Module with data types representing control system object of a model. More...
Data Types | |
| type | ctrlprm |
| Data type representing a control input parameter. More... | |
| type | controltype |
| Data type representing the control system of a model. More... | |
| interface | writeobject |
| Standard routine for writing an object to file. More... | |
Functions/Subroutines | |
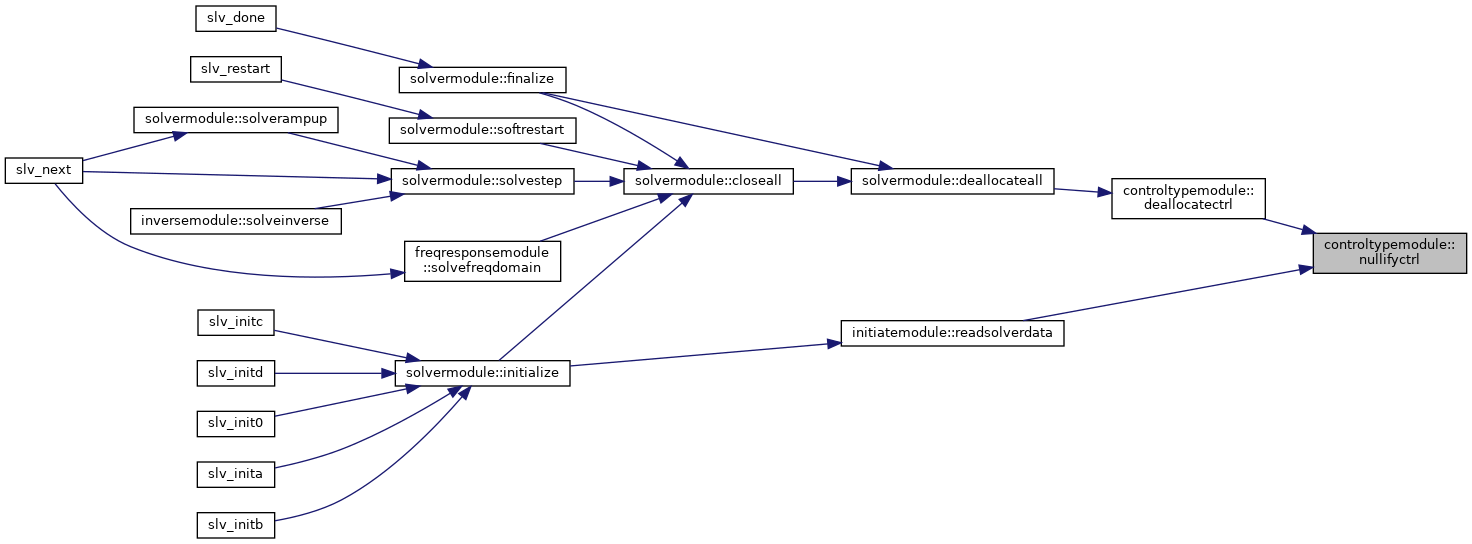
| subroutine, public | nullifyctrl (ctrl, deallocating) |
| Initializes the ControlType object. More... | |
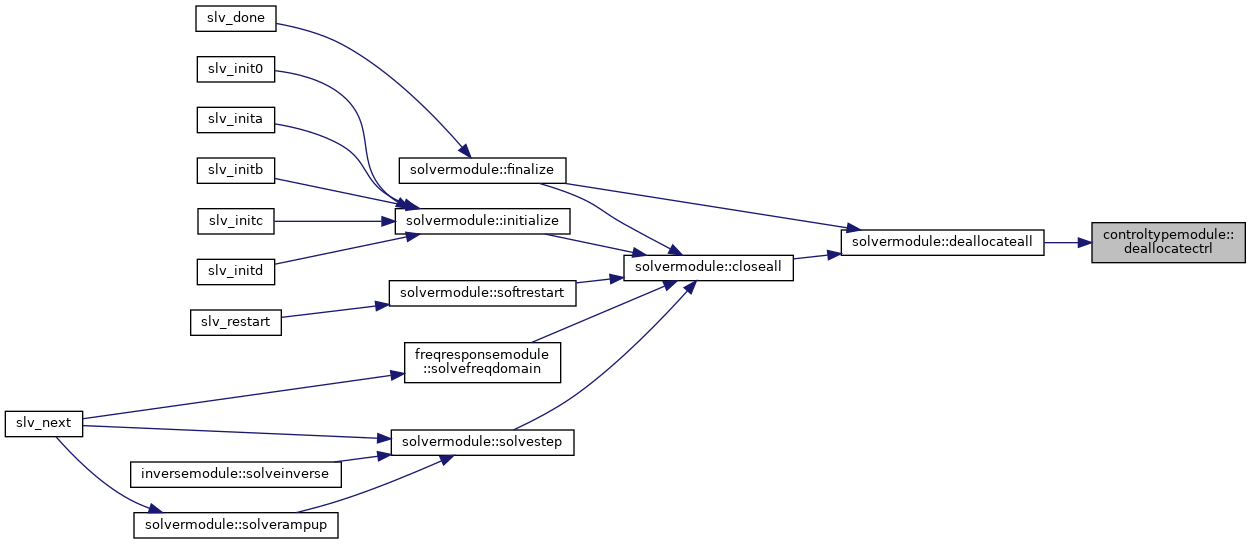
| subroutine, public | deallocatectrl (ctrl) |
| Deallocates the ControlType object. More... | |
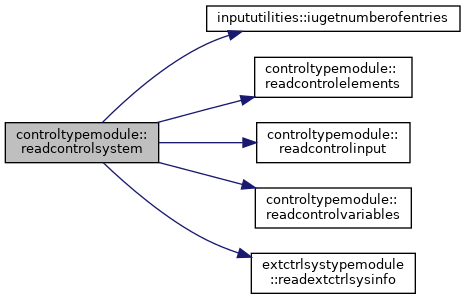
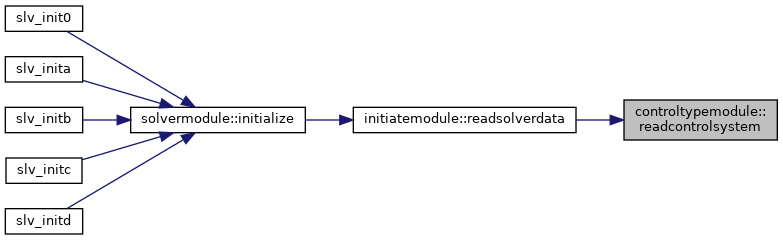
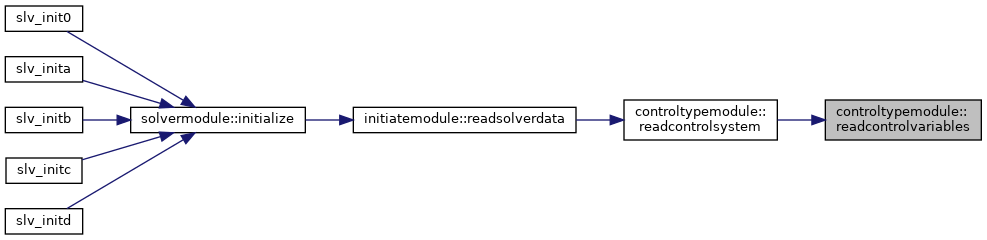
