Module with subroutines for superelement mass matrix correction. More...
Functions/Subroutines | |
| subroutine | mmcrigaccelvectors (supel, rotCenter, rigVdd) |
| Generates the 6 rigid body acceleration vectors for a superelement. More... | |
| subroutine | mmcrigidmassproperties (supel, ierr) |
| Calculates the rigid body mass properties for a superelement. More... | |
| subroutine | mmcinitmassmatrixcorrection (supel, ierr) |
| Initializes the matrix (R^t*R)^-1*R^t for mass matrix correction. More... | |
| subroutine, private | mmcmassmatrixcorrection (supel, elVd, momentError, forceError, radiusVec, ErrNorm, ierr) |
| Calculates the error in the mass matrix. More... | |
| subroutine | mmcmassmatrixwarning (supel, uld, ierr) |
| Checks the error in the mass matrix and print warning if increasing. More... | |
| real(dp) function, dimension(sup%ntotdofs) | mmcgetmasstorquecorrection (sup) |
| Returns a correction force vector that accounts for the mass matrix error. More... | |
Detailed Description
Module with subroutines for superelement mass matrix correction.
This module contains some subroutines for calculating mass matrix corrections for superelements what undergo high-speed rotations.
Function/Subroutine Documentation
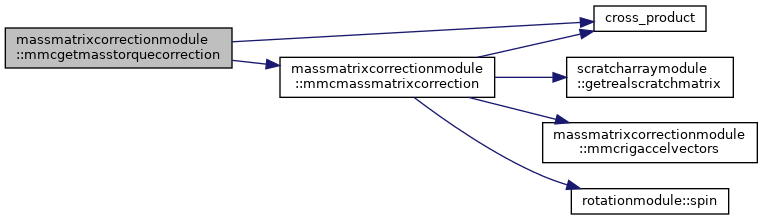
◆ mmcgetmasstorquecorrection()
| real(dp) function, dimension(sup%ntotdofs) massmatrixcorrectionmodule::mmcgetmasstorquecorrection | ( | type(supeltype), intent(in) | sup | ) |
Returns a correction force vector that accounts for the mass matrix error.
- Parameters
-
[in] sup The superelement to calculate for correction vector for
- Date
- 1990s
- Date
- 21 Jan 2004
Here is the call graph for this function:
Here is the caller graph for this function:

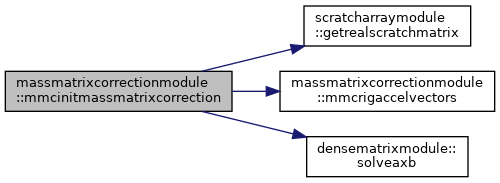
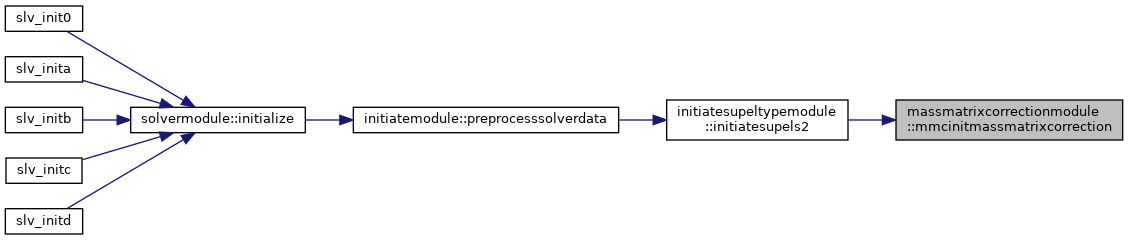
◆ mmcinitmassmatrixcorrection()
| subroutine massmatrixcorrectionmodule::mmcinitmassmatrixcorrection | ( | type(supeltype), intent(inout) | supel, |
| integer, intent(out) | ierr | ||
| ) |
Initializes the matrix (R^t*R)^-1*R^t for mass matrix correction.
- Parameters
-
supel The superelement to calculate the rtr_r matrix for [out] ierr Error flag
- Date
- 1990s
- Date
- 21 Jan 2004
Here is the call graph for this function:
Here is the caller graph for this function:
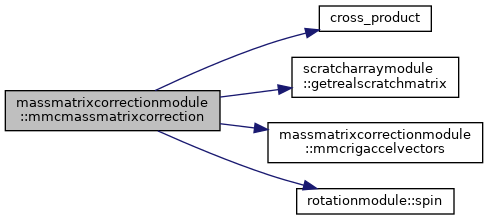
◆ mmcmassmatrixcorrection()
|
private |
Calculates the error in the mass matrix.
- Parameters
-
[in] supel The superelement to calculate the mass matrix error for [in] elVd Superelement velocity vector in local axis directions [out] momentError Torque error estimate for the superelement [out] forceError Force error estimate for the superelement [out] radiusVec Vector from axis of rotation to center of gravity [out] ErrNorm Error norms [out] ierr Error flag
- Date
- 1990s
- Date
- 21 Jan 2004
Here is the call graph for this function:
Here is the caller graph for this function:

