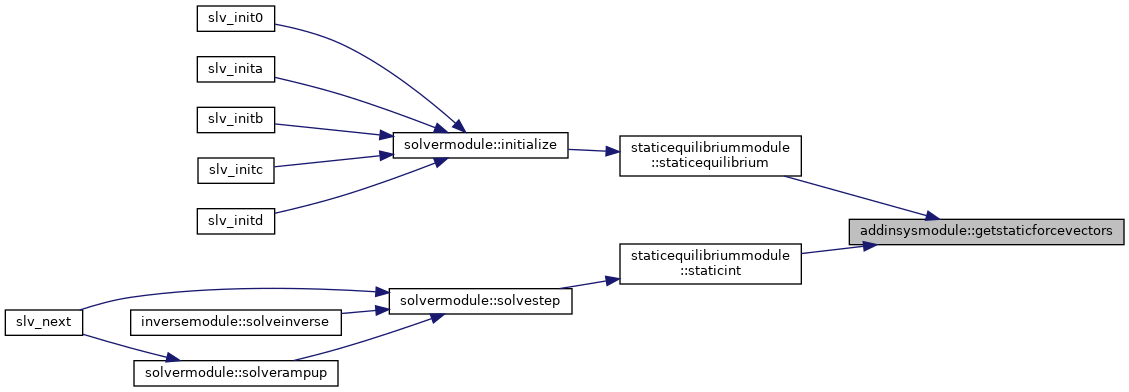
| subroutine | getstaticforcevectors (FSk, Qk, RFk, sam, mech, ierr) |
| Builds the quasti-static system force vectors. More... | |
Detailed Description
Module with subroutines for system-level assembly.
This module contains subroutines for assembling the system left-hand-side matrices and associated right-hand-side force vectors of the linearized equation system.
Function/Subroutine Documentation
◆ builddampermat()
| subroutine addinsysmodule::builddampermat | ( | type(sysmatrixtype), intent(inout) | Cmat, |
| type(mechanismtype), intent(in) | mech, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(out) | ierr | ||
| ) |
Builds the system damping matrix.
- Parameters
-
Cmat The system damping matrix [in] mech Mechanism components of the model [in] sam Data for managing system matrix assembly [out] ierr Error flag
- Date
- Jul 2002
◆ buildmassmat()
| subroutine addinsysmodule::buildmassmat | ( | type(sysmatrixtype), intent(inout) | Mmat, |
| type(mechanismtype), intent(in) | mech, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(out) | ierr | ||
| ) |
Builds the system mass matrix.
- Parameters
-
Mmat The system mass matrix [in] mech Mechanism components of the model [in] sam Data for managing system matrix assembly [out] ierr Error flag
- Date
- Aug 1999
- Date
- Jul 2002
◆ buildnewtonmat()
| subroutine addinsysmodule::buildnewtonmat | ( | type(sysmatrixtype), intent(inout) | Nmat, |
| real(dp), intent(in) | scaleM, | ||
| real(dp), intent(in) | scaleC, | ||
| real(dp), intent(in) | scaleK, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(in) | iter, | ||
| integer, intent(in) | stressStiffUpdateSkip, | ||
| logical, intent(in) | globalStressStiffIsOn, | ||
| real(dp), intent(in) | alpha2, | ||
| integer, intent(out) | ierr, | ||
| real(dp), dimension(:), intent(inout), optional | Rhs | ||
| ) |
Builds the system Newton matrix.
- Parameters
-
Nmat The system Newton matrix [in] scaleM Scaling factor for the system mass matrix [in] scaleC Scaling factor for the system damping matrix [in] scaleK Scaling factor for the system stiffness matrix mech Mechanism components of the model [in] sam Data for managing system matrix assembly [in] iter Iteration counter [in] stressStiffUpdateSkip Number of initial iterations without stress stiffening in each time step [in] globalStressStiffIsOn Global stress stiffening flag [in] alpha2 Stiffness-proportional damping factor for axial springs [out] ierr Error flag Rhs Right-hand-side force vector
The Newton matrix is a linear combination of the mass-, damping- and stiffness matrices, Nmat = scaleM*M + scaleC*C + scaleK*K. If Rhs is provided, contributions due to prescribed motions, if any, will be added.
- Date
- Feb 1999
- Date
- Des 2000
- Date
- Jul 2002

◆ buildstiffmat()
| subroutine addinsysmodule::buildstiffmat | ( | type(sysmatrixtype), intent(inout) | Kmat, |
| type(mechanismtype), intent(inout) | mech, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(in) | iter, | ||
| logical, intent(in) | globalStressStiffIsOn, | ||
| integer, intent(in) | stressStiffUpdateSkip, | ||
| integer, intent(out) | ierr, | ||
| real(dp), dimension(:), intent(inout), optional | Rhs | ||
| ) |
Builds the system stiffness matrix.
- Parameters
-
Kmat The system stiffness matrix mech Mechanism components of the model [in] sam Data for managing system matrix assembly [in] iter Iteration counter (< 0 for eigenvalue analysis) [in] globalStressStiffIsOn Global stress stiffening flag [in] stressStiffUpdateSkip Number of initial iterations without stress stiffening in each time step [out] ierr Error flag Rhs Right-hand-side force vector
If Rhs is provided, contributions due to prescribed motions, if any, will be added.
- Date
- Aug 1999
- Date
- Jul 2002
◆ getforcevectors()
| subroutine addinsysmodule::getforcevectors | ( | real(dp), dimension(:), intent(out) | FSk, |
| real(dp), dimension(:), intent(out) | FDk, | ||
| real(dp), dimension(:), intent(out) | FIk, | ||
| real(dp), dimension(:), intent(out) | Qk, | ||
| real(dp), dimension(:), intent(out) | RFk, | ||
| type(samtype), intent(in) | sam, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| integer(i8), intent(in) | istep, | ||
| real(dp), intent(in) | alpha2, | ||
| integer, intent(out) | ierr | ||
| ) |
Builds the system force vectors.
- Parameters
-
[out] FSk Internal stiffness forces [out] FDk Internal damping forces [out] FIk Internal inertia forces [out] Qk External forces [out] RFk Reaction forces [in] sam Data for managing system matrix assembly mech Mechanism components of the model [in] istep Time increment counter [in] alpha2 Stiffness-proportional damping factor for axial springs [out] ierr Error flag
this subroutine puts forces from all mechanism components into the associated system force vectors.
- Date
- 19 Jan 1989
- Date
- 1999
- Date
- 2001
- Date
- Jun 2002
◆ getstaticforcevectors()
| subroutine addinsysmodule::getstaticforcevectors | ( | real(dp), dimension(:), intent(out) | FSk, |
| real(dp), dimension(:), intent(out) | Qk, | ||
| real(dp), dimension(:), intent(out) | RFk, | ||
| type(samtype), intent(in) | sam, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| integer, intent(out) | ierr | ||
| ) |
Builds the quasti-static system force vectors.
- Parameters
-
[out] FSk Internal stiffness forces [out] Qk External forces [out] RFk Reaction forces [in] sam Data for managing system matrix assembly mech Mechanism components of the model [out] ierr Error flag
this subroutine puts static forces from all mechanism components into the associated system force vectors.
- Date
- Jun 2002
◆ hasl0change()
|
private |
Returns .true. if spring has a stress-free length change.
- Parameters
-
[in] spring Spring element to check for stress-free length change
The stiffness-proportional damping value is then set to a large negative value to deactivate such damping for that spring. A warning is issued if this happens to suggest a model change.
- Date
- 9 Mar 2026