Module with utility subroutines for strain- and stress calculation. More...
Functions/Subroutines | |
| subroutine | principlestrains2d (epsC, eps1, eps2, gamma, alpha1, alphaGamma) |
| Calculation of principal strains in 2D. More... | |
| subroutine | principlestresses2d (sigC, sig1, sig2, tau, alpha1, alphaTau) |
| Calculation of principal stresses in 2D. More... | |
| subroutine | straindispcst (nndof, xEl, yEl, zEl, T_el, zPos, B_el) |
| Computes strain-displacement matrix for constant strain triangle. More... | |
| subroutine | straindispquad4 (nndof, xEl, yEl, zEl, T_el, xi, eta, zPos, B_el) |
| Computes strain-displacement matrix for the 4-noded quadrilateral. More... | |
| real(dp) function, dimension(3) | getglobalizedx (eZ) |
| Calculates the X-axis direction of the globalized coordinate system. More... | |
| subroutine | getshellelementaxes (nenod, X, Y, Z, V1, V2, V3, lpu, ierr, doGlobalize) |
| Computes the local element axes for a thin shell element. More... | |
| subroutine | getshellstresstrans (eX, eZ, T, lpu, ierr) |
| Computes the stress transformation matrix for a thin shell element. More... | |
Detailed Description
Module with utility subroutines for strain- and stress calculation.
Function/Subroutine Documentation
◆ getglobalizedx()
| real(dp) function, dimension(3) strainandstressutilitiesmodule::getglobalizedx | ( | real(dp), dimension(3), intent(in) | eZ | ) |
Calculates the X-axis direction of the globalized coordinate system.
- Parameters
-
[in] eZ Local Z-axis (normal vector) of the shell surface
- Returns
- Globalized X-axis direction vector for the shell surface
This function computes the vector V1 defined by the projection of the global X-axis onto the plane defined by the normal vector eZ.
- Date
- 30 Nov 2000

◆ getshellelementaxes()
| subroutine strainandstressutilitiesmodule::getshellelementaxes | ( | integer, intent(in) | nenod, |
| real(dp), dimension(nenod), intent(in) | X, | ||
| real(dp), dimension(nenod), intent(in) | Y, | ||
| real(dp), dimension(nenod), intent(in) | Z, | ||
| real(dp), dimension(3), intent(out) | V1, | ||
| real(dp), dimension(3), intent(out) | V2, | ||
| real(dp), dimension(3), intent(out) | V3, | ||
| integer, intent(in) | lpu, | ||
| integer, intent(out) | ierr, | ||
| logical, optional | doGlobalize | ||
| ) |
Computes the local element axes for a thin shell element.
- Parameters
-
[in] nenod Number of element nodes (3 or 4) [in] X Global X-coordinates for the element [in] Y Global Y-coordinates for the element [in] Z Global Z-coordinates for the element [out] V1 Direction of local X-axis for the element [out] V2 Direction of local Y-axis for the element [out] V3 Direction of local Z-axis for the element [in] lpu File unit number for res-file output [out] ierr Error flag [in] doGlobalize If .true., the globalized shell axes are computed
The local-to-global transformation matrix is then T = [V1,V2,V3]. Optionally, the globalized shell element axes can be computed instead of the local element axes.
- Date
- 30 Nov 2000

◆ getshellstresstrans()
| subroutine strainandstressutilitiesmodule::getshellstresstrans | ( | real(dp), dimension(3), intent(in) | eX, |
| real(dp), dimension(3), intent(in) | eZ, | ||
| real(dp), dimension(2,2), intent(out) | T, | ||
| integer, intent(in) | lpu, | ||
| integer, intent(out) | ierr | ||
| ) |
Computes the stress transformation matrix for a thin shell element.
- Parameters
-
[in] eX X-axis of the element coordinate system [in] eZ Z-axis of the element coordinate system [out] T In-plane transformation matrix [in] lpu File unit number for res-file output [out] ierr Error flag
This subroutine computes the 2D transformation matrix from the element coordinate system to the continuous stress output coordinate system for a shell element.