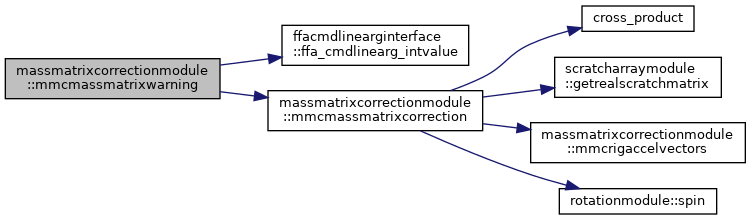
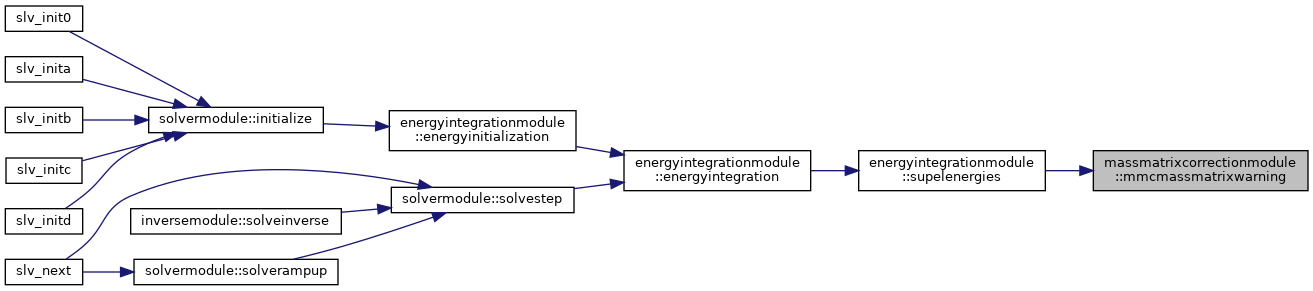
◆ mmcmassmatrixwarning()
| subroutine massmatrixcorrectionmodule::mmcmassmatrixwarning | ( | type(supeltype), intent(inout) | supel, |
| real(dp), dimension(:), intent(in) | uld, | ||
| integer, intent(out) | ierr | ||
| ) |
Checks the error in the mass matrix and print warning if increasing.
- Parameters
-
supel The superelement to check mass matrix error for [in] uld Superelement velocity vector in local axis directions [out] ierr Error flag
- Date
- 1990s
- Date
- 21 Jan 2004
Here is the call graph for this function:
Here is the caller graph for this function:
◆ mmcrigaccelvectors()
| subroutine massmatrixcorrectionmodule::mmcrigaccelvectors | ( | type(supeltype), intent(in) | supel, |
| real(dp), dimension(3), intent(in) | rotCenter, | ||
| real(dp), dimension(:,:), intent(out) | rigVdd | ||
| ) |
Generates the 6 rigid body acceleration vectors for a superelement.
- Parameters
-
[in] supel The superelement to generate the acceleration vectors for [in] rotCenter The rotation center of the superelement [out] rigVdd Rigid body acceleration vectors of the superelement
- Date
- Oct 1999
Here is the caller graph for this function:

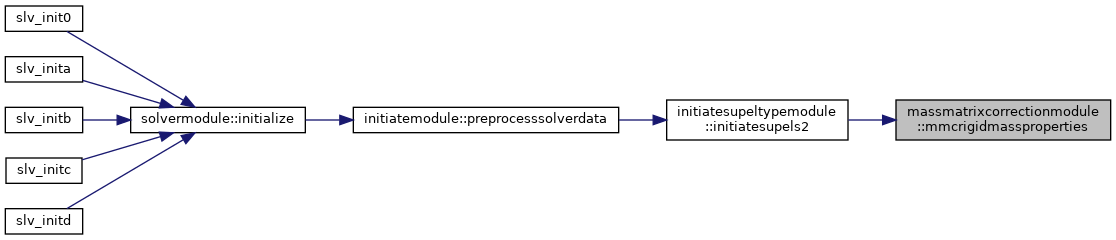
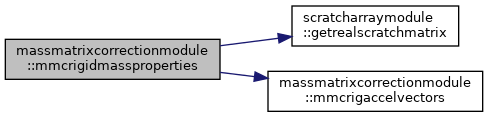
◆ mmcrigidmassproperties()
| subroutine massmatrixcorrectionmodule::mmcrigidmassproperties | ( | type(supeltype), intent(inout) | supel, |
| integer, intent(out) | ierr | ||
| ) |
Calculates the rigid body mass properties for a superelement.
- Parameters
-
supel The superelement to calculate mass properties for [out] ierr Error flag
- Date
- 1 Oct 1997
- Date
- 4 Jun 1998
- Date
- 14 Oct 1999
- Date
- 21 Jan 2004
Here is the call graph for this function:
Here is the caller graph for this function: