Module with subroutines for co-rotational superelement formulations. More...
Functions/Subroutines | |
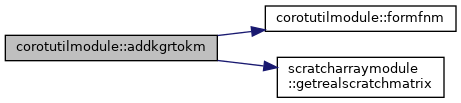
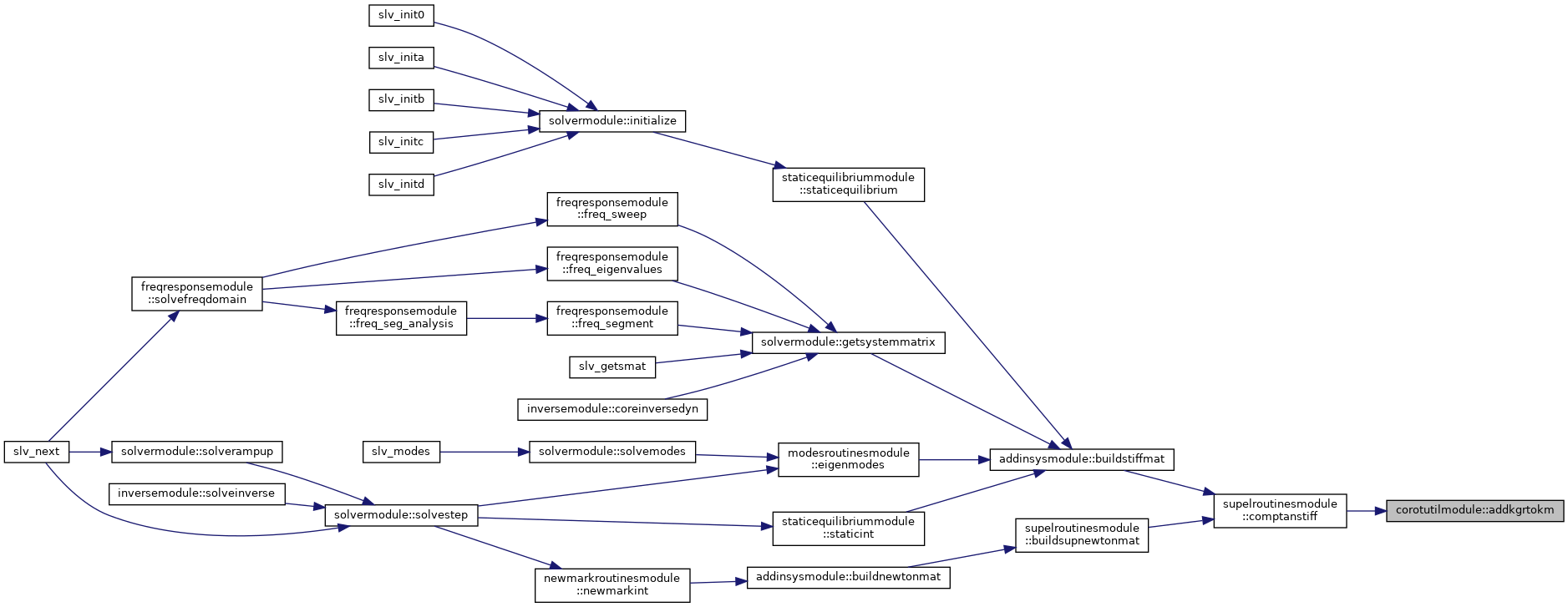
| subroutine, public | addkgrtokm (supEl, ktan, km, fint, ierr) |
| Calculates the rotational geometric stiffness for a superelement. More... | |
| subroutine | gmat3nod (gmat, x, y, z, ierr) |
| Computes the rotation gradient matrix for a 3-noded element. More... | |
| subroutine | gmat3nodlocal (gmat, x, y) |
| Computes the rotation gradient matrix for a 3-noded element. More... | |
