Module with subroutines for hydrodynamic load calculations. More...
Data Types | |
| interface | updateatconvergence |
| Updates hydrodynamics quantities after a time step is converged. More... | |
Functions/Subroutines | |
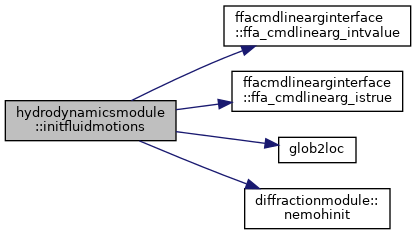
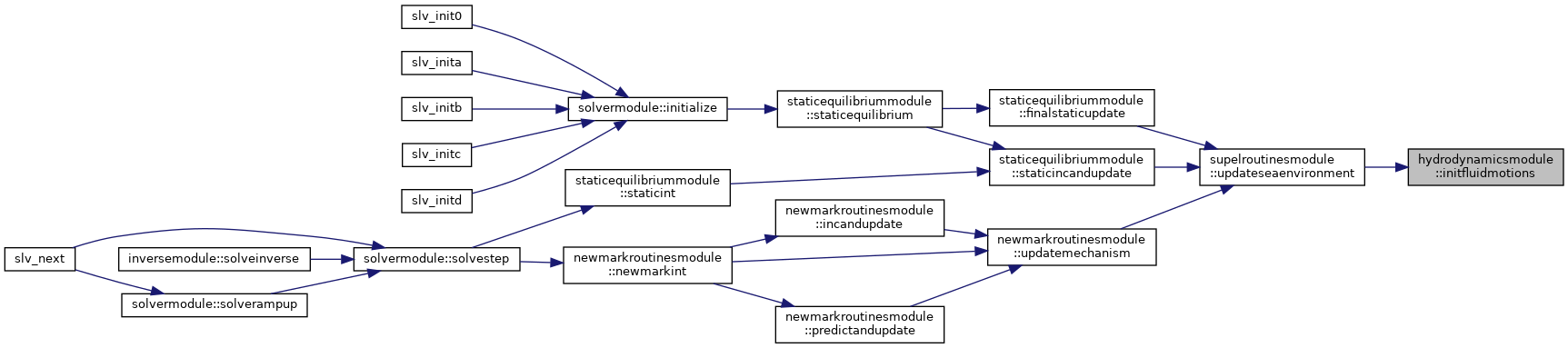
| subroutine, public | initfluidmotions (time, env, triads, sups, ierr) |
| Initializes the fluid particle motion cache for all triads in water. More... | |
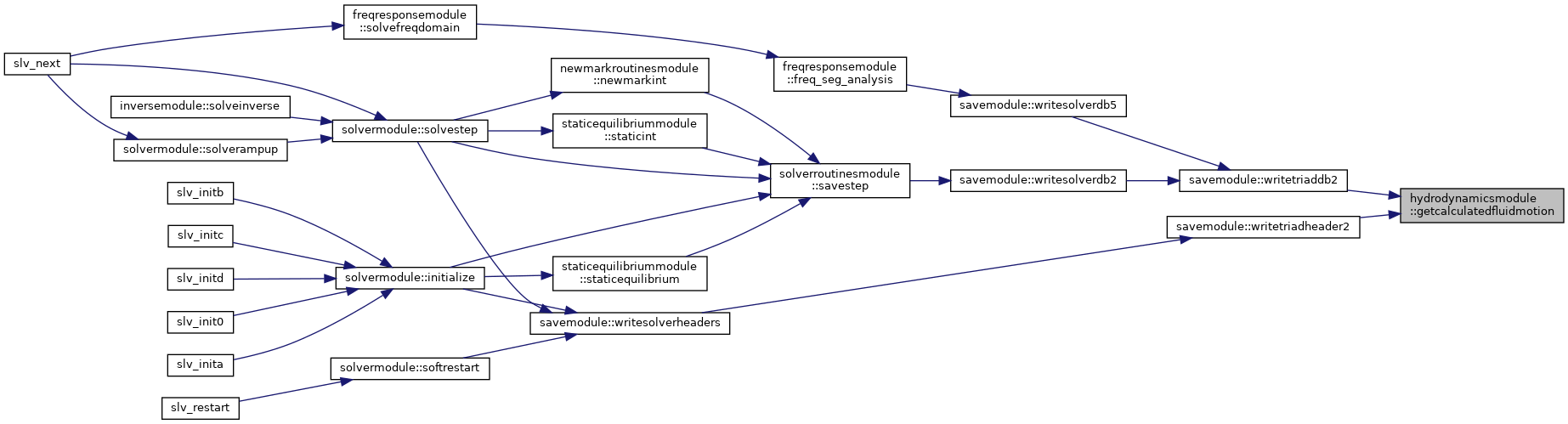
| logical function, public | getcalculatedfluidmotion (triad, elev, fvel, facc) |
| Returns the latest calculated fluid particle motion at a triad. More... | |
| real(dp) function | watersurfacenormal (normal, gravity, Tlg) |
| Returns the water surface normal vector in local coordinate system. More... | |
| subroutine | evaluatewave (waveFunc, waveTheory, Twave, g, depth, Xg, time, scale, wave, dynp, stat) |
| Evaluates the wave profile, velocity and acceleration at a point. More... | |
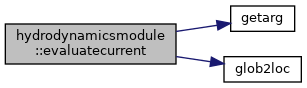
| subroutine | evaluatecurrent (currFunc, dirFunc, Tsea, Xg, time, scale, cvel, stat) |
| Evaluates the sea current velocity at the given point and time. More... | |
| subroutine | evaluatesea (env, g, time, istep, inod, x, waterMotion, stat) |
