Module with subroutines for damper calculations. More...
Functions/Subroutines | |
| subroutine | updatedampers (dampers, timeStep, restart, ierr, updateLV, updateVar) |
| Updates all axial- and joint dampers in the model. More... | |
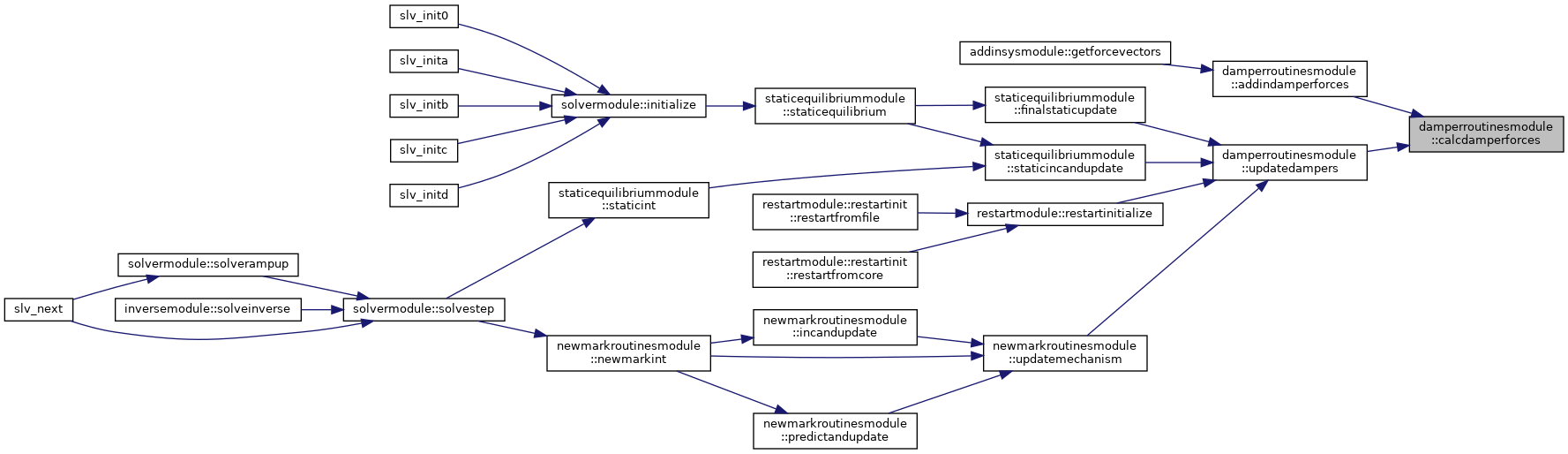
| subroutine, private | calcdamperforces (damper, eV) |
| Calculates system force vector contributions from a damper element. More... | |
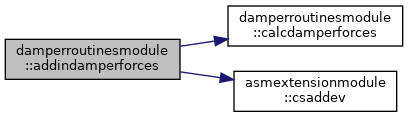
| subroutine | addindamperforces (FD, RF, damper, sam, ierr) |
| Assembles system force vector contributions from a damper element. More... | |
| subroutine | addindampermat (includeStressStiff, scaleC, scaleK, Nmat, damper, sam, ierr, Rhs) |
| Assembles system damping matrix contributions from a damper element. More... | |
Detailed Description
Module with subroutines for damper calculations.
This module contains a set of subroutines for performing various computation tasks on the dampertypemodule::dampertype objects in the model (axial- and joint dampers) during the dynamic or quasi-static simulation.
Function/Subroutine Documentation
◆ addindamperforces()
| subroutine damperroutinesmodule::addindamperforces | ( | real(dp), dimension(:), intent(inout) | FD, |
| real(dp), dimension(:), intent(inout) | RF, | ||
| type(dampertype), intent(in) | damper, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(inout) | ierr | ||
| ) |
Assembles system force vector contributions from a damper element.
