Module with subroutines for contact element calculations. More...
Functions/Subroutines | |
| integer function | getactivepointindex (cElem, cpIndex) |
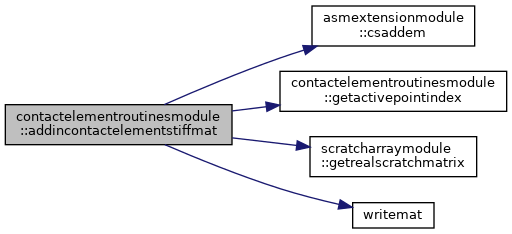
| subroutine, public | addincontactelementstiffmat (includeStressStiff, scaleK, Nmat, cElem, sam, ierr, Rhs) |
| Calculates the stiffness matrix for each contact spring. More... | |
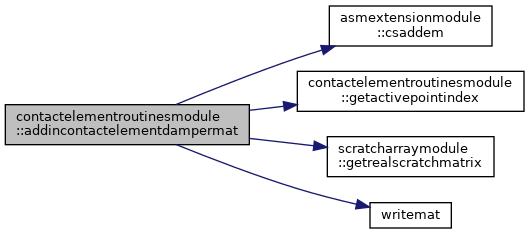
| subroutine, public | addincontactelementdampermat (includeStressStiff, scaleC, scaleK, Nmat, cElem, sam, ierr, Rhs) |
| Calculates the damping matrix for each contact damper. More... | |
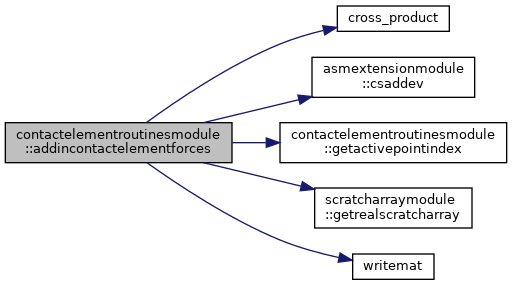
| subroutine, public | addincontactelementforces (F, RF, cElem, sam, ierr, addSprings, addDampers, addFriction) |
| Calculates system force vector terms from a contact element. More... | |
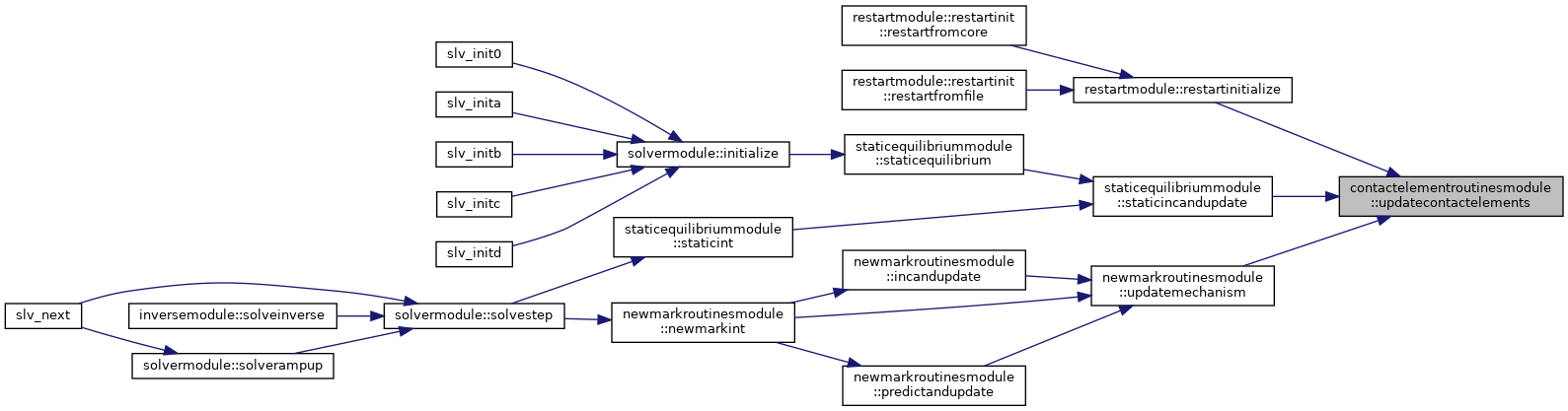
| subroutine, public | updatecontactelements (cElems, timeStep, ierr) |
