Module with subroutines for superelement calculations. More...
Functions/Subroutines | |
| subroutine | setsupelsvelacc (sups, sam, velGlobal, accGlobal) |
| Extracts local velocities and accelerations for the superelements. More... | |
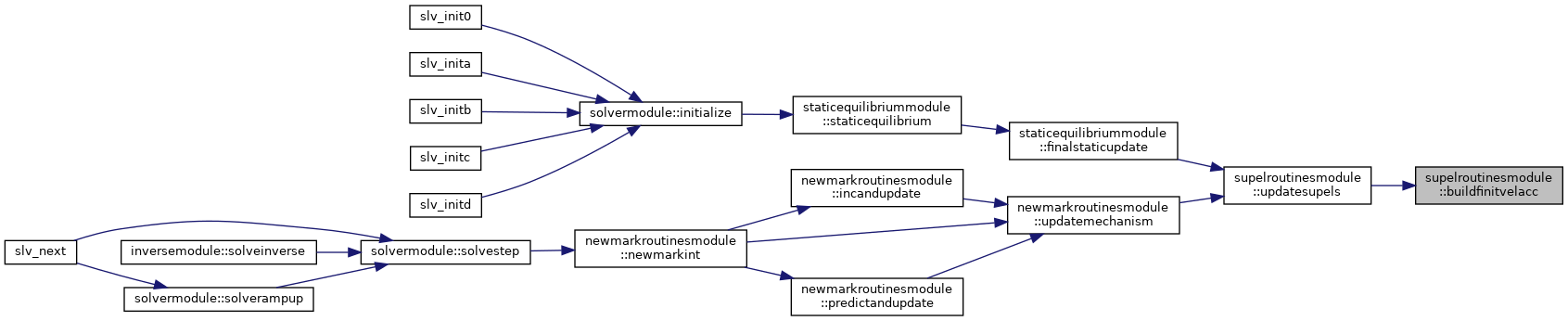
| subroutine | buildfinitvelacc (sup, beta, gamma, h) |
| Calculates deformational velocities and accelerations. More... | |
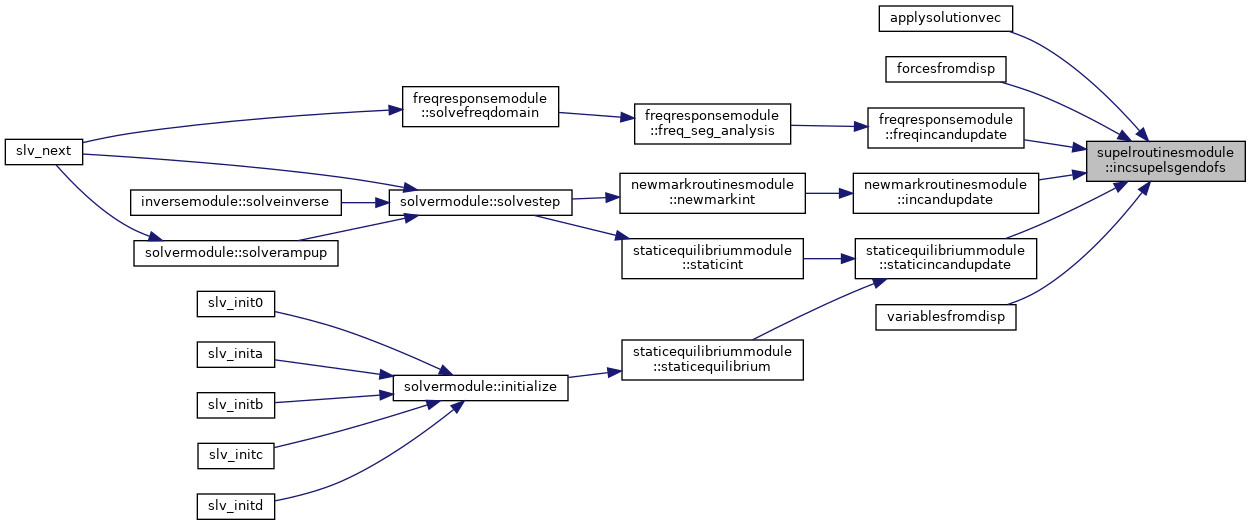
| subroutine | incsupelsgendofs (sups, solinc, useTotalInc) |
| Increments the generalized DOFs for all superelements. More... | |
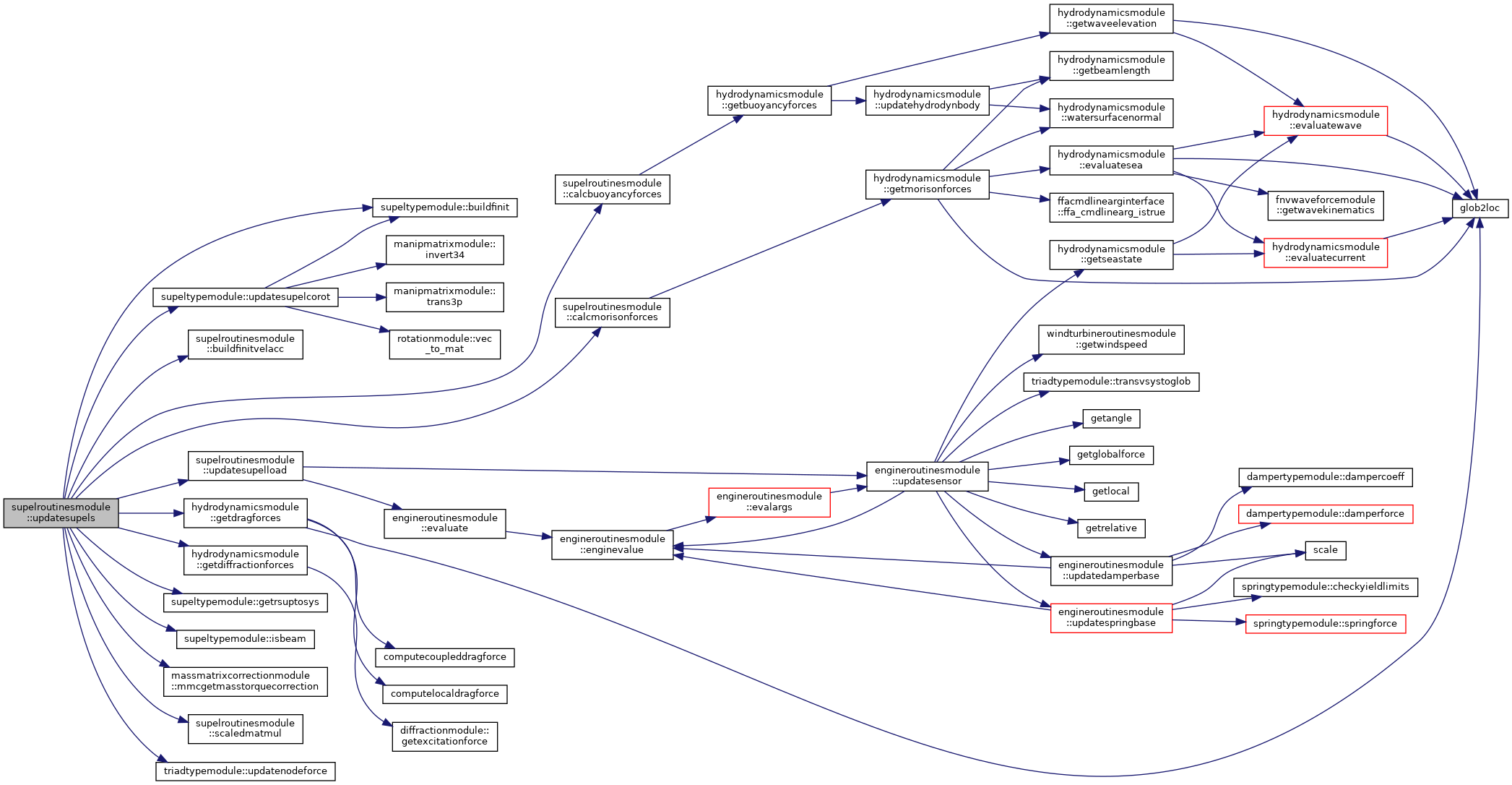
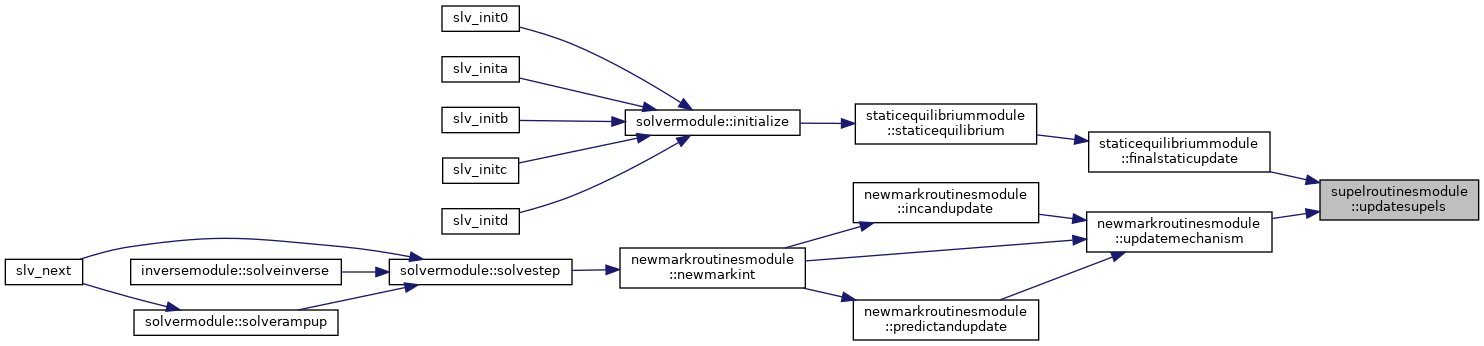
| subroutine | updatesupels (sups, supLoads, env, beta, gamma, time, timeStep, istep, iter, newPositions, ierr) |