| Evaluates the sea state at the given point and time. More... | |
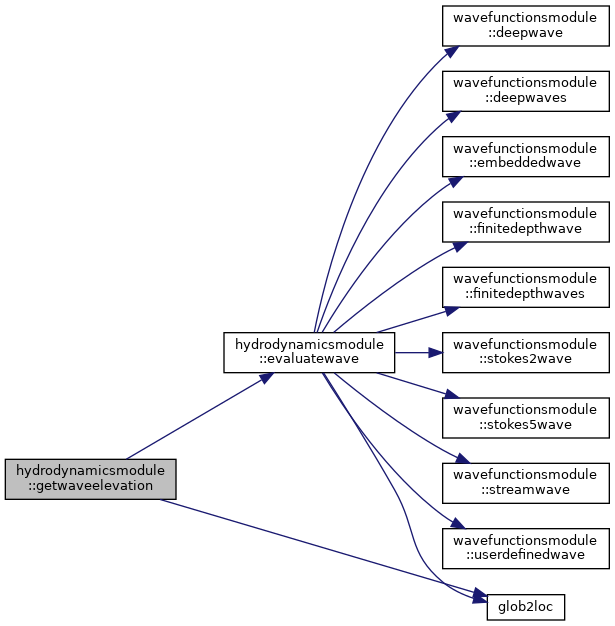
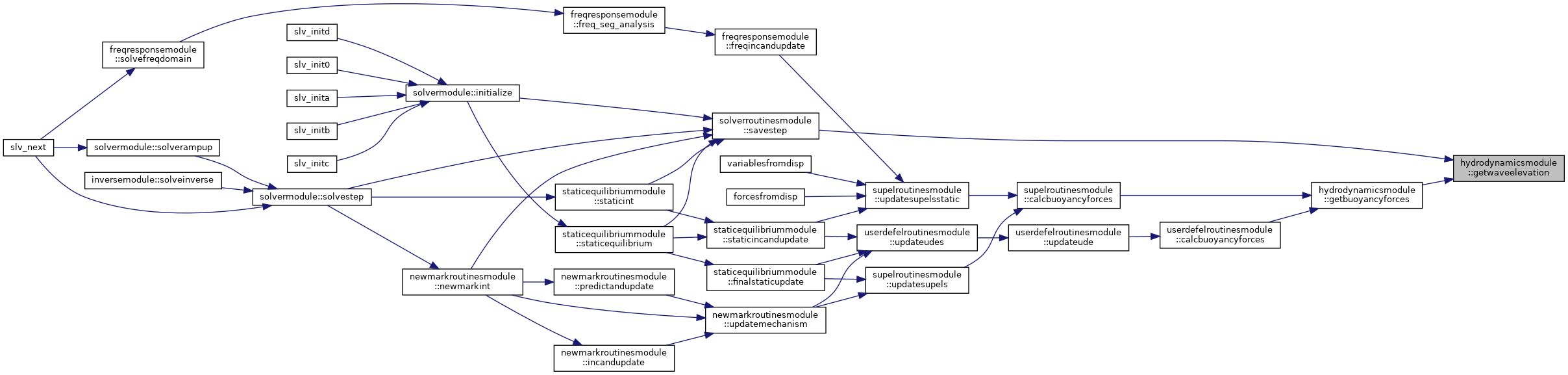
| real(dp) function, public | getwaveelevation (env, Xg, time, stat) |
| Returns the wave height at the given point and time. More... | |
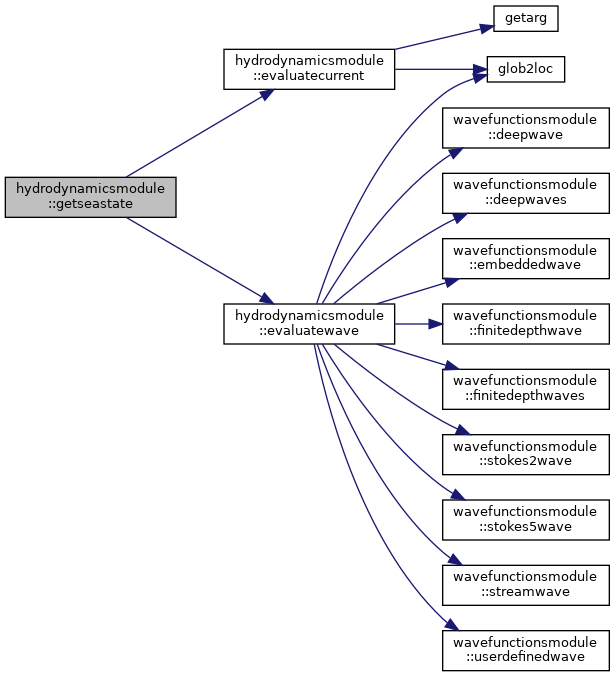
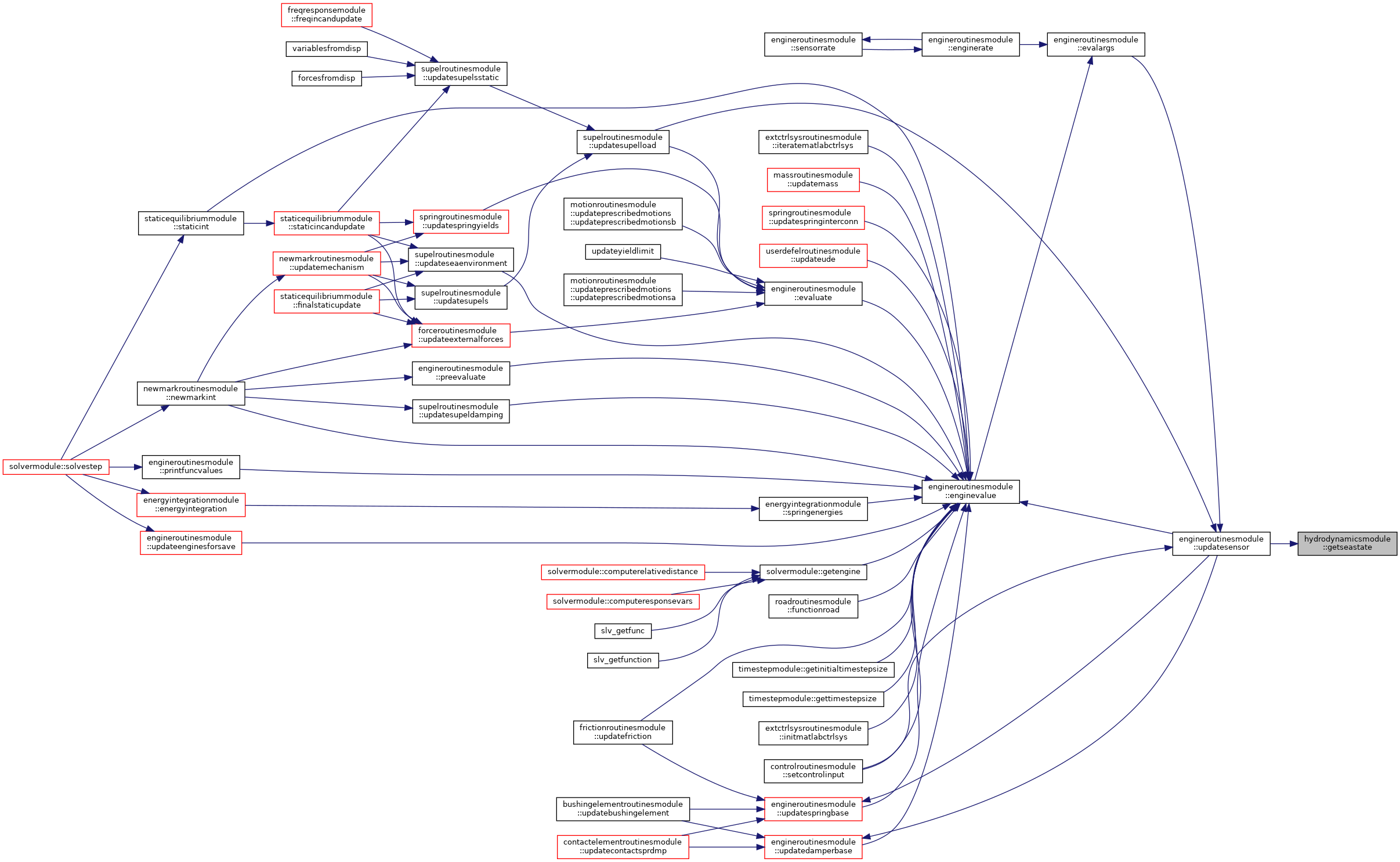
| subroutine, public | getseastate (env, time, Xg, sea, stat) |
| Evaluates the sea state at the given point and time. More... | |
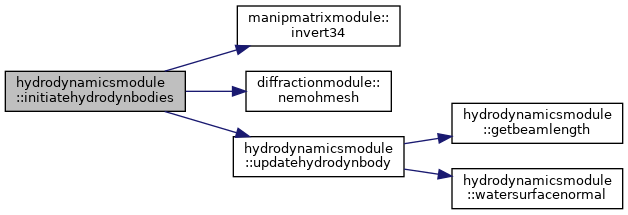
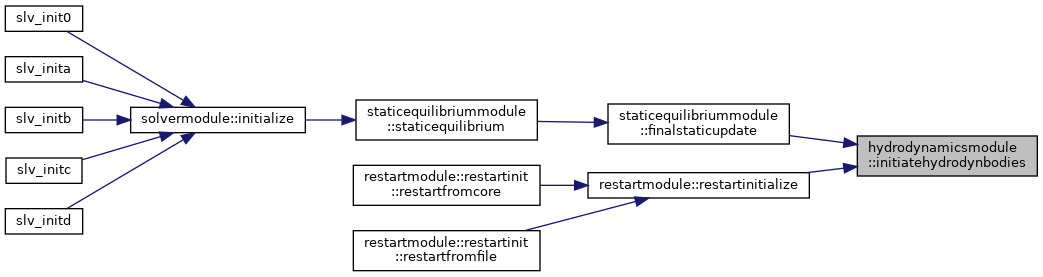
| subroutine, public | initiatehydrodynbodies (sups, elms, env, restart, ierr) |
| Initializes all hydrodynamic bodies in the model. More... | |
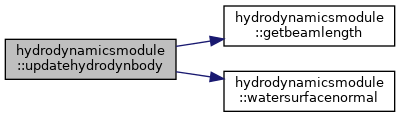
| subroutine | updatehydrodynbody (hydyn, triads, supTr, sLev, gravity, g, wb, ierr) |
| Updates the hydrodynamic body quantities. More... | |
| subroutine | getbeamlength (triad1, triad2, normal, h1, h2, Tlg, weight, Lb, C0b, iEnd) |
| Computes the buoyancy length and center for a two-noded beam. More... | |
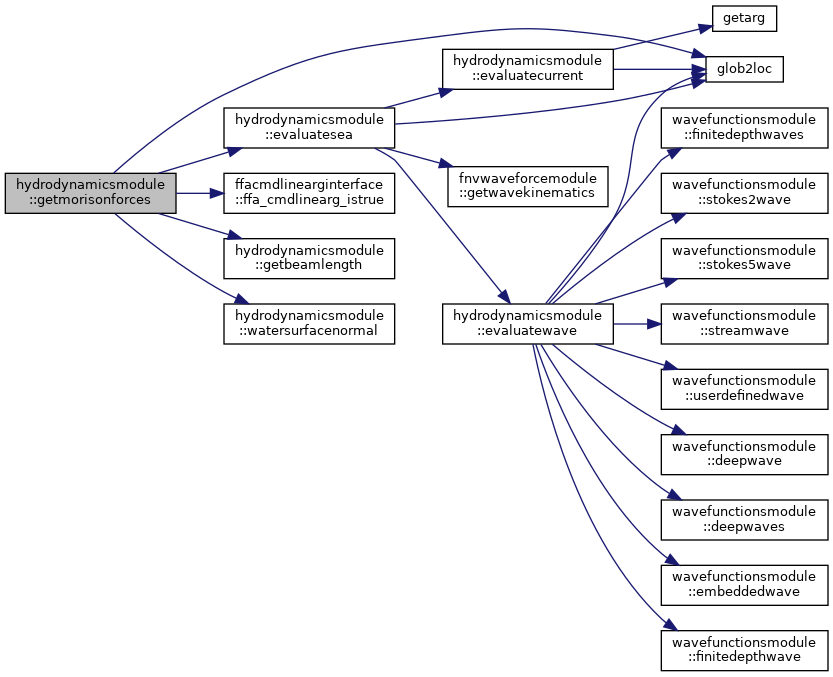
| subroutine, public | getmorisonforces (beamId, triads, supTr, urd, urdd, Q, eMa, eCd, hydyn, env, time, istep, iter, ierr) |
| Calculates Morison force contributions for a two-noded beam element. More... | |