| subroutine, public | readcontrolsystem (infp, engines, sensors, ctrl, ierr) |
| Initializes the ControlType object with data from the input file. More... | |
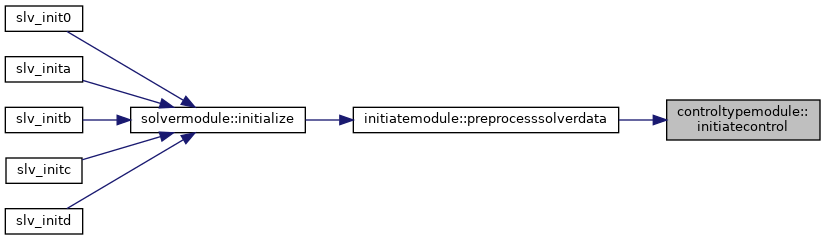
| subroutine, public | initiatecontrol (mpar, ctrl) |
| Initializes the SAM control array MPAR with control system data. More... | |
| subroutine | readcontrolinput (infp, engines, sensors, input, mstat, ierr) |
| Reads data for the control inputs from the solver input file. More... | |
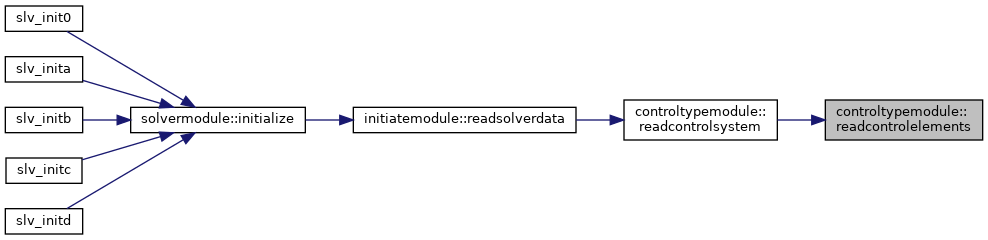
| subroutine | readcontrolelements (infp, nCEl, nDelay, mpmtop, mprpar, mmtop, rpar, iprint, lpu, ierr) |
| Reads data for the control elements from the solver input file. More... | |
| subroutine | readcontrolvariables (infp, mstat, vreg, vregId, mvar, iprint, lpu, ierr) |