| Updates all contact elements. More... | |
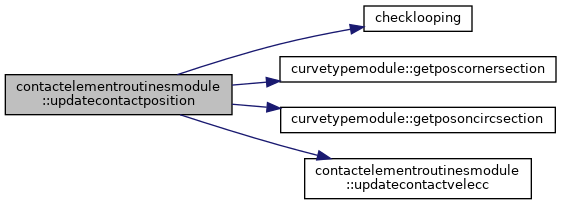
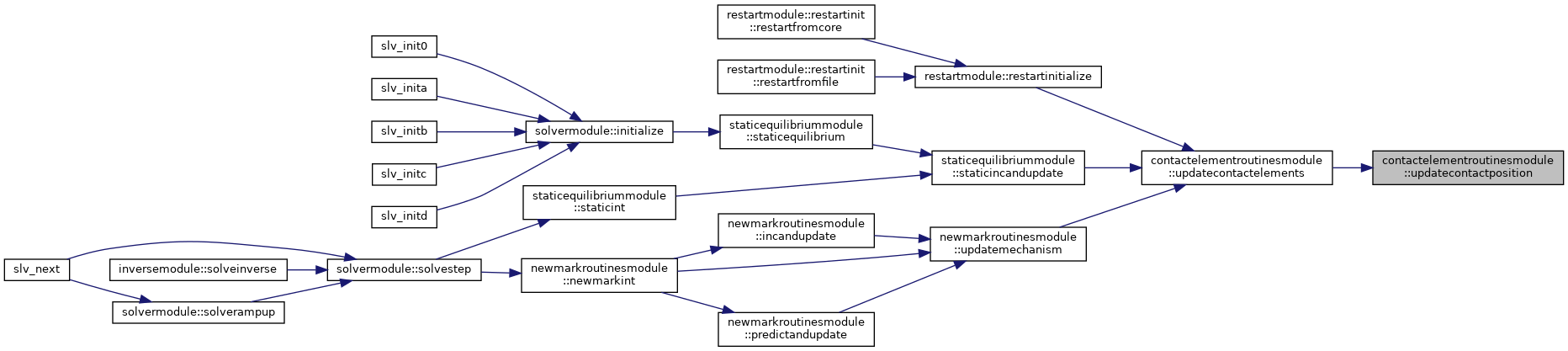
| subroutine | updatecontactposition (cElem, cSurf, lpu) |
| Updates the local coordinates of the contact element follower. More... | |
| subroutine | updatecontactvelecc (cElem, CP1, CP2) |
| Updates the contact point velocities and eccentricty vectors. More... | |
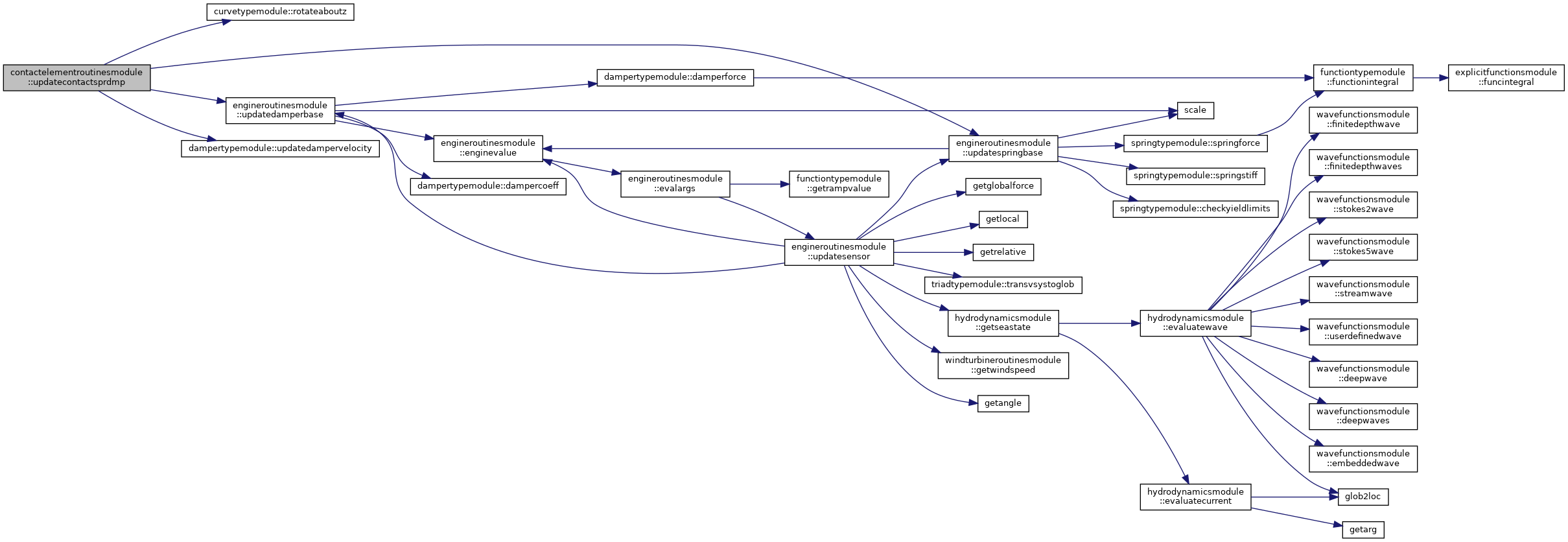
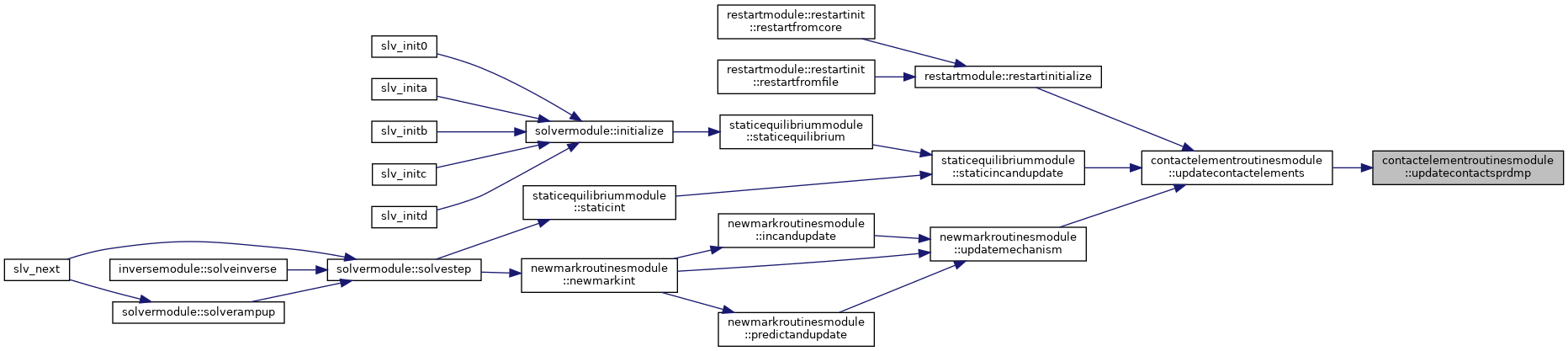
| subroutine | updatecontactsprdmp (cElem, timeStep, ierr) |
| Updates the contact springs and dampers. More... | |
Variables | |
| real(dp), parameter | epszero_p = 1.0e-15_dp |
| Zero tolerance. More... | |
Detailed Description
Module with subroutines for contact element calculations.
Function/Subroutine Documentation
◆ addincontactelementdampermat()
| subroutine, public contactelementroutinesmodule::addincontactelementdampermat | ( | logical, intent(in) | includeStressStiff, |
| real(dp), intent(in) | scaleC, | ||
| real(dp), intent(in) | scaleK, | ||
| type(sysmatrixtype), intent(inout) | Nmat, | ||
| type(contactelementtype), intent(in) | cElem, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(out) | ierr, | ||
| real(dp), dimension(:), intent(inout), optional | Rhs | ||
| ) |
Calculates the damping matrix for each contact damper.
- Parameters
-
[in] includeStressStiff If .true., geometric stiffness is included [in] scaleC Damping scaling factor [in] scaleK Stiffness scaling factor Nmat System matrix to add damping contributions into [in] cElem The contact element to calculate damping matrix for [in] sam Data for managing system matrix assembly [out] ierr Error flag Rhs System right-hand-side vector associated with Nmat
The element damping matrix are added into the system Newton matrix, multiplied by the factor scaleC.