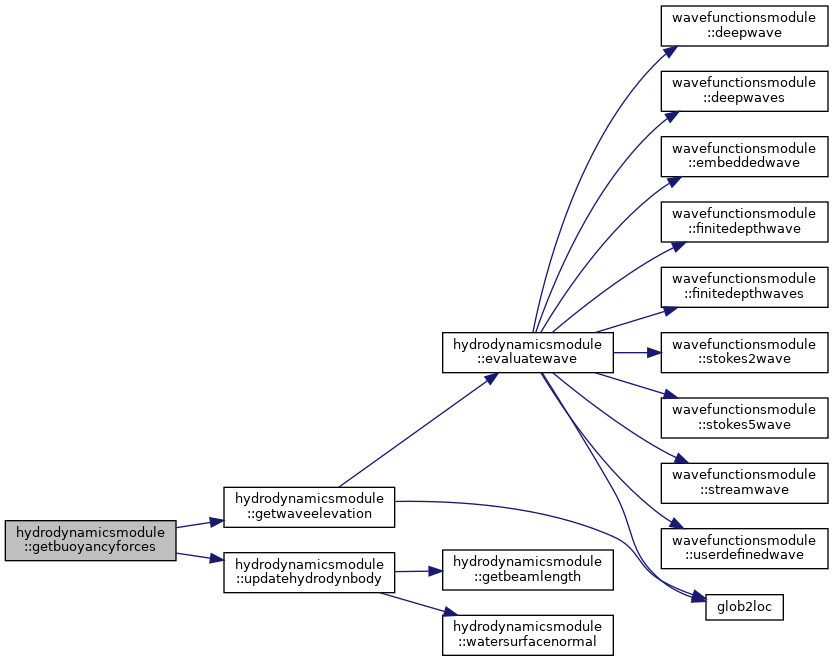
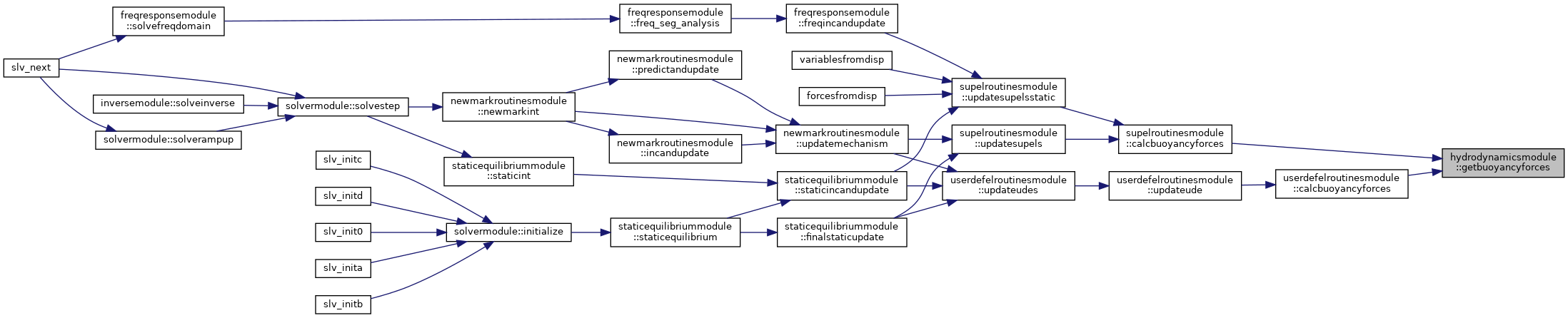
| subroutine, public | getbuoyancyforces (supId, triads, supTr, hydyn, env, g, time, iter, Q, ierr) |
| Calculates buoyancy force resultant for a superelement or beam. More... | |
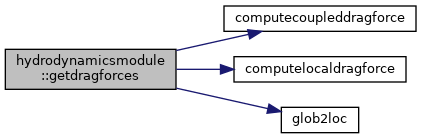
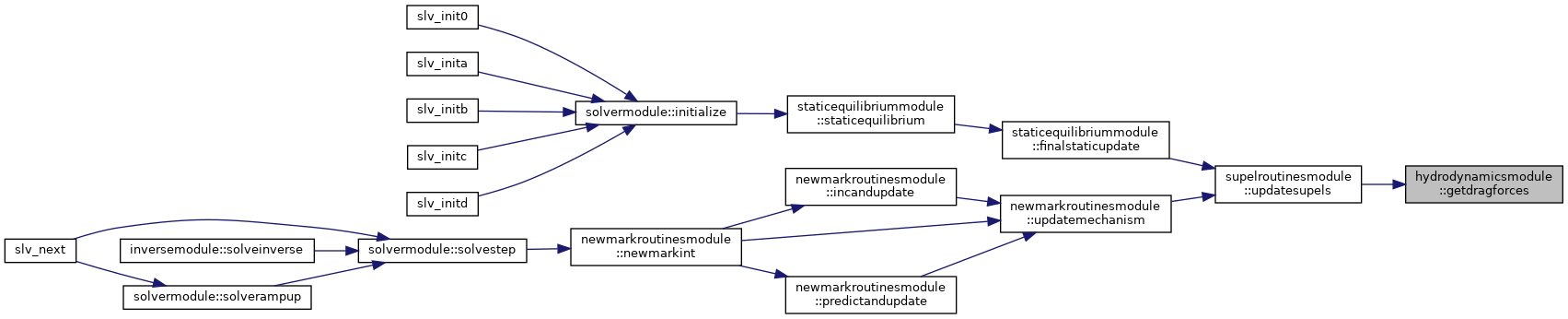
| subroutine, public | getdragforces (Fd, sup, hydyn, env, time, dt, ierr) |
| Calculates drag (and slam) forces for a (partly) submerged body. More... | |
| subroutine | updatehydrodynamicsatconvergence (hydyn, supTr, ierr) |
| Updates the HydroDynType object after convergence has been achieved. More... | |
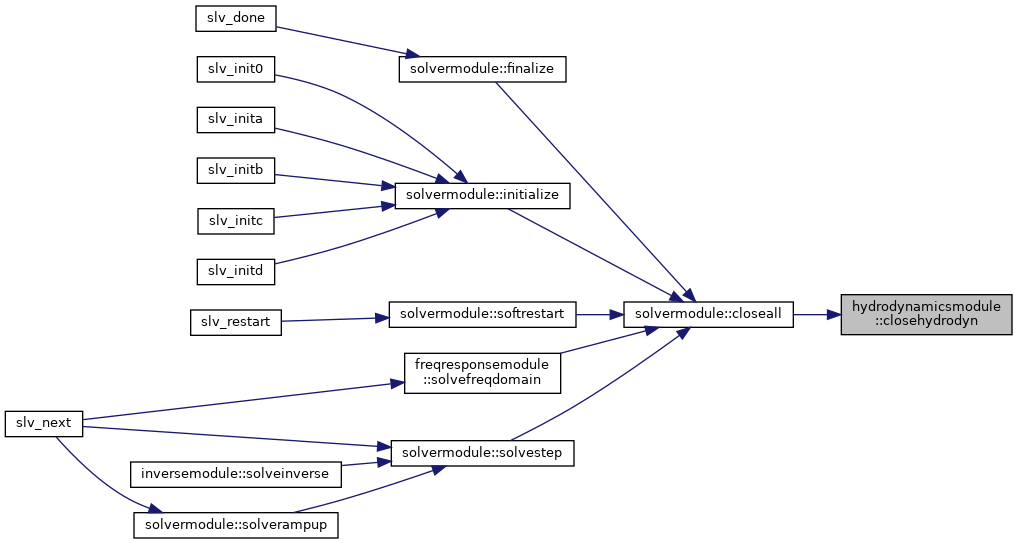
| subroutine, public | closehydrodyn (lpu) |
| Closes the hydrodynamics module and report some timings. More... | |
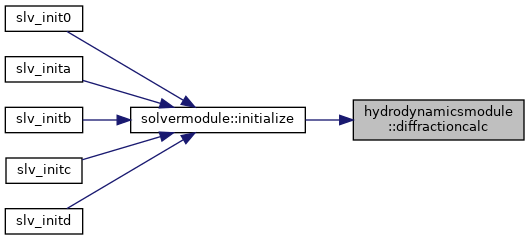
| subroutine, public | diffractioncalc (env, waveFunc, ierr) |
| Performs diffraction analysis using Nemoh. More... | |
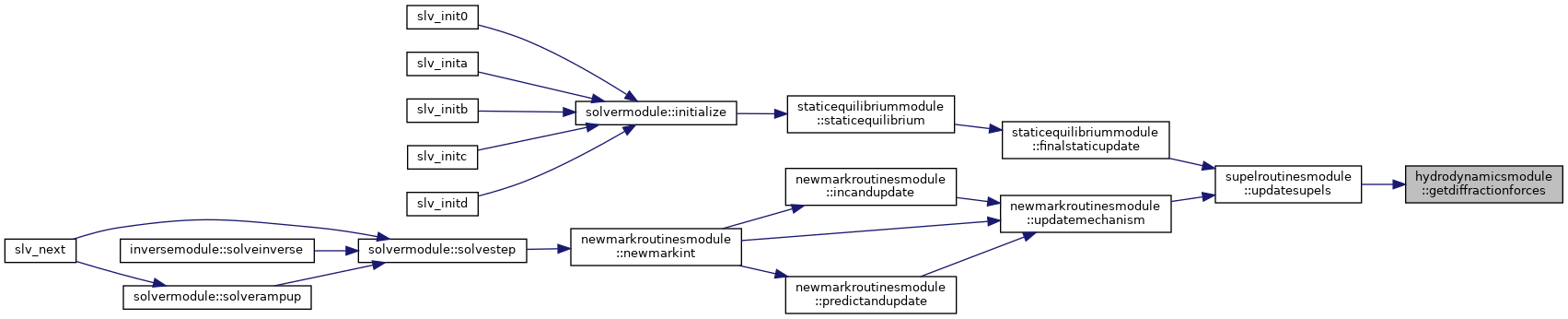
| subroutine, public | getdiffractionforces (Q, sup, hydyn, env, time, ierr) |
| Extracts the diffraction force at a given time for a superelement. More... | |
Variables | |
| real(dp), dimension(:,:), allocatable, save | watermotion |