| Updates all superelements in the model based on the computed state. More... | |
| subroutine | updatesupelsstatic (sups, supLoads, env, time, iter, linInc, ierr) |
| Updates all superelements in the model based on the computed state. More... | |
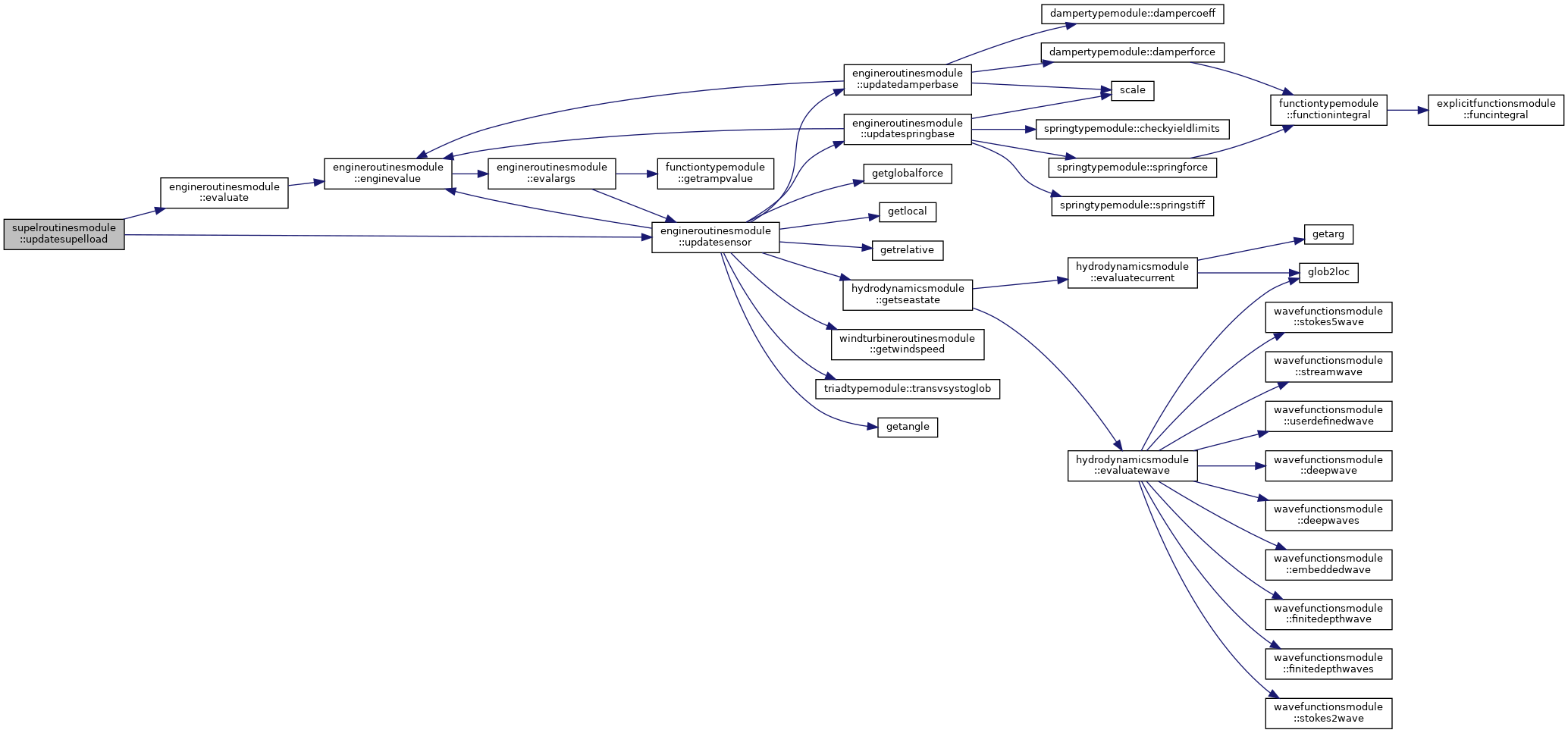
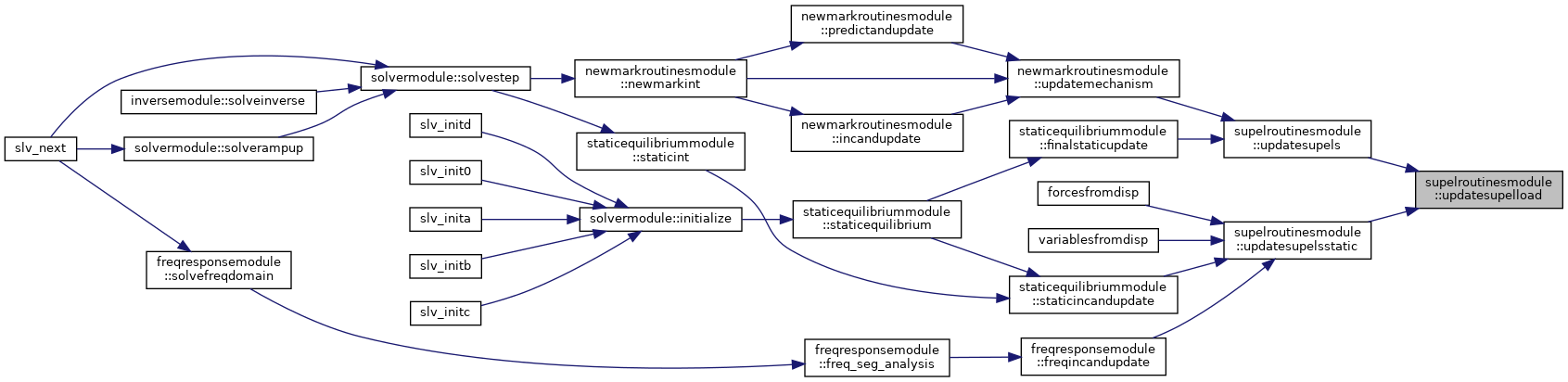
| subroutine, private | updatesupelload (Q, S, supLoad, ierr) |
| Adds the superelement loads to the system external load vector. More... | |
| subroutine | updatesupeldamping (sups, engs, alpha, ierr) |
| Updates the superelement damping matrices. More... | |
| subroutine | updateseaenvironment (env, triads, sups, time, iter, ierr) |
| Updates the current sea state. More... | |
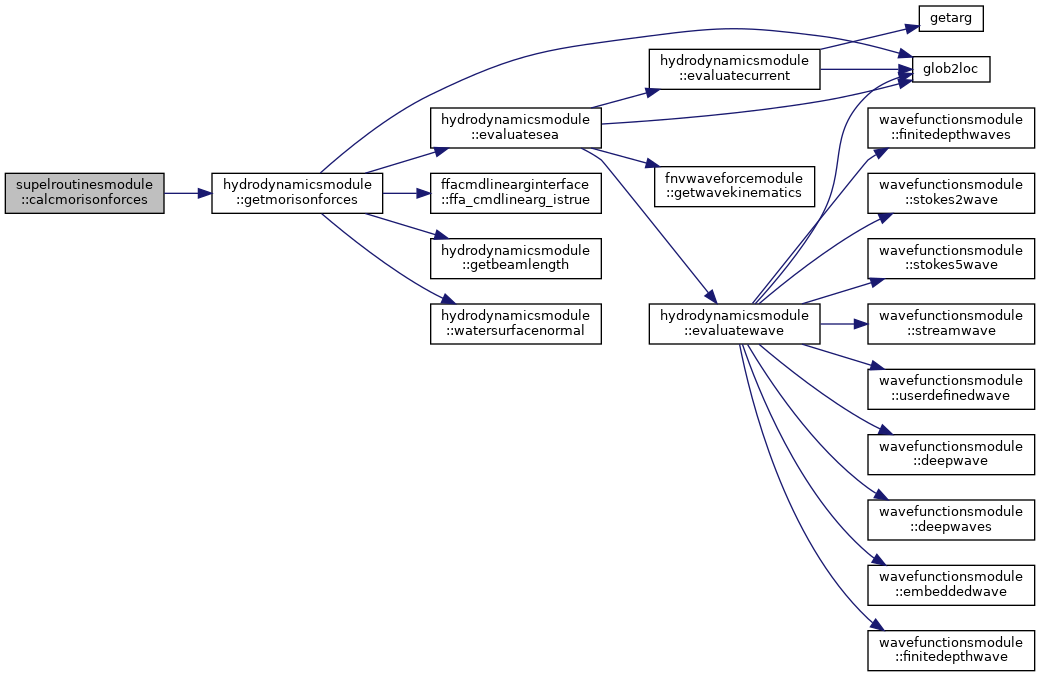
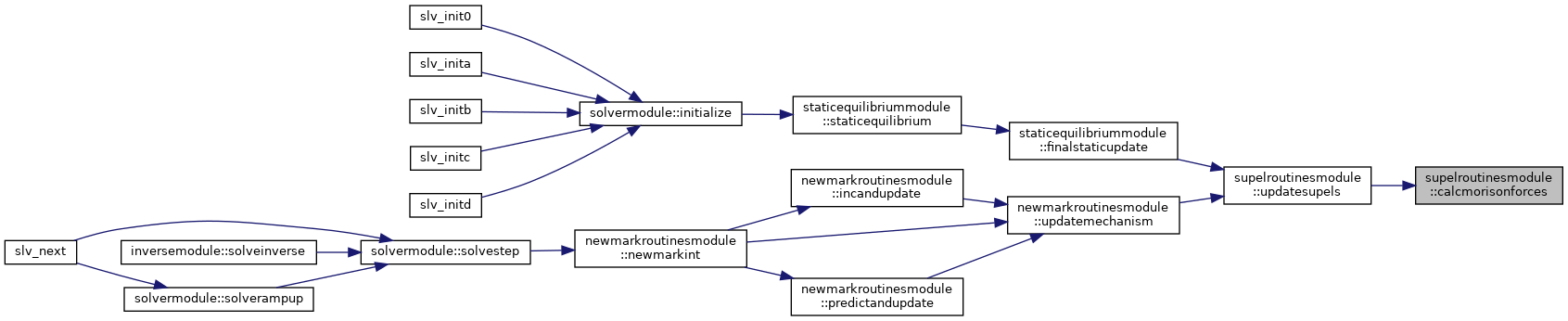