- Date
- Oct 2001
- Date
- Sep 2005

◆ addincontactelementforces()
| subroutine, public contactelementroutinesmodule::addincontactelementforces | ( | real(dp), dimension(:), intent(inout) | F, |
| real(dp), dimension(:), intent(inout) | RF, | ||
| type(contactelementtype), intent(in) | cElem, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(inout) | ierr, | ||
| logical, intent(in), optional | addSprings, | ||
| logical, intent(in), optional | addDampers, | ||
| logical, intent(in), optional | addFriction | ||
| ) |
Calculates system force vector terms from a contact element.
- Parameters
-
F System right-hand-side vector RF Reaction for vector [in] cElem The contact element to calculate forces for [in] sam Data for managing system matrix assembly [out] ierr Error flag [in] addSprings If .true., add forces from contact springs [in] addDampers If .true., add forces from contact dampers [in] addFriction If .true., add forces from contact friction
The force terms are added into the system vector F and the reaction force vectos RF.
- Date
- Oct 2001

◆ addincontactelementstiffmat()
| subroutine, public contactelementroutinesmodule::addincontactelementstiffmat | ( | logical, intent(in) | includeStressStiff, |
| real(dp), intent(in) | scaleK, | ||
| type(sysmatrixtype), intent(inout) | Nmat, | ||
| type(contactelementtype), intent(in) | cElem, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(out) | ierr, | ||
| real(dp), dimension(:), intent(inout), optional | Rhs | ||
| ) |
Calculates the stiffness matrix for each contact spring.
- Parameters
-
[in] includeStressStiff If .true., geometric stiffness is included [in] scaleK Stiffness scaling factor Nmat System matrix to add stiffness contributions into [in] cElem The contact element to calculate stiffness matrix for [in] sam Data for managing system matrix assembly [out] ierr Error flag Rhs System right-hand-side vector associated with Nmat
The element stiffness matrix is added into the system Newton matrix, multiplied by the factor scaleK.
- Date
- Oct 2001
- Date
- Sep 2005

◆ getactivepointindex()
|
private |
◆ updatecontactelements()
| subroutine, public contactelementroutinesmodule::updatecontactelements | ( | type(contactelementtype), dimension(:), intent(inout) | cElems, |
| real(dp), intent(in) | timeStep, | ||
| integer, intent(inout) | ierr | ||
| ) |
Updates all contact elements.
- Parameters
-
[in] cElems All contact elements of the model [in] timeStep Time increment size [out] ierr Error flag
- Date
- May 2002
◆ updatecontactposition()
| subroutine contactelementroutinesmodule::updatecontactposition | ( | type(contactelementtype), intent(inout) | cElem, |
| type(glidercurvetype), intent(inout) | cSurf, | ||
| integer, intent(in) | lpu | ||
| ) |
Updates the local coordinates of the contact element follower.
- Parameters
-
cElem The contact element to update contact position for cSurf Contact surface associated with cElem [in] lpu File unit number for res-file output
The local coordinates are updates with respect to the contact surface. Then the associated velocities are computed.
- Date
- Oct 2001
- Date
- Sep 2005
◆ updatecontactsprdmp()
| subroutine contactelementroutinesmodule::updatecontactsprdmp | ( | type(contactelementtype), intent(inout) | cElem, |
| real(dp), intent(in) | timeStep, | ||
| integer, intent(inout) | ierr | ||
| ) |
Updates the contact springs and dampers.
- Parameters
-
cElem The contact element to update [in] timeStep Time increment size ierr Error flag
- Date
- Oct 2001
- Date
- Sep 2005 / 2.0
◆ updatecontactvelecc()
|
private |
Updates the contact point velocities and eccentricty vectors.
- Parameters
-
cElem The contact element to update velocity and eccentricity for [in] CP1 First point of the glider curve segment [in] CP2 Second point of the glider curve segment
The contact point velocity is computed from the follower triad. The eccentricity vectors are computed from the glider triad positions.
- Date
- Oct 2001
- Date
- Sep 2005 / 2.0

Variable Documentation
◆ epszero_p
|
private |
Zero tolerance.