| Fluid particle motions. More... | |
| integer, dimension(:), allocatable, save | calcwmotion |
| Have calculated motions? More... | |
| real(dp), parameter | eps_p = 1.0e-16_dp |
| Zero tolerance. More... | |
Detailed Description
Module with subroutines for hydrodynamic load calculations.
This module deals with the calculation of hydrodynamic loads (buoyancy, inertia loads due to added mass, damping forces due to drag, etc.) for beam- and superelements. It also manages the evaluation of the fluid particle motions, which are needed in the hydrodynamic load calculations.
Some of the subroutines and functions of this module are not documented. You have to configure doxygen with the option ENABLED_SECTIONS = FULL_DOC to extract detailed documentation of those subroutines and functions.
Function/Subroutine Documentation
◆ closehydrodyn()
| subroutine, public hydrodynamicsmodule::closehydrodyn | ( | integer, intent(in) | lpu | ) |
Closes the hydrodynamics module and report some timings.
- Parameters
-
[in] lpu File unit number for res-file output
- Date
- 9 Jan 2012

◆ diffractioncalc()
| subroutine, public hydrodynamicsmodule::diffractioncalc | ( | type(environmenttype), intent(in) | env, |
| type(functiontype), intent(in) | waveFunc, | ||
| integer, intent(out) | ierr | ||
| ) |