| Reads status codes and initial conditions for the control variables. More... | |
| subroutine | writecontroltype (ctrl, io, complexity) |
| Standard routine for writing an object to io. More... | |
| logical function, public | hascontrolelements (ctrl) |
| Checks if control elements are present in the model. More... | |
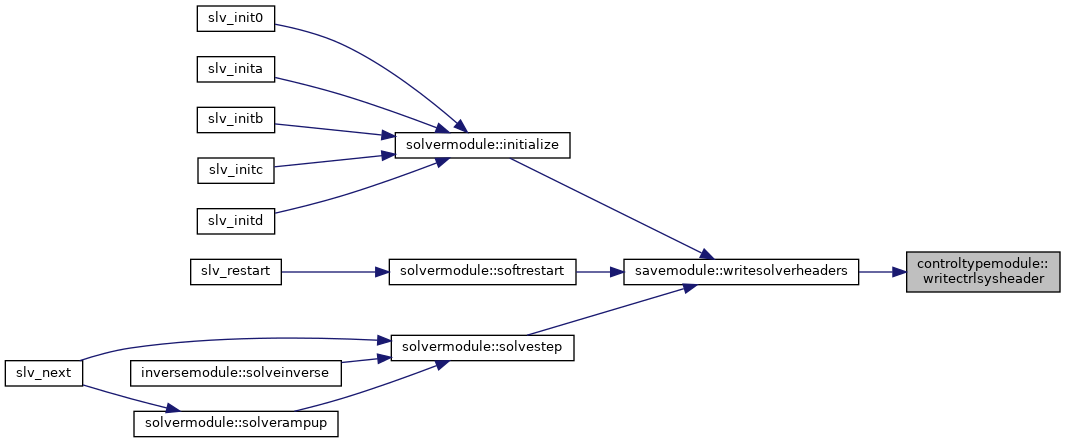
| subroutine, public | writectrlsysheader (ctrl, mechId, rdb) |
| Writes results database headers for the control system. More... | |
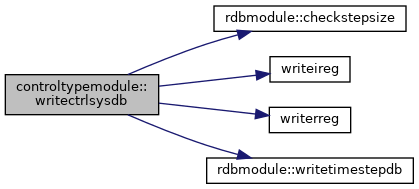
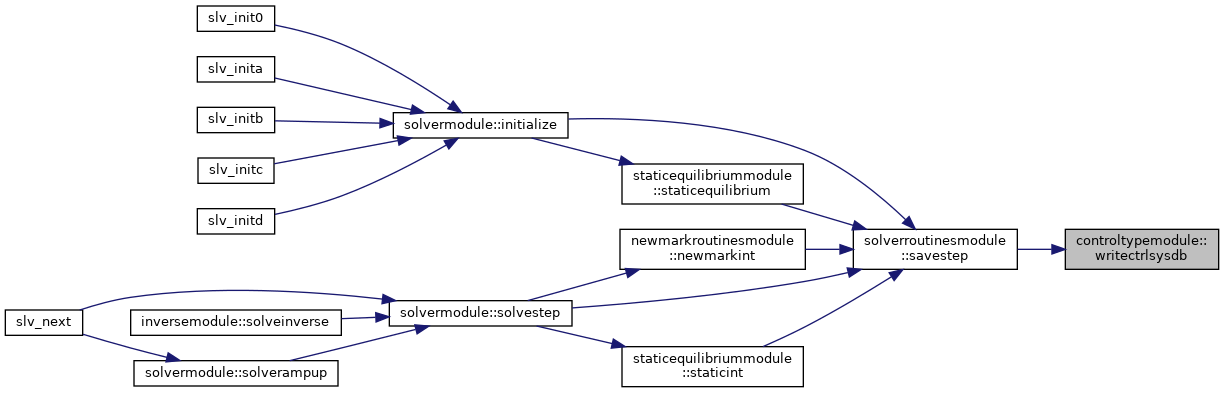
| subroutine, public | writectrlsysdb (rdb, ctrl, nStep, time, ierr) |
| Writes control system data to the results database. More... | |
Detailed Description
Module with data types representing control system object of a model.