| subroutine, private | calcmorisonforces (sup, env, time, istep, iter, ierr) |
| Calculates Morison force contributions for a two-noded beam element. More... | |
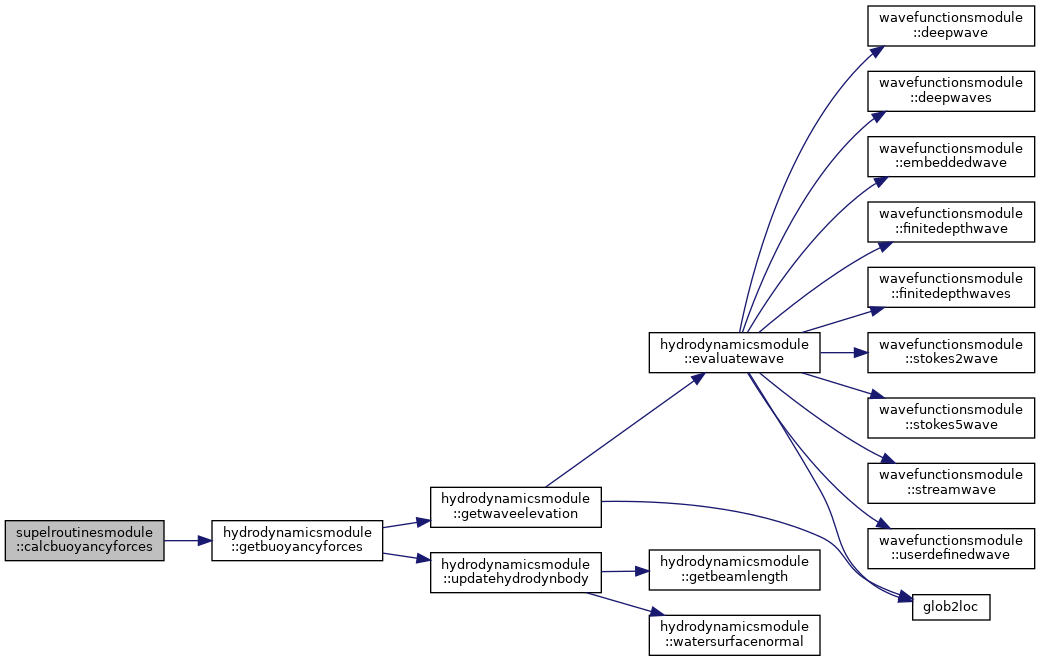
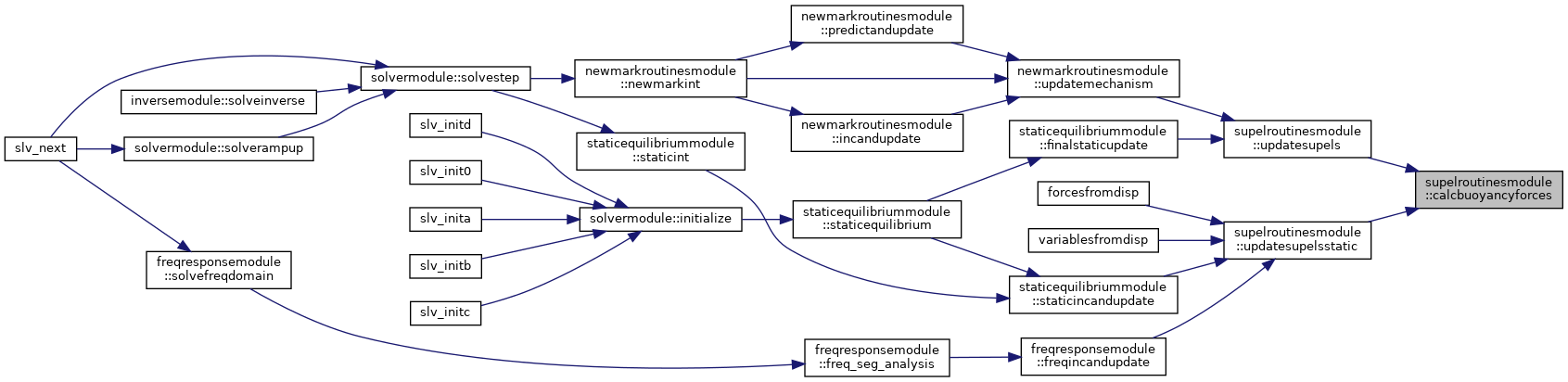
| subroutine, private | calcbuoyancyforces (sup, env, time, iter, ierr) |
| Calculates buoyancy forces and associated load correction stiffness. More... | |
| subroutine | addinsupforces (sam, sups, FSk, FDk, FIk, Qk, RFk, ierr) |
| Adds superelement forces into corresponding system force vectors. More... | |
| subroutine | addinstaticsupforces (sam, sups, FSk, Qk, RFk, ierr) |
| Adds superelement forces into corresponding system force vectors. More... | |
| subroutine | addinsupmat (supMat, sysMat, sup, sam, err, sysRhs, scale) |