Performs diffraction analysis using Nemoh.
- Parameters
-
[in] env Environmental data [in] waveFunc The wave function to use in the diffraction analysis [out] ierr Error flag
- Date
- 06 Mar 2015

◆ evaluatecurrent()
| subroutine hydrodynamicsmodule::evaluatecurrent | ( | type(functiontype), pointer | currFunc, |
| type(functiontype), pointer | dirFunc, | ||
| real(dp), dimension(3,4), intent(in) | Tsea, | ||
| real(dp), dimension(3), intent(in) | Xg, | ||
| real(dp), intent(in) | time, | ||
| real(dp), intent(in) | scale, | ||
| real(dp), dimension(3), intent(out) | cvel, | ||
| integer, intent(inout) | stat | ||
| ) |
Evaluates the sea current velocity at the given point and time.
- Parameters
-
[in] currFunc The sea current velocity function to evaluate for [in] dirFunc The sea current direction function [in] Tsea Coordinate system for the sea current [in] Xg Global coordinates of the evaluation point [in] time Current simulation time [in] scale Scaling factor [out] cvel Sea current velocity in global axis directions stat Status flag (negative on error exit). 1 = The point is below or on the water surface. 2 = The point is above the water surface (no kinematics).
- Date
- 27 Oct 2009
◆ evaluatesea()
|
private |
Evaluates the sea state at the given point and time.