- Date
- 30 Nov 2000

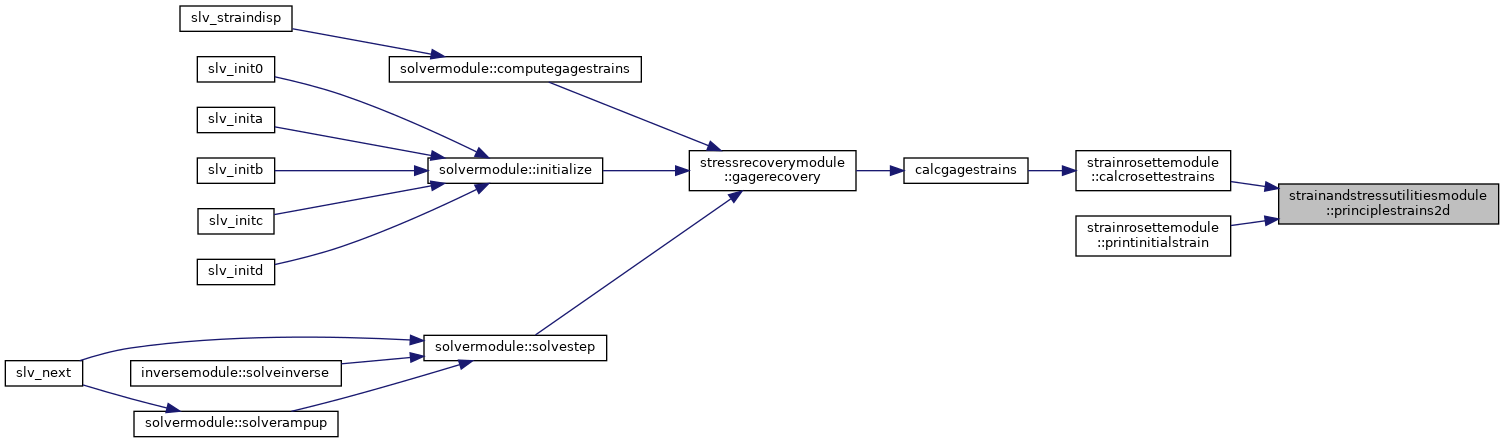
◆ principlestrains2d()
| subroutine strainandstressutilitiesmodule::principlestrains2d | ( | real(dp), dimension(3), intent(in) | epsC, |
| real(dp), intent(out) | eps1, | ||
| real(dp), intent(out) | eps2, | ||
| real(dp), intent(out) | gamma, | ||
| real(dp), intent(out), optional | alpha1, | ||
| real(dp), intent(out), optional | alphaGamma | ||
| ) |
Calculation of principal strains in 2D.
- Parameters
-
[in] epsC Strain components [out] eps1 Maximum principal strain [out] eps2 Minimum principal strain [out] gamma Maximum shear strain [out] alpha1 Angle between local X-axis and direction of eps1 [out] alphaGamma Angle between local X-axis and direction of gamma
This subroutine computes the principle strains, max shear strain, angle to the (max) principle strain and angle to the max shear strain. Using Mohr's circle interpretation.
- Note
- The shear strain epsC(3) is assumed to be the quantity γxy = εxy + εyx where εxy = εyx is the tensorial shear strain component.