| Adds a superelement matrix into the equivalent system matrix. More... | |
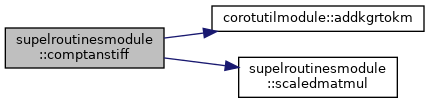
| subroutine | comptanstiff (sup, ierr) |
| Computes the tangential superelement stiffness matrix. More... | |
| subroutine | buildsupnewtonmat (newTangent, scaleM, scaleC, scaleK, sup, ierr) |
| Computes the superelement Newton matrix. More... | |
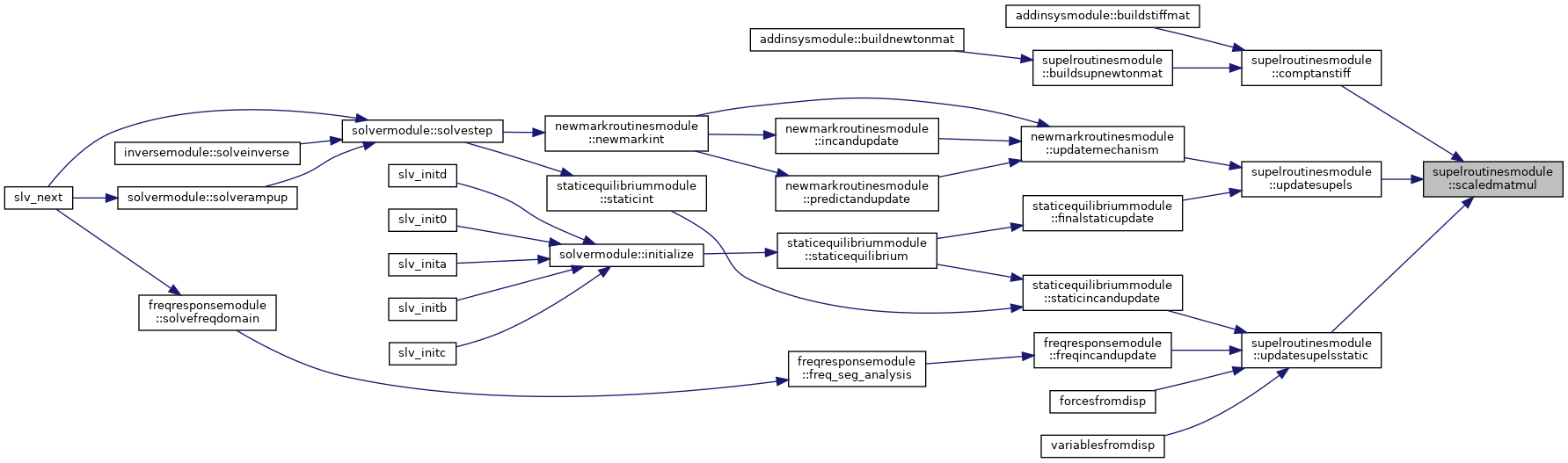
| subroutine, private | scaledmatmul (m, n, alpha, A, X, Y, ldA) |
| Calculates the scaled matrix-vector product Y = α*A*X. More... | |
Detailed Description
Module with subroutines for superelement calculations.
This module contains a set of subroutines for performing various computational tasks on the supeltypemodule::supeltype objects in the model during the dynamics or quasi-static simulation.