- Parameters
-
[in] env Environmental data [in] g Gravitation constant [in] time Current simulation time [in] istep Time increment counter [in] inod Nodal number of sea kinematics evaluation point [in] x Global coordinates of sea kinematics evaluation point [out] waterMotion Sea kinematics state at current point. waterMotion(1:3) = Projection of point x onto the current sea surface. waterMotion(4:6) = Particle velocity at point x in global coordinates. waterMotion(7:9) = Particle acceleration at point x in global coordinates. stat Status flag (negative on error exit)
- Date
- 9 Sep 2011
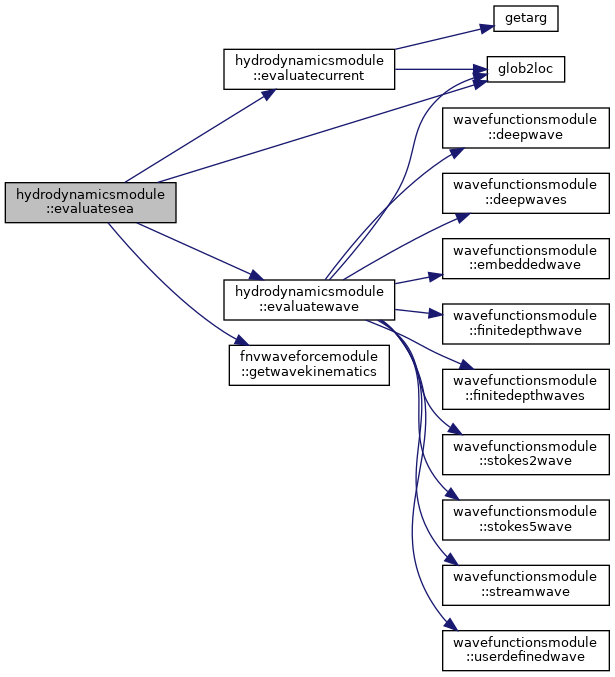

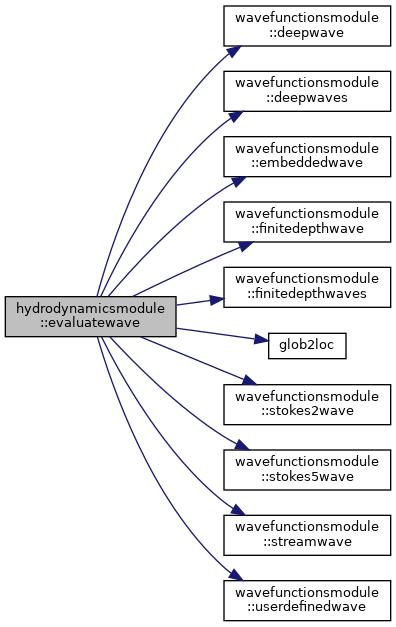
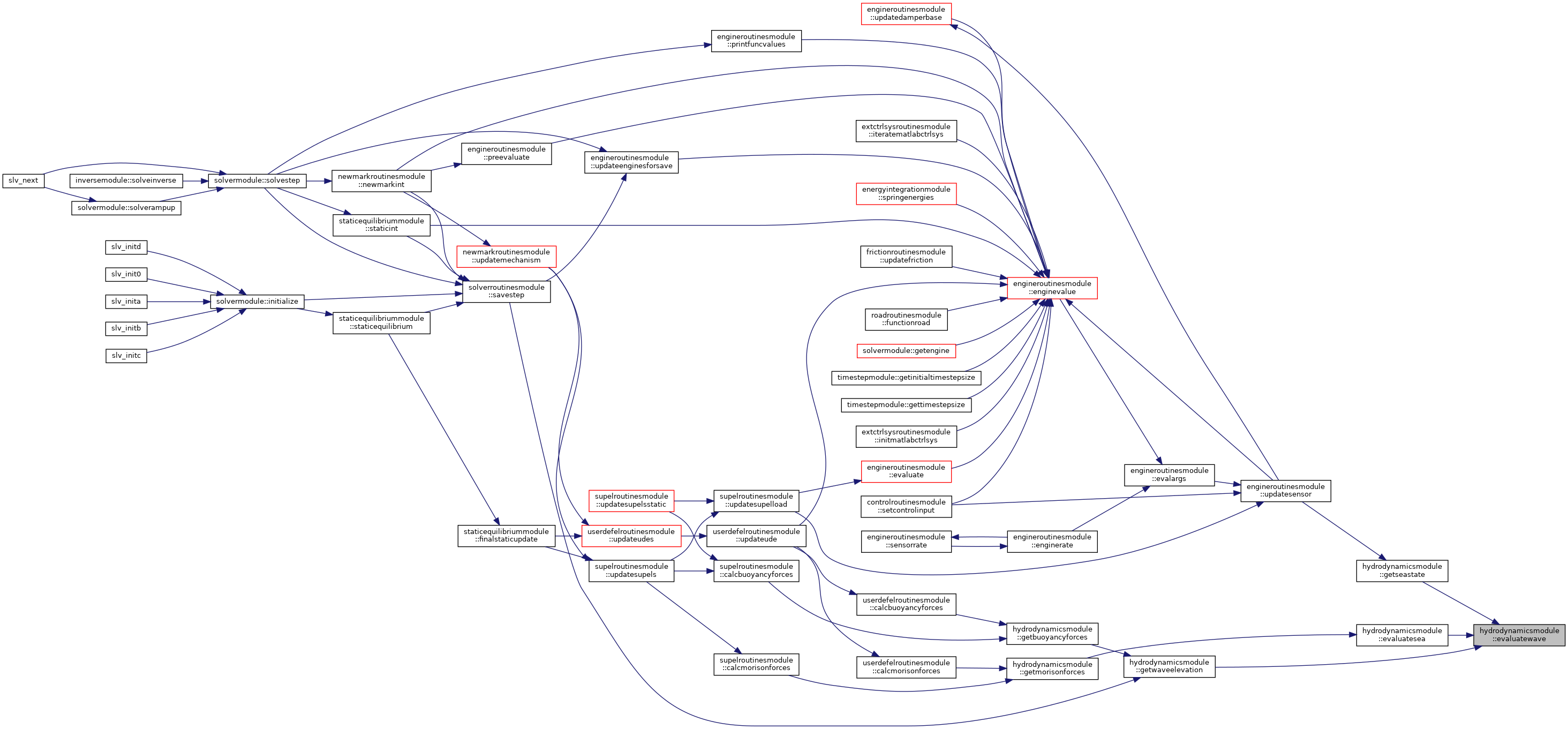
◆ evaluatewave()
| subroutine hydrodynamicsmodule::evaluatewave | ( | type(functiontype), intent(in) | waveFunc, |
| integer, intent(in) | waveTheory, | ||
| real(dp), dimension(3,4), intent(in) | Twave, | ||
| real(dp), intent(in) | g, | ||
| real(dp), intent(in) | depth, | ||
| real(dp), dimension(3), intent(in) | Xg, | ||
| real(dp), intent(in) | time, | ||
| real(dp), intent(in) | scale, | ||
| real(dp), dimension(3,3), intent(out) | wave, | ||
| real(dp), intent(out), optional | dynp, | ||
| integer, intent(inout) | stat | ||
| ) |
Evaluates the wave profile, velocity and acceleration at a point.
