Module with subroutines for generic part calculations. More...
Functions/Subroutines | |
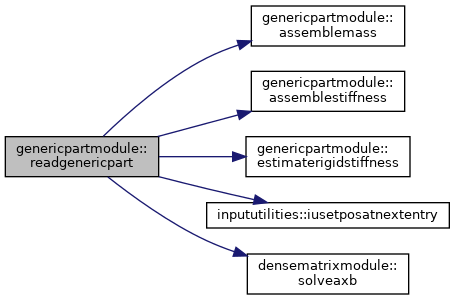
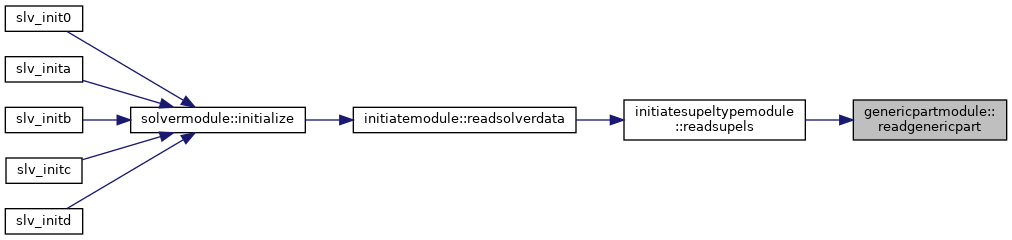
| subroutine, public | readgenericpart (infp, sup, ierr) |
| Reads generic part properties from the solver input file. More... | |
| subroutine | estimaterigidstiffness (sup, mass, inertia, kt, kr) |
| Calculates semi-rigid stiffness coefficients for a generic part. More... | |
| subroutine | assemblestiffness (sup, K, kt, kr, stiffness) |
| Assembles the stiffness matrix for a generic part. More... | |
| subroutine | assemblemass (M, mass, inertia) |
| Assembles the mass matrix for a generic part. More... | |
| subroutine, public | initiategenericparts (sups) |
| Initializes more generic part data after system initialization. More... | |
Detailed Description
Module with subroutines for generic part calculations.
This module contains some subroutines for setting up the stiffness- and mass matrix for a superelement defined only by its hard-point connections and the center of gravity. The superelement is then represented by rigid arms from the CoG to the hard-points (triads), with some stiffness assigned at the hard-point locations. See Appendix A.16 in the theory guide for the details.
Function/Subroutine Documentation
◆ assemblemass()
| subroutine genericpartmodule::assemblemass | ( | real(dp), dimension(:,:), intent(out) | M, |
| real(dp), intent(in) | mass, | ||
| real(dp), dimension(:), intent(in) | inertia | ||
| ) |
Assembles the mass matrix for a generic part.
- Parameters
-
[out] M Assembled superelement mass matrix [in] mass Total mass of the superelement [in] inertia Total inertia of the superelement
Assuming that all mass is coupled to the first triad (the CoG).
- Date
- 21 Jan 2004

◆ assemblestiffness()
| subroutine genericpartmodule::assemblestiffness | ( | type(supeltype), intent(in) | sup, |
| real(dp), dimension(:,:), intent(out) | K, | ||
| real(dp), intent(in) | kt, | ||
| real(dp), intent(in) | kr, | ||
| real(dp), dimension(:,:), intent(in) | stiffness | ||
| ) |
Assembles the stiffness matrix for a generic part.
- Parameters
-
[in] sup The superelement object representing the generic part [out] K Assembled superelement stiffness matrix [in] kt Translational stiffness coefficient [in] kr Rotational stiffness coefficient [in] stiffness Individual nodal stiffness coefficients
The part of the stiffness matrix associated with the CoG and one of the other triads of the generic part is assumed to be:
where kt and kr are diagonal 3x3 stiffness matrices for translational and rotational DOFs, respectively, and e is the eccentricity vector giving the relative position of the hard-point with respect to the CoG.
- Date
- 21 Jan 2004

◆ estimaterigidstiffness()
| subroutine genericpartmodule::estimaterigidstiffness | ( | type(supeltype), intent(in) | sup, |
| real(dp), intent(in) | mass, | ||
| real(dp), dimension(:), intent(in) | inertia, | ||
| real(dp), intent(out) | kt, | ||
| real(dp), intent(out) | kr | ||
| ) |
Calculates semi-rigid stiffness coefficients for a generic part.
- Parameters
-
[in] sup The superelement object representing the generic part [in] mass Total mass of the superelement [in] inertia Total inertial of the superelement [out] kt Translational stiffness coefficient [out] kr Rotational stiffness coefficient
This subroutine estimates the stiffness coefficients to be assigned at each triad of the superelement, such that it behaves like completely rigid. The estimate is based on the given mass and a user-specified target eigenfrequency.
- Date
- 28 Oct 2004

◆ initiategenericparts()
| subroutine, public genericpartmodule::initiategenericparts | ( | type(supeltype), dimension(:), intent(inout) | sups | ) |
Initializes more generic part data after system initialization.
- Parameters
-
sups Array of all superelements in the model
- Date
- 28 Aug 2013
◆ readgenericpart()
| subroutine, public genericpartmodule::readgenericpart | ( | integer, intent(in) | infp, |
| type(supeltype), intent(inout) | sup, | ||
| integer, intent(out) | ierr | ||
| ) |
Reads generic part properties from the solver input file.
- Parameters
-
[in] infp File unit number for the solver input file sup The superelement object which is a generic part [out] ierr Error flag
This subroutine reads stiffness and mass properties for a generic part and generate the equivalent superelement matrices. Optionally, the center of gravity (CoG) triad is condensed condense out.
- Date
- 16 Jan 2004