The module also contains subroutines for initializing the control system from the input file, as well as general subroutines and functions for for accessing the control system data.
Function/Subroutine Documentation
◆ deallocatectrl()
| subroutine, public controltypemodule::deallocatectrl | ( | type(controltype), intent(inout) | ctrl | ) |
Deallocates the ControlType object.
- Parameters
-
ctrl Control system data
- Date
- 23 Jan 2017
◆ hascontrolelements()
| logical function, public controltypemodule::hascontrolelements | ( | type(controltype), intent(in) | ctrl | ) |
Checks if control elements are present in the model.
◆ initiatecontrol()
| subroutine, public controltypemodule::initiatecontrol | ( | integer, dimension(:), intent(inout) | mpar, |
| type(controltype), intent(in) | ctrl | ||
| ) |
Initializes the SAM control array MPAR with control system data.
- Parameters
-
mpar Matrix of parameters [in] ctrl Control system data
- Date
- Apr 2003
◆ nullifyctrl()
| subroutine, public controltypemodule::nullifyctrl | ( | type(controltype), intent(out) | ctrl, |
| logical, intent(in), optional | deallocating | ||
| ) |
Initializes the ControlType object.
- Parameters
-
[out] ctrl Control system data [in] deallocating If .true., the pointers are nullified
- Date
- 4 Jul 2004
◆ readcontrolelements()
| subroutine controltypemodule::readcontrolelements | ( | integer, intent(in) | infp, |
| integer, intent(in) | nCEl, | ||
| integer, intent(out) | nDelay, | ||
| integer, dimension(:), intent(out) | mpmtop, | ||
| integer, dimension(:), intent(out) | mprpar, | ||
| integer, dimension(:), intent(out) | mmtop, | ||
| real(dp), dimension(:), intent(out) | rpar, | ||
| integer, intent(in) | iprint, | ||
| integer, intent(in) | lpu, | ||
| integer, intent(out) | ierr | ||
| ) |
Reads data for the control elements from the solver input file.
- Parameters
-
[in] infp File unit number for the solver input file [in] nCEl Total number of control elements in the model [out] nDelay Number of delay elements in the model [out] mpmtop Matrix of pointers to topology vectors [out] mprpar Matrix of pointers to real data for the control elements [out] mmtop Topology vectors for the control elements [out] rpar Real data for the control elements [in] iprint Print switch; the higher value the more print is produced [in] lpu File unit number for res-file output [out] ierr Error flag
- Date
- Aug 2000
◆ readcontrolinput()
|
private |
Reads data for the control inputs from the solver input file.
- Parameters
-
[in] infp File unit number for the solver input file [in] engines All general functions in the model [in] sensors All sensors (function argument objects) in the model [out] input Control input parameters [out] mstat Status flags for the control variables [out] ierr Error flag
- Date
- Aug 2000
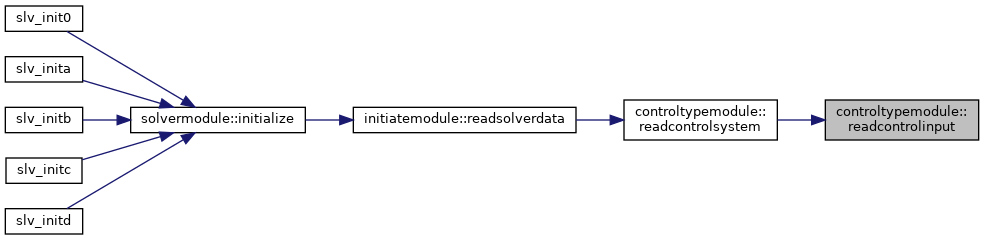
◆ readcontrolsystem()
| subroutine, public controltypemodule::readcontrolsystem | ( | integer, intent(in) | infp, |
| type(enginetype), dimension(:), intent(in) | engines, | ||
| type(sensortype), dimension(:), intent(in) | sensors, | ||
| type(controltype), intent(out) | ctrl, | ||
| integer, intent(out) | ierr | ||
| ) |
Initializes the ControlType object with data from the input file.
- Parameters
-
[in] infp File unit number for the solver input file [in] engines All general functions in the model [in] sensors All sensors (function argument objects) in the model [out] ctrl Control system data of the model [out] ierr Error flag
- Date
- Jul 2000
◆ readcontrolvariables()
| subroutine controltypemodule::readcontrolvariables | ( | integer, intent(in) | infp, |
| integer, dimension(:), intent(out) | mstat, | ||
| real(dp), dimension(:), intent(out) | vreg, | ||
| type(idtype), dimension(:), intent(out) | vregId, | ||
| integer, dimension(:), intent(out) | mvar, | ||
| integer, intent(in) | iprint, | ||
| integer, intent(in) | lpu, | ||
| integer, intent(out) | ierr | ||
| ) |
Reads status codes and initial conditions for the control variables.
- Parameters
-
[in] infp File unit number for the solver input file [out] mstat Status flags for the control variables [out] vreg The control state variables [out] vregId Id for the control line variables [out] mvar Control variables for extra control lines [in] iprint Print switch; the higher value the more print is produced [in] lpu File unit number for res-file output [out] ierr Error flag
This subroutine reads status codes and initial conditions for all control variables in the model from the solver input file. It also reads the Id of other control lines referring to each variable. This is needed such that the control variable value can be written to the results database for all control lines that refer to it (Bugfix #323).
- Date
- Aug 2000
- Date
- 29 Apr 2017
◆ writecontroltype()
| subroutine controltypemodule::writecontroltype | ( | type(controltype), intent(in) | ctrl, |
| integer, intent(in) | io, | ||
| integer, intent(in), optional | complexity | ||
| ) |
Standard routine for writing an object to io.
- Parameters
-
[in] ctrl Control system data [in] io File unit number to write to [in] complexity If present, the value indicates the amount of print
- Date
- 27 Jul 2000
◆ writectrlsysdb()
| subroutine, public controltypemodule::writectrlsysdb | ( | type(rdbtype), intent(inout) | rdb, |
| type(controltype), intent(in) | ctrl, | ||
| integer(i8), intent(in) | nStep, | ||
| real(dp), intent(in) | time, | ||
| integer, intent(out) | ierr | ||
| ) |
Writes control system data to the results database.
- Parameters
-
rdb Results database file for control system data [in] ctrl Control system data [in] nStep Time step number [in] time Current time [out] ierr Error flag
Only the arrays that need to be restored in a restart are saved.
- Date
- 25 Oct 2008
◆ writectrlsysheader()
| subroutine, public controltypemodule::writectrlsysheader | ( | type(controltype), intent(in) | ctrl, |
| type(idtype), intent(in) | mechId, | ||
| type(rdbtype), intent(inout) | rdb | ||
| ) |
Writes results database headers for the control system.
- Parameters
-
[in] ctrl Control system data [in] mechId Id of the mechanism object rdb Results database file for control system data
This subroutine saves only those arrays that need to be restored in a restart. The list of arrays stored must match that in controltypemodule::writectrlsysdb(), and should at least contain the arrays referred in restartmodule::readcontroldata().
- Date
- 25 Oct 2008