| subroutine | mmat3nod (mmat, emat) |
| Sets up an eccentricity transformation matrix for a 3-noded element. More... | |
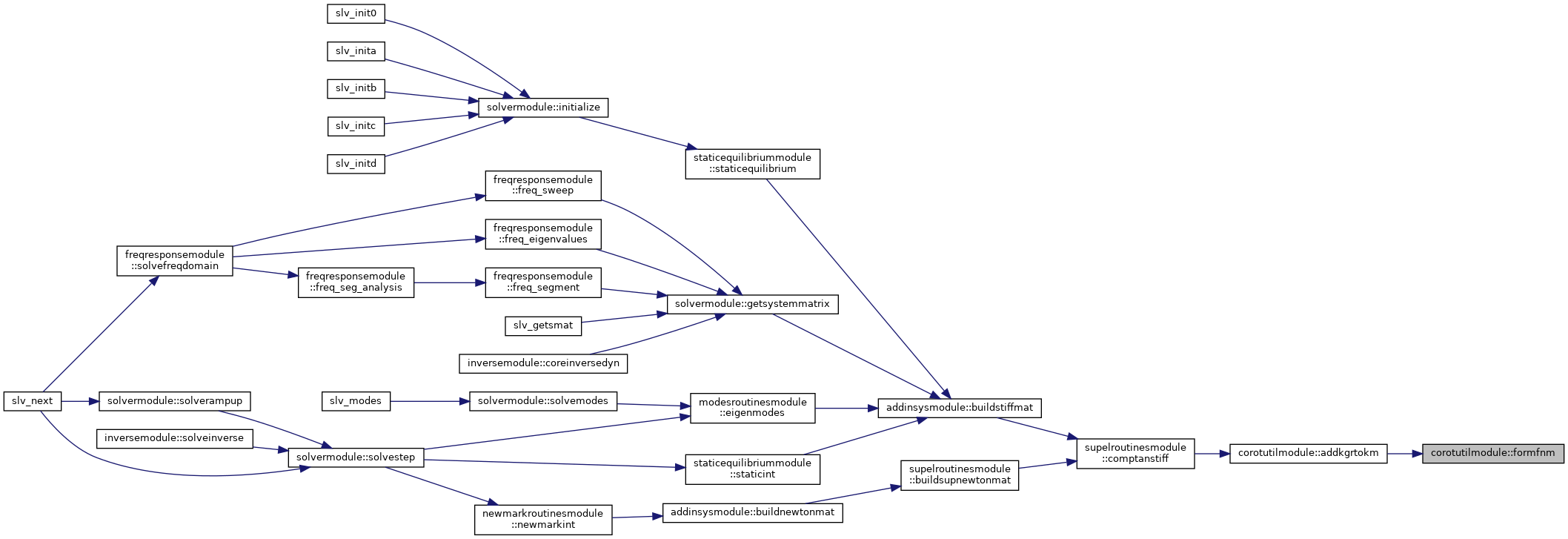
| subroutine | formfnm (triads, fint, fnm) |
| Forms the Fn matrix based on the internal force vector. More... | |
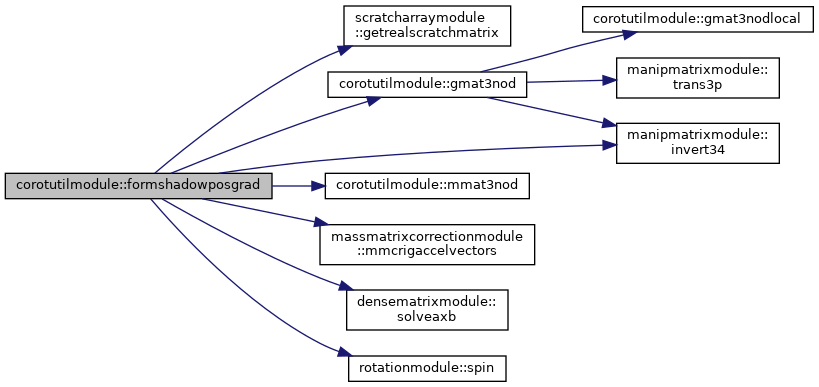
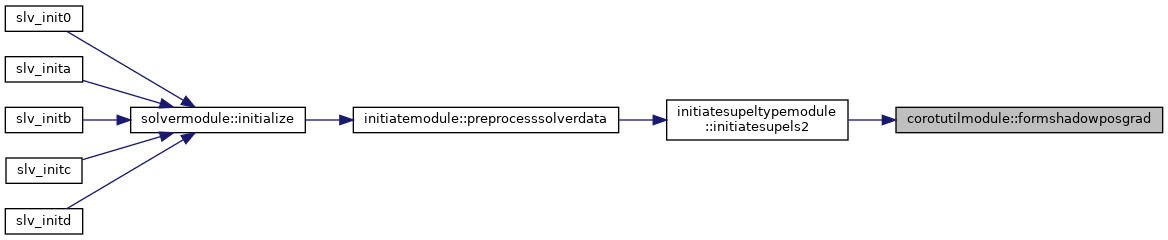
| subroutine, public | formshadowposgrad (supEl, dbgCorot, ierr) |
| Forms the gradient matrix used in the shadow position calculations. More... | |
Detailed Description
Module with subroutines for co-rotational superelement formulations.