- Parameters
-
[in] waveFunc The wave function to evaluate for [in] waveTheory Flag indicating which wave theory to use [in] Twave Wave coordinate system (axis directions and origin) [in] g Gravitation constant [in] depth Water depth (zero means infinite) [in] Xg Global coordinates of the evaluation point [in] time Current simulation time [in] scale Scaling factor [out] wave Wave kinematics quantities at the evaluation point. wave(:,1) = Projection of point coordinates onto the current sea surface. wave(:,2) = Water particle velocity. wave(:,3) = Water particle acceleration. [out] dynp Dynamic pressure (optional) stat Status flag (negative on error exit). 1 = The point is below or on the water surface. 2 = The point is above the water surface (no kinematics).
The calculated wave kinematics quantities are referring to the global coordinate system, unless when stat is negative on entry. In the latter case the wave coordinate system is used.
- Date
- 25 Mar 2009
◆ getbeamlength()
| subroutine hydrodynamicsmodule::getbeamlength | ( | type(triadtype), intent(in) | triad1, |
| type(triadtype), intent(in) | triad2, | ||
| real(dp), dimension(3), intent(in) | normal, | ||
| real(dp), intent(in) | h1, | ||
| real(dp), intent(in) | h2, | ||
| real(dp), dimension(3,4), intent(in), optional | Tlg, | ||
| real(dp), dimension(2), intent(out), optional | weight, | ||
| real(dp), intent(out) | Lb, | ||
| real(dp), dimension(3), intent(out), optional | C0b, | ||
| integer, intent(out), optional | iEnd | ||
| ) |
Computes the buoyancy length and center for a two-noded beam.
- Parameters
-
[in] triad1 Triad art first end of the beam [in] triad2 Triad art second end of the beam [in] normal Normal vector of the water surface in global coordinates [in] h1 Height of the water surface along the normal vector for end 1 [in] h2 Height of the water surface along the normal vector for end 2 [in] Tlg Local to global transformation matrix for the beam element [out] weight Buoyancy weight factors [out] Lb Length of the submerged part of the beam (buoyancy length) [out] C0b Centre of buoyancy [out] iEnd Which end is below the water surface, if partly submerged. iEnd < 0 : This element is completely submerged. iEnd = 0 : This element is completely in the air.
- Date
- 29 Sep 2008

◆ getbuoyancyforces()
| subroutine, public hydrodynamicsmodule::getbuoyancyforces | ( | character(len=*), intent(in) | supId, |
| type(triadptrtype), dimension(:), intent(in) | triads, | ||
| real(dp), dimension(:,:), intent(in) | supTr, | ||
| type(hydrodyntype), intent(inout) | hydyn, | ||
| type(environmenttype), intent(inout) | env, | ||
| real(dp), intent(out) | g, | ||
| real(dp), intent(in) | time, | ||
| integer, intent(in) | iter, | ||
| real(dp), dimension(:), intent(inout), optional | Q, | ||
| integer, intent(out) | ierr | ||
| ) |
Calculates buoyancy force resultant for a superelement or beam.
- Parameters
-
[in] supId ID string of the superelement used in feedback messages [in] triads Triads connected to the superelement [in] supTr Position matrix for the superelement hydyn Data for hydrodynamic force calculation env Environmental data [out] g Gravitation constant [in] time Current simulation time [in] iter Iteration counter Q External nodal forces for beams, including buoyancy on output [out] ierr Error flag
The contributions to the external load vector form the hydrostatic buoyancy may optionally be calculated, but only for two-noded elements.
- Date
- 2 Jul 2008
◆ getcalculatedfluidmotion()
| logical function, public hydrodynamicsmodule::getcalculatedfluidmotion | ( | type(triadtype), intent(in) | triad, |
| real(dp), intent(out), optional | elev, | ||
| real(dp), dimension(3), intent(out), optional | fvel, | ||
| real(dp), dimension(3), intent(out), optional | facc | ||
| ) |
Returns the latest calculated fluid particle motion at a triad.
- Parameters
-
[in] triad The triad object to get particle motion data for [out] elev Sea surface elevation at the triad location [out] fvel Water particle velocity at the triad location [out] facc Water particle acceleration at the triad location
- Date
- 29 Nov 2010
◆ getdiffractionforces()
| subroutine, public hydrodynamicsmodule::getdiffractionforces | ( | real(dp), dimension(:), intent(inout) | Q, |
| type(supeltype), intent(in) | sup, | ||
| type(hydrodyntype), intent(inout) | hydyn, | ||
| type(environmenttype), intent(in) | env, | ||
| real(dp), intent(in) | time, | ||
| integer, intent(inout) | ierr | ||
| ) |
Extracts the diffraction force at a given time for a superelement.
- Parameters
-
Q External forces at centre of gravity including diffraction effects [in] sup Superelement to extract diffraction forces hydyn Data for hydrodynamic force calculation [in] env Environmental data [in] time Current simulation time ierr Error flag
- Date
- 16 Mar 2015

◆ getdragforces()
| subroutine, public hydrodynamicsmodule::getdragforces | ( | real(dp), dimension(:), intent(inout) | Fd, |
| type(supeltype), intent(in) | sup, | ||
| type(hydrodyntype), intent(inout) | hydyn, | ||
| type(environmenttype), intent(in) | env, | ||
| real(dp), intent(in) | time, | ||
| real(dp), intent(in) | dt, | ||
| integer, intent(inout) | ierr | ||
| ) |
Calculates drag (and slam) forces for a (partly) submerged body.