- Parameters
-
FD System damping force vector RF System reaction forces associated with constrained DOFs [in] damper The damper element to calculate damping forces for [in] sam Data for managing system matrix assembly [out] ierr Error flag
- Date
- Feb 1999

◆ addindampermat()
| subroutine damperroutinesmodule::addindampermat | ( | logical, intent(in) | includeStressStiff, |
| real(dp), intent(in) | scaleC, | ||
| real(dp), intent(in) | scaleK, | ||
| type(sysmatrixtype), intent(inout) | Nmat, | ||
| type(dampertype), intent(in) | damper, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(out) | ierr, | ||
| real(dp), dimension(:), intent(inout), optional | Rhs | ||
| ) |
Assembles system damping matrix contributions from a damper element.
- Parameters
-
[in] includeStressStiff If .true., include geometric stiffness [in] scaleC Damping matrix scaling factor [in] scaleK Stiffness matrix scaling factor Nmat System newton matrix [in] damper The damper element to calculate damping matrix for [in] sam Data for managing system matrix assembly [out] ierr Error flag Rhs System right-hand-side vector associated with the Newton matrix
This subroutine calculates the damping matrix for a damper element and adds it into the system Newton matrix, multiplied by a factor, scaleC.
- Date
- Feb 1999


◆ calcdamperforces()
|
private |
Calculates system force vector contributions from a damper element.
