Module with subroutines for solution of linear equation systems. More...
Data Types | |
| interface | cssolve |
| Solves the linear system of equations Ax = B. More... | |
Functions/Subroutines | |
| subroutine, private | cssolvea (iop, iopSing, sysMat, rhs, lpu, ierr, eqnInErr, meqnInErr, tolFactorize, scaleOnSing, neq1) |
| Solves the linear system of equations Ax = B. More... | |
| subroutine, private | cssolveb (iop, iopSing, sysMat, rhs, nrhs, lpu, ierr, eqnInErr, meqnInErr, tolFactorize, scaleOnSing, neq1) |
| Solves the linear system of equations Ax = B. More... | |
| subroutine | cssolvesupel (iopSing, sysMat, sysRhs, supElMat, supElRhs, meqn1, meqn2, nrhs, lpu, ierr, Bmatrix, eqnInErr, meqnInErr, tolFactorize, scaleOnSing) |
| Performs the superelement reduction for the equation system. More... | |
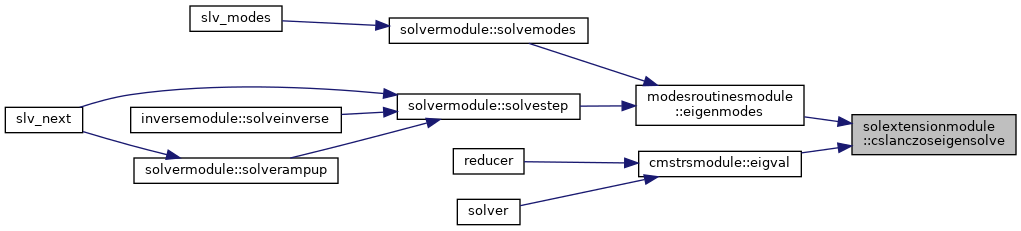
| subroutine | cslanczoseigensolve (aMat, bMat, mip, mop, meqn1, neq, nEigVal, nEigVec, tolerance, shift, eigValues, eigVectors, ipsw, lpu, meqnInErr, ierr) |
| Solves the eigenvalue problem (A + λB) * u = 0. More... | |
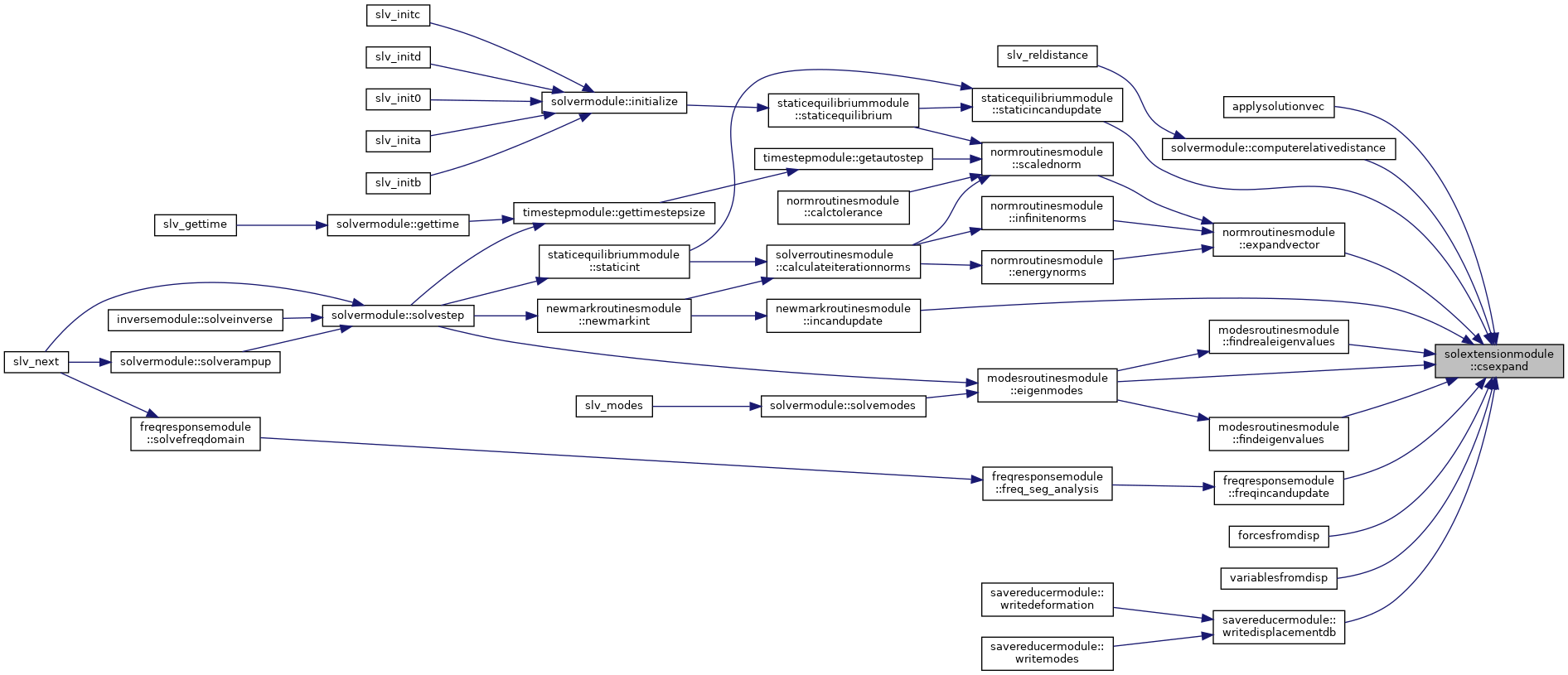
| subroutine | csexpand (samData, sveq, svdof, S1, S2) |
| Expands and rearranges a solution vector. More... | |
Variables | |
| real(dp), parameter, private | epsilon_p = 1.0e-12_dp |
| Default tolerance. More... | |
Detailed Description
Module with subroutines for solution of linear equation systems.
This module contains subroutines for solving the linear system of equations that arise in Fedem solver applications. This includes both direct solution for a set of right-hand-side vectors, the reduction of a system of equations such that only external DOFs are retained, as well as eigenvalue solutions. The module defines an interface between the Fedem solver applications and the various 3rd-party linear algebra packages that are being used.
Function/Subroutine Documentation
◆ csexpand()
| subroutine solextensionmodule::csexpand | ( | type(samtype), intent(in) | samData, |
| real(dp), dimension(:), intent(in) | sveq, | ||
| real(dp), dimension(:), intent(out) | svdof, | ||
| real(dp), intent(in), optional | S1, | ||
| real(dp), intent(in), optional | S2 | ||