- Parameters
-
Fd Damping forces at the centre of gravity due to drag and slam [in] sup Superelement to calculate damping forces for hydyn Data for hydrodynamic force calculation [in] env Environmental data [in] time Current simulation time [in] dt Time increment size ierr Error flag
- Date
- 8 Jul 2008
◆ getmorisonforces()
| subroutine, public hydrodynamicsmodule::getmorisonforces | ( | character(len=*), intent(in) | beamId, |
| type(triadptrtype), dimension(:), intent(in) | triads, | ||
| real(dp), dimension(:,:), intent(in) | supTr, | ||
| real(dp), dimension(:), intent(in) | urd, | ||
| real(dp), dimension(:), intent(in) | urdd, | ||
| real(dp), dimension(:), intent(inout) | Q, | ||
| real(dp), dimension(:,:), intent(out) | eMa, | ||
| real(dp), dimension(:,:), intent(out) | eCd, | ||
| type(hydrodyntype), intent(inout) | hydyn, | ||
| type(environmenttype), intent(inout) | env, | ||
| real(dp), intent(in) | time, | ||
| integer, intent(in) | istep, | ||
| integer, intent(in) | iter, | ||
| integer, intent(out) | ierr | ||
| ) |
Calculates Morison force contributions for a two-noded beam element.
- Parameters
-
[in] beamId ID string of the beam element used in feedback messages [in] triads Triads connected to the beam elements [in] supTr Position matrix for the beam element [in] urd Nodal velocities in local coordinates [in] urdd Nodal accelerations in local coordinates Q External nodal forces with added mass, drag and buoyancy terms [out] eMa Element added mass matrix [out] eCd Element damping matrix due to drag hydyn Data for hydrodynamic force calculation env Environmental data [in] time Current simulation time [in] istep Time increment counter [in] iter Iteration counter [out] ierr Error flag
The inertia- and damping forces due to added mass and drag are calculated for a two-noded element assuming a circular cross section. The corresponding left-hand side matrix contributions are also calculated. Buoyancy forces are also calculated, but no load-correction stiffness.
- Date
- 27 Mar 2009

◆ getseastate()
| subroutine, public hydrodynamicsmodule::getseastate | ( | type(environmenttype), intent(in) | env, |
| real(dp), intent(in) | time, | ||
| real(dp), dimension(3), intent(in) | Xg, | ||
| real(dp), dimension(:), intent(out) | sea, | ||
| integer, intent(out) | stat | ||
| ) |
Evaluates the sea state at the given point and time.
- Parameters
-
[in] env Environmental data [in] time Current simulation time [in] Xg Global coordinates of sea kinematics evaluation point [out] sea Sea kinematics state at current point. sea(1:3) = Particle velocity at point Xg in global coordinates. sea(4:6) = Particle acceleration at point Xg in global coordinates. sea(7) = Dynamic pressure at point Xg in global coordinates. [out] stat Status flag (negative on error exit)
- Date
- 29 Jun 2015
◆ getwaveelevation()
| real(dp) function, public hydrodynamicsmodule::getwaveelevation | ( | type(environmenttype), intent(in) | env, |
| real(dp), dimension(3), intent(in) | Xg, | ||
| real(dp), intent(in) | time, | ||
| integer, intent(out) | stat | ||
| ) |
Returns the wave height at the given point and time.
- Parameters
-
[in] env Environmental data [in] Xg Global coordinates of sea kinematics evaluation point [in] time Current simulation time [out] stat Status flag (negative on error exit)
- Date
- 8 Feb 2013
◆ initfluidmotions()
| subroutine, public hydrodynamicsmodule::initfluidmotions | ( | real(dp), intent(in) | time, |
| type(environmenttype), intent(in) | env, | ||
| type(triadtype), dimension(:), intent(in) | triads, | ||
| type(supeltype), dimension(:), intent(in) | sups, | ||
| integer, intent(out) | ierr | ||
| ) |
Initializes the fluid particle motion cache for all triads in water.
- Parameters
-
[in] time Current simulation time [in] env Environmental data [in] triads All triads in the model [in] sups All superelements in the model [out] ierr Error flag
- Date
- 30 Jun 2010
◆ initiatehydrodynbodies()
| subroutine, public hydrodynamicsmodule::initiatehydrodynbodies | ( | type(supeltype), dimension(:), intent(inout) | sups, |
| type(userdefeltype), dimension(:), intent(inout) | elms, | ||
| type(environmenttype), intent(in) | env, | ||
| logical, intent(in) | restart, | ||
| integer, intent(out) | ierr | ||
| ) |
Initializes all hydrodynamic bodies in the model.
- Parameters
-
sups All superelements in the model elms All user-defined elements in the model [in] env Environmental data [in] restart If .true., this is a restart simulation [out] ierr Error flag
- Date
- 12 Aug 2008
◆ updatehydrodynamicsatconvergence()
|
private |
Updates the HydroDynType object after convergence has been achieved.
- Parameters
-
hydyn Data for hydrodynamic force calculation [in] supTr Position matrix for the superelement to update for [out] ierr Error flag
- Date
- 11 Aug 2008
◆ updatehydrodynbody()
| subroutine hydrodynamicsmodule::updatehydrodynbody | ( | type(hydrodyntype), intent(inout) | hydyn, |
| type(triadptrtype), dimension(:), intent(in) | triads, | ||
| real(dp), dimension(:,:), intent(in) | supTr, | ||
| real(dp), intent(in) | sLev, | ||
| real(dp), dimension(3), intent(in) | gravity, | ||
| real(dp), intent(out), optional | g, | ||
| real(dp), dimension(2), intent(out), optional | wb, | ||
| integer, intent(out) | ierr | ||
| ) |
Updates the hydrodynamic body quantities.
- Parameters
-
hydyn Data for hydrodynamic force calculation [in] triads Triads on the superelement to update hydrodynamics for [in] supTr Superelement position matrix [in] sLev Current sea level [in] gravity Global gravitation vector [out] g Gravitation constant [out] wb Buoyancy weight factors for two-noded beams [out] ierr Error flag
- Date
- 12 Aug 2008

◆ watersurfacenormal()
| real(dp) function hydrodynamicsmodule::watersurfacenormal | ( | real(dp), dimension(3), intent(out) | normal, |
| real(dp), dimension(3), intent(in) | gravity, | ||
| real(dp), dimension(:,:), intent(in), optional | Tlg | ||
| ) |
Returns the water surface normal vector in local coordinate system.
- Parameters
-
[out] normal Unit normal vector for the water surface [in] gravity Global gravitation vector [in] Tlg Local to global transformation matrix (optional)
- Returns
- The gravitation constant
- Date
- 27 Mar 2009

Variable Documentation
◆ calcwmotion
|
private |
Have calculated motions?
◆ eps_p
|
private |
Zero tolerance.
◆ watermotion
|
private |
Fluid particle motions.