- Parameters
-
[in] damper The damper element to calculate damping forces for [out] eV Element damping force vector
- Date
- 18 Feb 2008
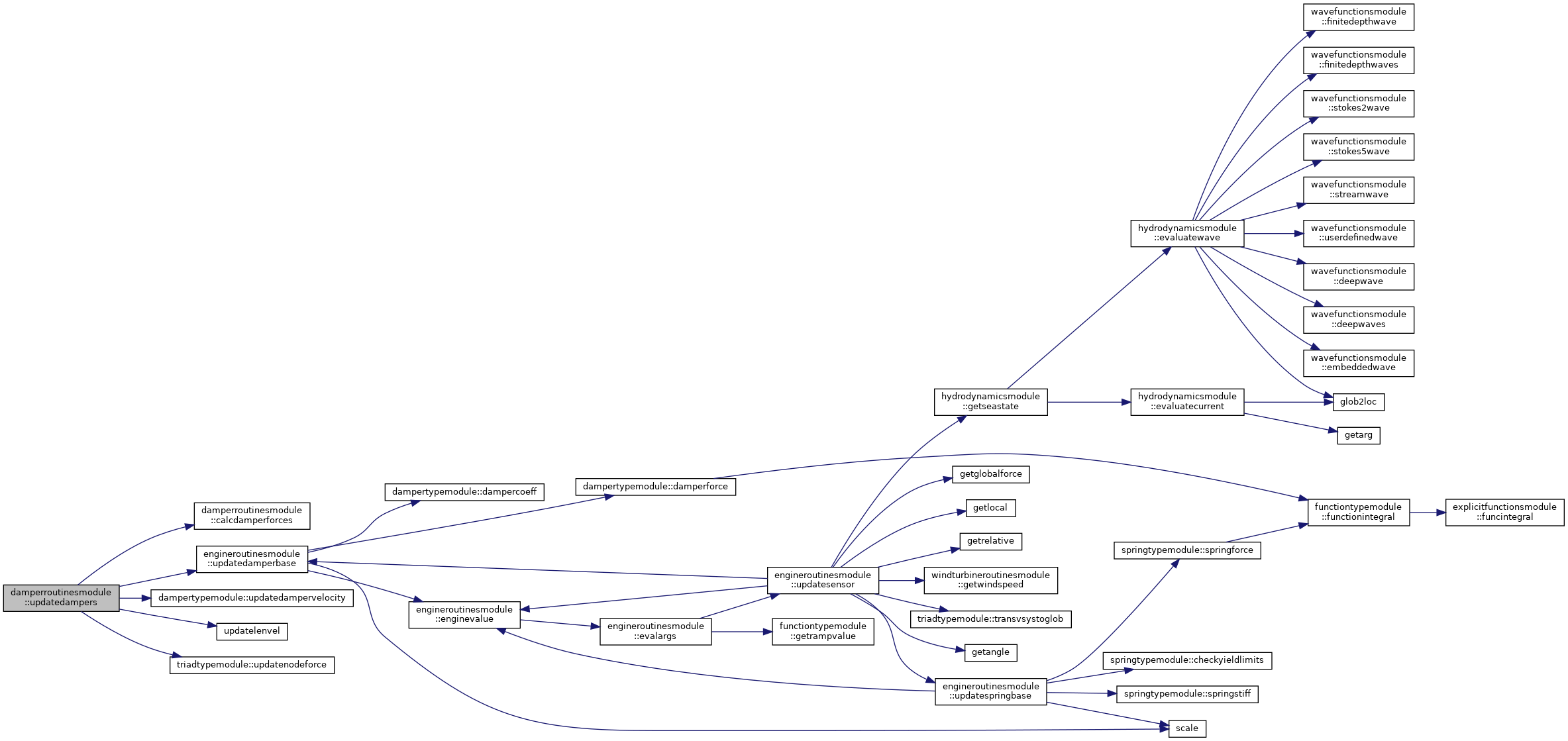
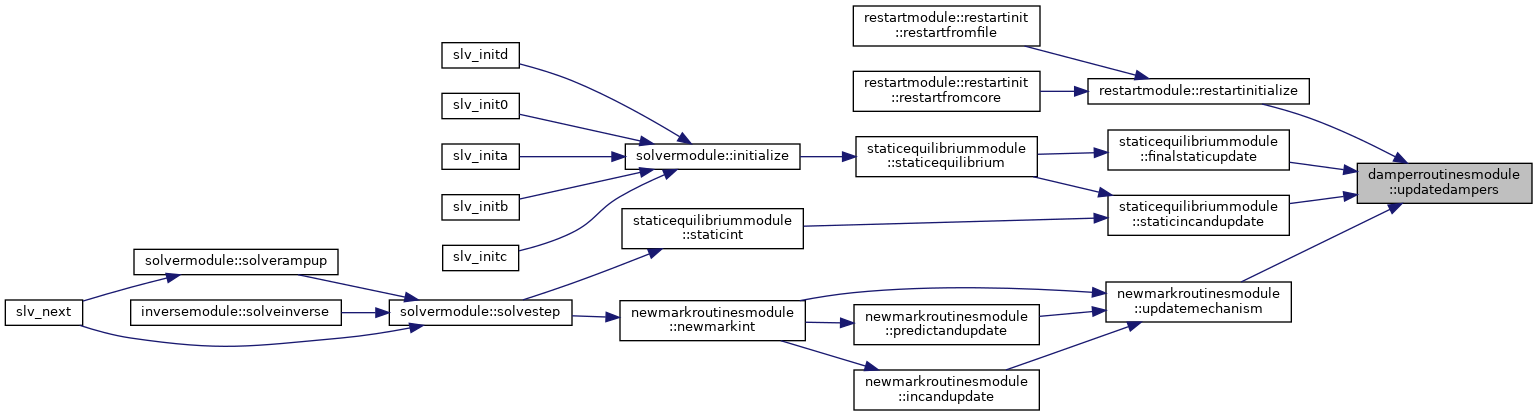
◆ updatedampers()
| subroutine damperroutinesmodule::updatedampers | ( | type(dampertype), dimension(:), intent(inout) | dampers, |
| real(dp), intent(in) | timeStep, | ||
| logical, intent(in) | restart, | ||
| integer, intent(inout) | ierr, | ||
| logical, intent(in), optional | updateLV, | ||
| logical, intent(in), optional | updateVar | ||
| ) |
Updates all axial- and joint dampers in the model.
- Parameters
-
dampers All damper elements in the model [in] timeStep Current time increment size [in] restart If .true., we are initializing after restart ierr Error flag [in] updateLV If .true., update axial damper lengths and velocities [in] updateVar If .true., update all other damper variables
The updated length and velocity (and direction) for axial dampers are calculated first. Then all the remaining damper variables are updated. This is to ensure that sensors measuring damper length/velocity are up to date before they are used by engines. Note that for joint dampers, the damper length (and velocity unless deformational damper) coincide with the corresponding joint variables of the owner joint, and need therefore not to be updated here.
- Date
- 11 Jun 2002
- Date
- 14 Jan 2004