Function/Subroutine Documentation
◆ addinstaticsupforces()
| subroutine supelroutinesmodule::addinstaticsupforces | ( | type(samtype), intent(in) | sam, |
| type(supeltype), dimension(:), intent(in) | sups, | ||
| real(dp), dimension(:), intent(inout) | FSk, | ||
| real(dp), dimension(:), intent(inout) | Qk, | ||
| real(dp), dimension(:), intent(inout) | RFk, | ||
| integer, intent(out) | ierr | ||
| ) |
Adds superelement forces into corresponding system force vectors.
- Parameters
-
[in] sam Data for managing system matrix assembly [in] sups All superelements in the model FSk Internal stiffness force vector Qk External force vector (gravitation loads) RFk Reaction forces [out] ierr Error flag
This subroutine only considers the static forces, the stiffness and external forces.
- Date
- 5 June 2002


◆ addinsupforces()
| subroutine supelroutinesmodule::addinsupforces | ( | type(samtype), intent(in) | sam, |
| type(supeltype), dimension(:), intent(in) | sups, | ||
| real(dp), dimension(:), intent(inout) | FSk, | ||
| real(dp), dimension(:), intent(inout) | FDk, | ||
| real(dp), dimension(:), intent(inout) | FIk, | ||
| real(dp), dimension(:), intent(inout) | Qk, | ||
| real(dp), dimension(:), intent(inout) | RFk, | ||
| integer, intent(out) | ierr | ||
| ) |
Adds superelement forces into corresponding system force vectors.
- Parameters
-
[in] sam Data for managing system matrix assembly [in] sups All superelements in the model FSk Internal stiffness force vector FDk Internal damping force vector FIk Internal internal force vector Qk External force vector (gravitation loads) RFk Reaction forces [out] ierr Error flag
- Date
- December 2001


◆ addinsupmat()
| subroutine supelroutinesmodule::addinsupmat | ( | real(dp), dimension(:,:), intent(in) | supMat, |
| type(sysmatrixtype), intent(inout) | sysMat, | ||
| type(supeltype), intent(in) | sup, | ||
| type(samtype), intent(in) | sam, | ||
| integer, intent(out) | err, | ||
| real(dp), dimension(:), intent(inout), optional | sysRhs, | ||
| real(dp), intent(in), optional | scale | ||
| ) |
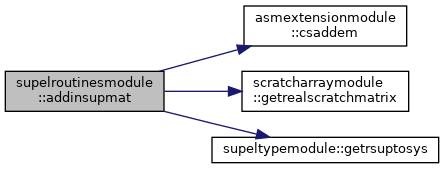
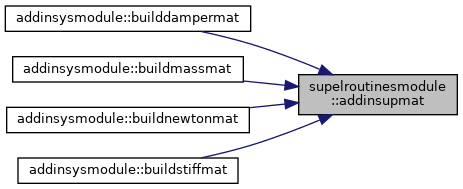
Adds a superelement matrix into the equivalent system matrix.
- Parameters
-
[in] supMat The superelement matrix to add into the system sysMat System coefficient matrix (stiffness, mass, ...) [in] sup The superelement the provided matrix is associated with [in] sam Data for managing system matrix assembly [out] err Error flag sysRhs System right-hand-side vector [in] scale Optional scaling factor for the matrix to add
This subroutine transforms the superelement matrix supMat to the system directions for each DOF associated with it, and then adds it into the system matrix sysMat. If any of the superelement DOFs are prescribed, the associated force contributions are added into the system force vector sysRhs, if present.
- Date
- Januar 1999
◆ buildfinitvelacc()
| subroutine supelroutinesmodule::buildfinitvelacc | ( | type(supeltype), intent(inout) | sup, |
| real(dp), intent(in) | beta, | ||
| real(dp), intent(in) | gamma, | ||
| real(dp), intent(in) | h | ||
| ) |
Calculates deformational velocities and accelerations.
- Parameters
-
sup The superelement to calculate velocity/acceleration for [in] beta Newmark time integration parameter [in] gamma Newmark time integration parameter [in] h Current time increment size
This subroutine integrates the deformational velocities and accelerations based on the Newmark integration parameters and the state at the previous time step.
- Date
- 6 Jul 2006
◆ buildsupnewtonmat()
| subroutine supelroutinesmodule::buildsupnewtonmat | ( | logical, intent(in) | newTangent, |
| real(dp), intent(in) | scaleM, | ||
| real(dp), intent(in) | scaleC, | ||
| real(dp), intent(in) | scaleK, | ||
| type(supeltype), intent(inout) | sup, | ||
| integer, intent(out) | ierr | ||
| ) |
Computes the superelement Newton matrix.
- Parameters
-
[in] newTangent If .true., the tangential stiffness is updated [in] scaleM Mass matrix scaling factor [in] scaleC Damping matrix scaling factor [in] scaleK Stiffness matrix scaling factor sup The superelement to calculate tangent stiffness for [out] ierr Error flag
The Newton matrix is a linear combination of the stiffness-, damping- (if any) and stiffness matrices of the superelement.
- Date
- 10 Apr 2019


◆ calcbuoyancyforces()
|
private |
Calculates buoyancy forces and associated load correction stiffness.
- Parameters
-
sup Superelement to calculate buoyancy forces for env Environmental data [in] time Current simulation time [in] iter Iteration counter ierr Error flag
For a (partly) submerged body.
- Date
- 2 Jul 2008
◆ calcmorisonforces()
|
private |
Calculates Morison force contributions for a two-noded beam element.
- Parameters
-
sup The beam element to calculate Morison forces for env Environmental data [in] time Current simulation time [in] istep Time increment counter [in] iter Iteration counter ierr Error flag
- Date
- 24 Sep 2019
◆ comptanstiff()
| subroutine supelroutinesmodule::comptanstiff | ( | type(supeltype), intent(inout) | sup, |
| integer, intent(out) | ierr | ||
| ) |
Computes the tangential superelement stiffness matrix.
- Parameters
-
sup The superelement to calculate tangent stiffness for [out] ierr Error flag
- Date
- 23 Oct 1997
- Date
- 3 Oct 2003
- Date
- 10 Apr 2019

◆ incsupelsgendofs()
| subroutine supelroutinesmodule::incsupelsgendofs | ( | type(supeltype), dimension(:), intent(inout) | sups, |
| real(dp), dimension(:), intent(in) | solinc, | ||
| logical, intent(in), optional | useTotalInc | ||
| ) |
Increments the generalized DOFs for all superelements.
- Parameters
-
sups All superelements in the model [in] solinc Current global solution increment [in] useTotalInc If .true., update from previous solution state
- Date
- 16 Nov 2001
◆ scaledmatmul()
|
private |
Calculates the scaled matrix-vector product Y = α*A*X.
- Parameters
-
[in] m Number of rows in matrix A [in] n Number of columns in matrix A and length of vector X. [in] alpha Scaling factor, α [in] A The matrix to multiply with [in] X The vector to multiply with [out] Y The output vector [in] ldA Leading dimension of matrix A
This is just a convenience wrapper over the BLAS subroutine DGEMV.
- Date
- 21 Oct 2019
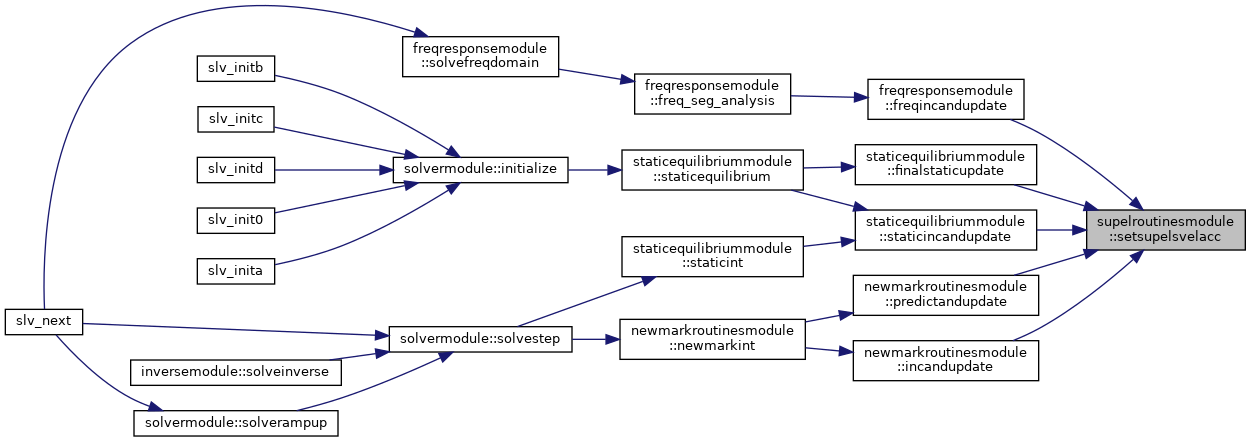
◆ setsupelsvelacc()
| subroutine supelroutinesmodule::setsupelsvelacc | ( | type(supeltype), dimension(:), intent(inout) | sups, |
| type(samtype), intent(in) | sam, | ||
| real(dp), dimension(:), intent(in) | velGlobal, | ||
| real(dp), dimension(:), intent(in) | accGlobal | ||
| ) |
Extracts local velocities and accelerations for the superelements.
- Parameters
-
sups All superelements in the model [in] sam Data for managing system matrix assembly [in] velGlobal Global velocity vector [in] accGlobal Global acceleration vector
This subroutine extracts the local velocities and accelerations (uld and uldd, respectively) from the given global velocity and acceleration vectors for all superelements.
- Date
- 16 Nov 2001

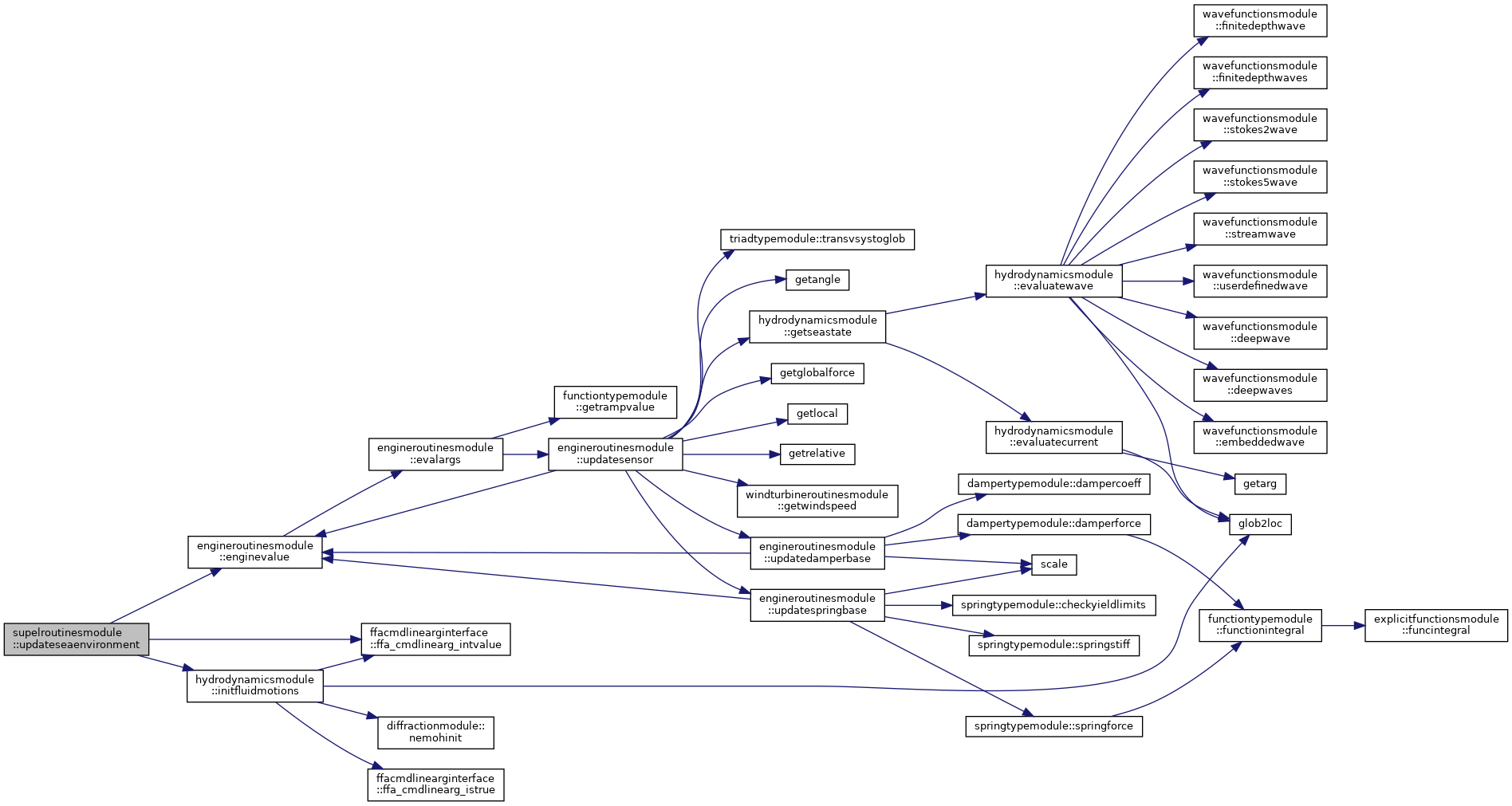
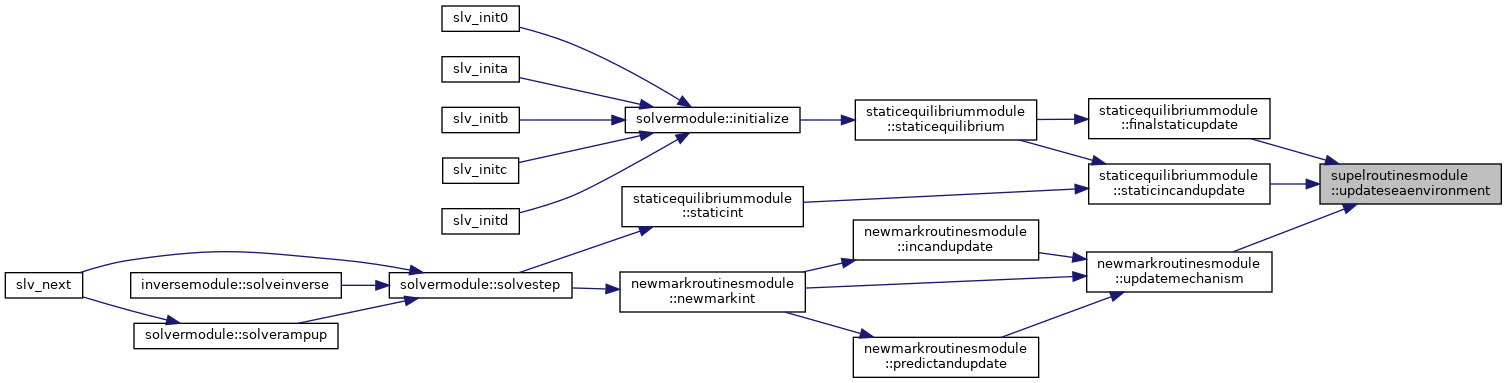
◆ updateseaenvironment()
| subroutine supelroutinesmodule::updateseaenvironment | ( | type(environmenttype), intent(inout) | env, |
| type(triadtype), dimension(:), intent(in) | triads, | ||
| type(supeltype), dimension(:), intent(in) | sups, | ||
| real(dp), intent(in) | time, | ||
| integer, intent(in) | iter, | ||
| integer, intent(out) | ierr | ||
| ) |
Updates the current sea state.
- Parameters
-
env Environmental data [in] triads All triads in the model [in] sups All superelements in the model [in] time Current physical time [in] iter Iteration counter [out] ierr Error flag
- Date
- 23 Oct 2008
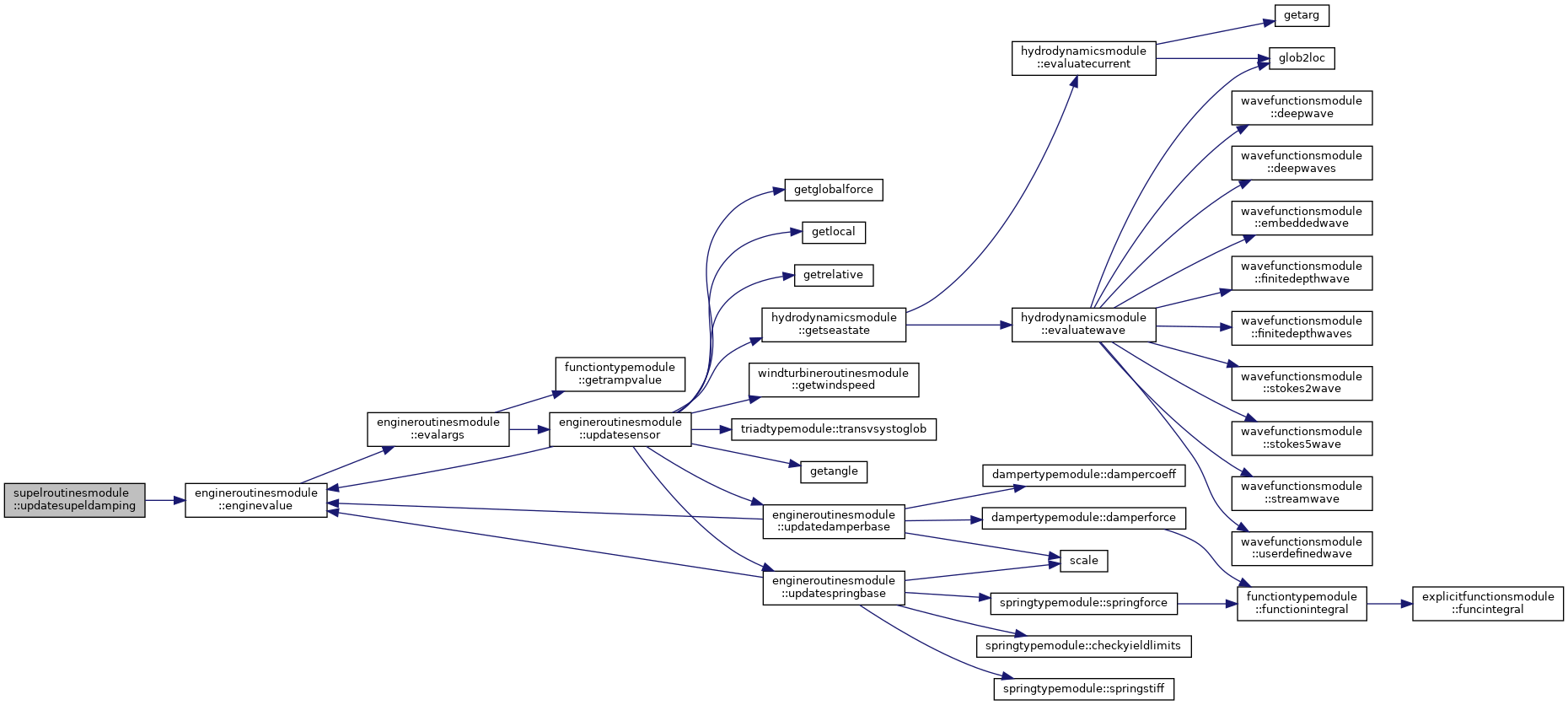
◆ updatesupeldamping()
| subroutine supelroutinesmodule::updatesupeldamping | ( | type(supeltype), dimension(:), intent(inout) | sups, |
| type(enginetype), dimension(:), intent(inout) | engs, | ||
| real(dp), dimension(2), intent(in) | alpha, | ||
| integer, intent(out) | ierr | ||
| ) |
Updates the superelement damping matrices.
- Parameters
-
sups All superelements in the model engs All general functions in the model [in] alpha Global structural damping parameters [out] ierr Error flag
Effective with time-dependent structural damping coefficients. This subroutine also updates the time-dependent stiffness- and mass scaling factors.
- Date
- 1 Dec 2010

◆ updatesupelload()
|
private |
Adds the superelement loads to the system external load vector.
- Parameters
-
Q System external load vector [in] S Normalized superelement load vectors supLoad The superelement load object to assemble ierr Error flag
This subroutine updates the amplitude of the superelement load and adds its contribution to the external force vector of the global system.
- Date
- 8 Apr 2008
◆ updatesupels()
| subroutine supelroutinesmodule::updatesupels | ( | type(supeltype), dimension(:), intent(inout) | sups, |
| type(supelloadtype), dimension(:), intent(inout) | supLoads, | ||
| type(environmenttype), intent(inout) | env, | ||
| real(dp), intent(in) | beta, | ||
| real(dp), intent(in) | gamma, | ||
| real(dp), intent(in) | time, | ||
| real(dp), intent(in) | timeStep, | ||
| integer, intent(in) | istep, | ||
| integer, intent(in) | iter, | ||
| logical, intent(in) | newPositions, | ||
| integer, intent(inout) | ierr | ||
| ) |
Updates all superelements in the model based on the computed state.
- Parameters
-
sups All superelements in the model supLoads All superelement loads in the model env Environmental data [in] beta Newmark time integration parameter [in] gamma Newmark time integration parameter [in] time Current physical time [in] timeStep Current time increment size [in] istep Time increment counter [in] iter Iteration counter [in] newPositions If .true., the position variables have been updated ierr Error flag
This subroutine updates the superelement objects:
- the deflection vector, Finit, is established
- superelement forces are calculated and transformed to system directions
- the total nodal forces are calculated in system directions
- Date
- Sep 1999
- Date
- Nov 2001
- Date
- Feb 2002
- Date
- Apr 2008
- Date
- Aug 2011
◆ updatesupelsstatic()
| subroutine supelroutinesmodule::updatesupelsstatic | ( | type(supeltype), dimension(:), intent(inout) | sups, |
| type(supelloadtype), dimension(:), intent(inout) | supLoads, | ||
| type(environmenttype), intent(inout) | env, | ||
| real(dp), intent(in) | time, | ||
| integer, intent(in) | iter, | ||
| integer, intent(in), optional | linInc, | ||
| integer, intent(inout) | ierr | ||
| ) |
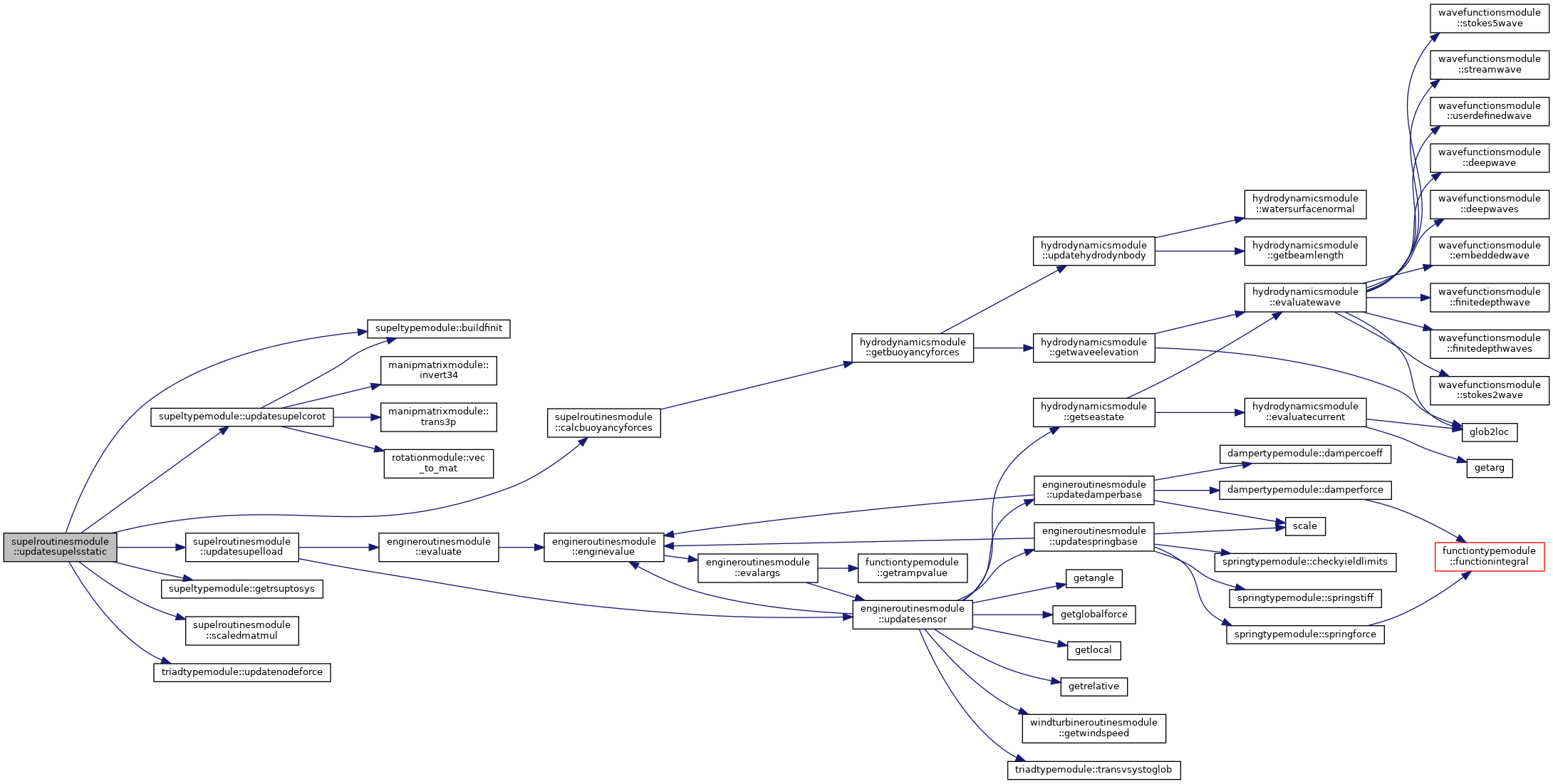
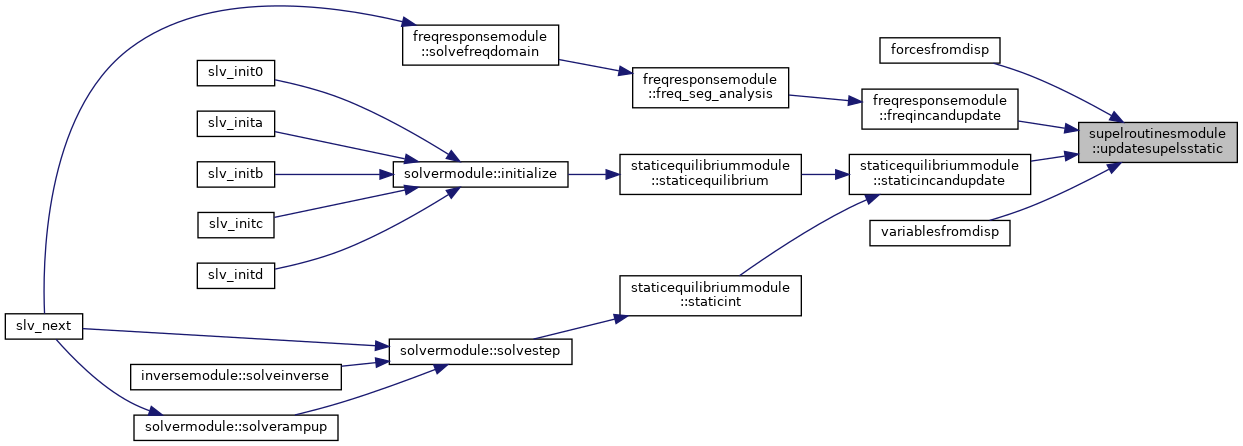
Updates all superelements in the model based on the computed state.
- Parameters
-
sups All superelements in the model supLoads All superelement loads in the model env Environmental data [in] time Current physical time [in] iter Iteration counter [in] linInc Option for linear (1) or incremental (2) deformations ierr Error flag
This subroutine updates the superelement objects statically. It is used in place of supelroutinesmodule::updatesupels in a quasi-static simulation.
- Date
- 5 June 2002