| ) |
Expands and rearranges a solution vector.
- Parameters
-
[in] samData Assembly management data [in] sveq Solution vector expressed in equation order [out] svdof Solution vector expressed in nodal point DOF order [in] S1 Scaling factor for the free DOFs (default 1.0) [in] S2 Scaling factor for the specified DOFs (default equal to S1)
This subroutine expands and rearranges a system vector expressed in equation order, into a vector corresponding to nodal point order.
- Date
- Sep 1999
- Date
- Jul 2001
◆ cslanczoseigensolve()
| subroutine solextensionmodule::cslanczoseigensolve | ( | type(sysmatrixtype), intent(inout) | aMat, |
| type(sysmatrixtype), intent(inout) | bMat, | ||
| integer, dimension(:), intent(in) | mip, | ||
| integer, dimension(:), intent(out) | mop, | ||
| integer, dimension(:), intent(in) | meqn1, | ||
| integer, intent(in) | neq, | ||
| integer, intent(in) | nEigVal, | ||
| integer, intent(in) | nEigVec, | ||
| real(dp), dimension(3), intent(inout) | tolerance, | ||
| real(dp), intent(in) | shift, | ||
| real(dp), dimension(:), intent(out) | eigValues, | ||
| real(dp), dimension(:,:), intent(out) | eigVectors, | ||
| integer, intent(in) | ipsw, | ||
| integer, intent(in) | lpu, | ||
| integer(ik), dimension(:), intent(out) | meqnInErr, | ||
| integer, intent(out) | ierr | ||
| ) |
Solves the eigenvalue problem (A + λB) * u = 0.
- Parameters
-
aMat System matrix A bMat System matrix B [in] mip Matrix of input parameters, see LANCZ2 or SPRLAN in SAM [out] mop Matrix of output parameters, see LANCZ2 or SPRLAN [in] meqn1 Matrix of status 1 (internal) equation numbers [in] neq Size of the equation system to solve [in] nEigVal Number of eigenvalues to return [in] nEigVec Number of eigenvectors to return [in] tolerance Array of tolerances, see LANCZ2 or SPRLAN [in] shift Shift value [out] eigValues Computed eigenvalues [out] eigVectors Computed eigenvectors [in] ipsw Print switch for debug output [in] lpu File unit number for res-file output [out] meqnInErr Equation numbers of all singularities detected [out] ierr Error flag
- Date
- Oct 1998
- Date
- Jan 2003
◆ cssolvea()
|
private |
Solves the linear system of equations Ax = B.