Function/Subroutine Documentation
◆ addkgrtokm()
| subroutine, public corotutilmodule::addkgrtokm | ( | type(supeltype), intent(in) | supEl, |
| real(dp), dimension(:,:), intent(out) | ktan, | ||
| real(dp), dimension(:,:), intent(in) | km, | ||
| real(dp), dimension(:), intent(in) | fint, | ||
| integer, intent(out) | ierr | ||
| ) |
Calculates the rotational geometric stiffness for a superelement.
- Parameters
-
[in] supEl The superelement to calculation geometric stiffness for [out] ktan Tangential stiffness matrix (material + geometric stiff.) [in] km Material stiffness matrix [in] fint Internal force vector [out] ierr Error flag
- Date
- 23 Oct 1997
- Date
- 29 Oct 2003
◆ formfnm()
| subroutine corotutilmodule::formfnm | ( | type(triadptrtype), dimension(:), intent(in) | triads, |
| real(dp), dimension(:), intent(in) | fint, | ||
| real(dp), dimension(:,:), intent(out) | fnm | ||
| ) |
Forms the Fn matrix based on the internal force vector.
- Parameters
-
[in] triads External nodes in the superelement [in] fint Internal force vector of the superelement [out] fnm Then Fn matrix (see below)
The Fn matrix consists of the spin of the nodal force vectors with both axial and moment contributions, i.e.,
for each node ordered as columns.
◆ formshadowposgrad()
| subroutine, public corotutilmodule::formshadowposgrad | ( | type(supeltype), intent(inout) | supEl, |
| integer, intent(in) | dbgCorot, | ||
| integer, intent(out) | ierr | ||
| ) |
Forms the gradient matrix used in the shadow position calculations.
- Parameters
-
supEl The superelement to calculate the gradient matrix for [in] dbgCorot File unit number of debug pring [out] ierr Error flag
- Date
- Nov 2003
◆ gmat3nod()
| subroutine corotutilmodule::gmat3nod | ( | real(dp), dimension(3,3,3), intent(out) | gmat, |
| real(dp), dimension(3), intent(in) | x, | ||
| real(dp), dimension(3), intent(in) | y, | ||
| real(dp), dimension(3), intent(in) | z, | ||
| integer, intent(out) | ierr | ||
| ) |
Computes the rotation gradient matrix for a 3-noded element.
- Parameters
-
[out] gmat The rotation gradients in local system [in] x X-coordinates for the 3 nodes in global coordinate system [in] y Y-coordinates for the 3 nodes in global coordinate system [in] z Z-coordinates for the 3 nodes in global coordinate system [out] ierr Error flag
- Date
- 22 Oct 1997
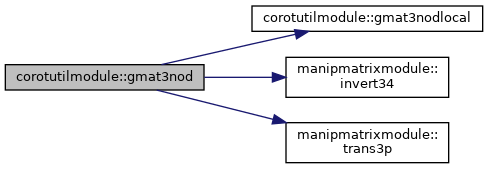

◆ gmat3nodlocal()
| subroutine corotutilmodule::gmat3nodlocal | ( | real(dp), dimension(3,9), intent(out) | gmat, |
| real(dp), dimension(3), intent(in) | x, | ||
| real(dp), dimension(3), intent(in) | y | ||
| ) |
Computes the rotation gradient matrix for a 3-noded element.
- Parameters
-
[out] gmat The rotation gradients in local system [in] x X-coordinates for the 3 nodes in local coordinate system [in] y Y-coordinates for the 3 nodes in local coordinate system
The element assumed in the xy-plane. The x-axis is not neccesarily along the side 1-2. The computed rotation gradient matrix gmat consists of rot_x,rot_y,rot_z in local system with respect to the local nodal degrees of freedom. The nodal DOF ordering for each node is assumed to be tx,ty,tz.
- Date
- 22 Oct 1997

◆ mmat3nod()
| subroutine corotutilmodule::mmat3nod | ( | real(dp), dimension(3,18), intent(out) | mmat, |
| real(dp), dimension(3,3), intent(in) | emat | ||
| ) |
Sets up an eccentricity transformation matrix for a 3-noded element.
- Parameters
-
[out] mmat The eccentricity transformation matrix (translations only) [in] emat Nodal eccentricities in local coordinates
- Date
- 23 Oct 1997