- Date
- 13 Apr 2000
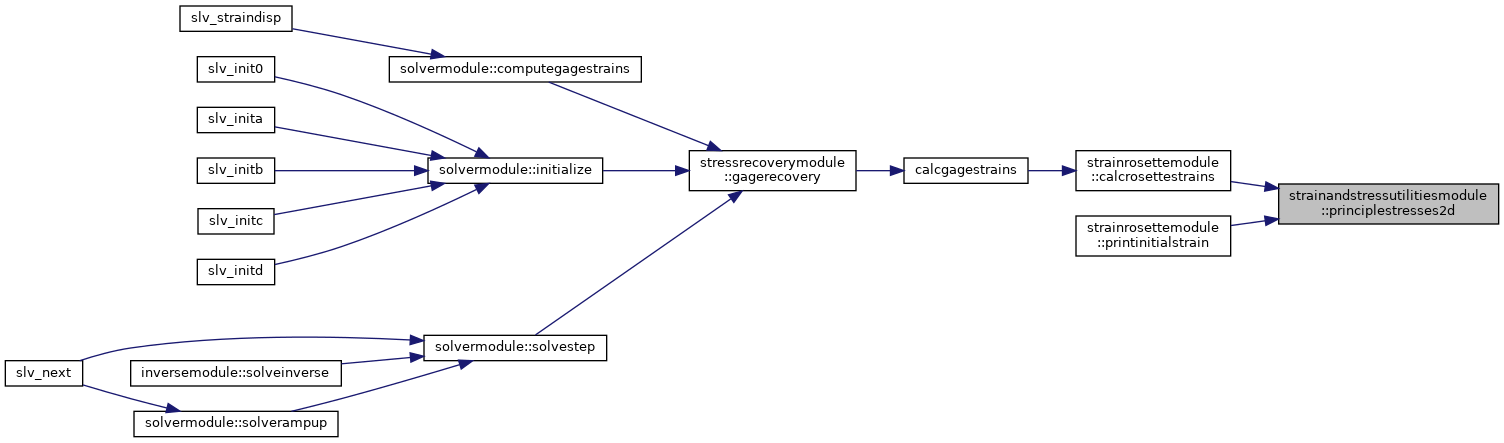
◆ principlestresses2d()
| subroutine strainandstressutilitiesmodule::principlestresses2d | ( | real(dp), dimension(3), intent(in) | sigC, |
| real(dp), intent(out) | sig1, | ||
| real(dp), intent(out) | sig2, | ||
| real(dp), intent(out) | tau, | ||
| real(dp), intent(out), optional | alpha1, | ||
| real(dp), intent(out), optional | alphaTau | ||
| ) |
Calculation of principal stresses in 2D.
- Parameters
-
[in] sigC Stress components [out] sig1 Maximum principal stress [out] sig2 Minimum principal stress [out] tau Maximum shear stress [out] alpha1 Angle between local X-axis and direction of sig1 [out] alphaTau Angle between local X-axis and direction of tau
This subroutine computes the principle stresses, max shear stress, angle to the (max) principle stress and angle to the max shear stress. Using Mohr's circle interpretation.
- Date
- 13 Apr 2000
◆ straindispcst()
| subroutine strainandstressutilitiesmodule::straindispcst | ( | integer, intent(in) | nndof, |
| real(dp), dimension(:), intent(in) | xEl, | ||
| real(dp), dimension(:), intent(in) | yEl, | ||
| real(dp), dimension(:), intent(in) | zEl, | ||
| real(dp), dimension(3,3), intent(in) | T_el, | ||
| real(dp), intent(in) | zPos, | ||
| real(dp), dimension(3,nndof,3), intent(out) | B_el | ||
| ) |
Computes strain-displacement matrix for constant strain triangle.
- Parameters
-
[in] nndof Number of DOFs per nodal point [in] xEl X-coordinates of the element nodes [in] yEl Y-coordinates of the element nodes [in] zEl Z-coordinates of the element nodes [in] T_el Global-to-local transformation matrix for the element [in] zPos Local position of top shell surface w.r.t. the mid-surface [out] B_el Strain-displacement matrix for the element
- Date
- 13 Apr 2000

◆ straindispquad4()
| subroutine strainandstressutilitiesmodule::straindispquad4 | ( | integer, intent(in) | nndof, |
| real(dp), dimension(:), intent(in) | xEl, | ||
| real(dp), dimension(:), intent(in) | yEl, | ||
| real(dp), dimension(:), intent(in) | zEl, | ||
| real(dp), dimension(3,3), intent(in) | T_el, | ||
| real(dp), intent(in) | xi, | ||
| real(dp), intent(in) | eta, | ||
| real(dp), intent(in) | zPos, | ||
| real(dp), dimension(3,nndof,4), intent(out) | B_el | ||
| ) |
Computes strain-displacement matrix for the 4-noded quadrilateral.
- Parameters
-
[in] nndof Number of DOFs per nodal point [in] xEl X-coordinates of the element nodes [in] yEl Y-coordinates of the element nodes [in] zEl Z-coordinates of the element nodes [in] T_el Global-to-local transformation matrix for the element [in] xi First coordinate in domain [-1,1] of evaluation point [in] eta Second coordinate in domain [-1,1] of evaluation point [in] zPos Local position of top shell surface w.r.t. the mid-surface [out] B_el Strain-displacement matrix for the element
- Date
- 13 Apr 2000