This version accepts the right-hand-side vectors rhs to be provided as a 2D neq×nrhs matrix instead of a 1D array.
- See also
- solextensionmodule::cssolveb for detailed parameter description.
◆ cssolveb()
|
private |
Solves the linear system of equations Ax = B.
- Parameters
-
[in] iop Calculation option (see below) [in] iopSing Singularity handling options (see below) sysMat The coefficient matrix A rhs The right-hand-side vector(s) B, solution on output [in] nrhs Number of right-hand-side vectors [in] lpu File unit number for res-file output [out] ierr Error flag [out] eqnInErr Equation number of the first singularity detected [out] meqnInErr Equation numbers of all singularities detected [in] tolFactorize Singularity tolerance [in] scaleOnSing Scaling factor for singular pivot elements [in] neq1 Number of equations to solve for
Basic equations: Ax = B, LDL'x = B, LDy = B, L'x = y. The value on the input argument iop defines which solution step to do:
- = 1 : Factorization (compute L and D in A = LDL')
- = 2 : Factorization and forward reduction (compute L and D in A = LDL' and y in LDy = B)
- = 3 : Factorization, forward reduction and back substitution (compute L and D in A = LDL', y in LDy = B and x in L'x = y)
- = 4 : Forward reduction and back substitution (compute y in LDy = B and x in L'x = y)
- = 5 : Forward reduction only (compute y in LDy = B)
- = 6 : Back substitution only (compute x in L'x = y)
The singularity handling flag iopSing is interpreted as follows:
- > 1 : Do a solve with modified matrix to override singularities
- = 1 : Same as for > 1, but override only the true singularities
- = 0 : Abort if the matrix is singular
- < 0 : Same as for > 0, but suppress all the singular equations
- Date
- Sep 1998
- Date
- Jan 2003
◆ cssolvesupel()
| subroutine solextensionmodule::cssolvesupel | ( | integer, intent(in) | iopSing, |
| type(sysmatrixtype), intent(inout) | sysMat, | ||
| real(dp), dimension(:,:), intent(in) | sysRhs, | ||
| real(dp), dimension(:,:), intent(out) | supElMat, | ||
| real(dp), dimension(:,:), intent(out), target | supElRhs, | ||
| integer, dimension(:), intent(in) | meqn1, | ||
| integer, dimension(:), intent(in) | meqn2, | ||
| integer, intent(in) | nrhs, | ||
| integer, intent(in) | lpu, | ||
| integer, intent(out) | ierr, | ||
| type(diskmatrixtype), intent(inout), optional | Bmatrix, | ||
| integer(ik), intent(out), optional | eqnInErr, | ||
| integer(ik), dimension(:), intent(out), optional | meqnInErr, | ||
| real(dp), intent(in), optional | tolFactorize, | ||
| real(dp), intent(in), optional | scaleOnSing | ||
| ) |
Performs the superelement reduction for the equation system.
- Parameters
-
[in] iopSing Singularity handling options (see below) sysMat The system stiffness matrix [in] sysRhs The system right-hand-side vector(s) [out] supElMat The reduced stiffness matrix, K [out] supElRhs The reduced right-hand-side vector(s), f [in] meqn1 Matrix of status 1 (internal) equation numbers [in] meqn2 Matrix of status 2 (external) equation numbers [in] nrhs Number of right-hand-side vectors [in] lpu File unit number for res-file output [out] ierr Error flag [out] Bmatrix Displacement recovery matrix [out] eqnInErr Equation number of the first singularity detected [out] meqnInErr Equation numbers of all singularities detected [in] tolFactorize Singularity tolerance [in] scaleOnSing Scaling factor for singular pivot elements
A static condensation of the internal (i) degrees of freedom is performed, retaining only the external (e) degrees of freedom, i.e.,
|Kii Kie|*|vi| = |fi| ====> K*ve = f
|Kei Kee| |ve| |fe|
(sysMat) (sysRhs)where
K = Kee - Kei*(Kii^-1)*Kie (returned in supElMat)
f = fe - Kei*(Kii^-1)*fi (returned in supElRhs)If the Bmatrix is present, it is also returned
B = -(Kii^-1)*Kie
The singularity handling flag iopSing is interpreted as follows:
- > 1 : Do a solve with modified matrix to override singularities
- = 1 : Same as for > 1, but override only the true singularities
- = 0 : Abort if the matrix is singular
- Date
- Nov 1998
- Date
- Jan 2003

Variable Documentation
◆ epsilon_p
|
private |
Default tolerance.