Module with data types representing superelement objects. More...
Data Types | |
| type | generalizeddofs |
| Data type for the generalized DOFs associated with component modes. More... | |
| type | nonlinforcestifftype |
| Data type for the nonlinear force-displacement representation. More... | |
| type | hydrodyntype |
| Data type for the hydrodynamic force calculation. More... | |
| type | recoverytype |
| Data type for the integrated stress recovery. More... | |
| type | supeltype |
| Data type representing a superelement object. More... | |
| type | supelptrtype |
| Data type representing a superelement pointer. More... | |
| interface | getptrtoid |
| Returns pointer to object with specified ID. More... | |
| interface | writeobject |
| Standard routine for writing an object to file. More... | |
| interface | updateatconvergence |
| Updates the state variables pertaining to previous time step. More... | |
| interface | restorefromlaststep |
| Restores the state variables from the last converged time step. More... | |
Functions/Subroutines | |
| type(supeltype) function, pointer, private | getptrtoidsupel (array, id, userId) |
| Returns pointer to (first) superelement with specified ID. More... | |
| subroutine, private | writesupeltype (sup, io, complexity) |
| Standard routine for writing an object to file. More... | |
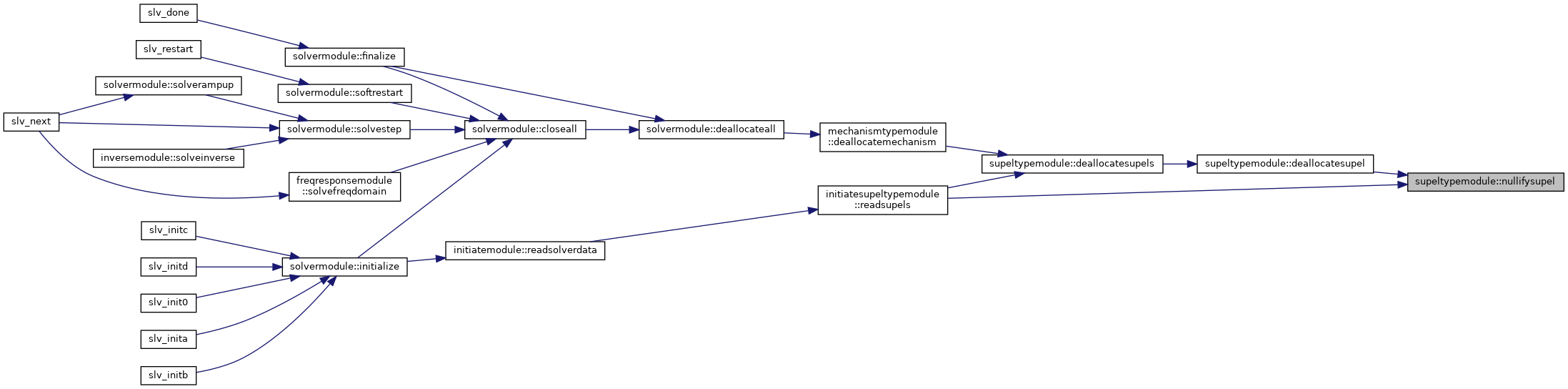
| subroutine | nullifysupel (sup) |
| Initializes a superelement object. More... | |
| subroutine | initiatehydyn (hydyn, MorPar) |
| Initiates the hydrodynamics quantities for a superelement. More... | |
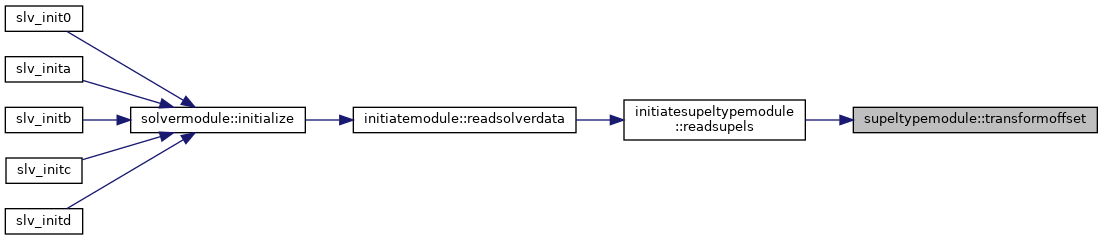
| subroutine | transformoffset (sup, offset, index) |
| Transforms a reference triad offset vector. More... | |
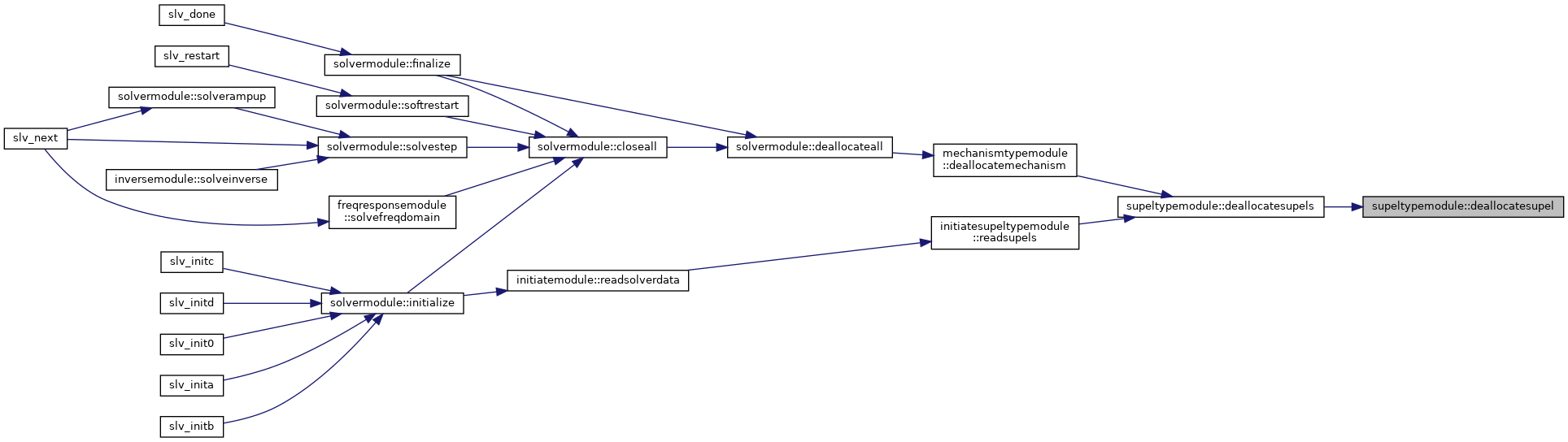
| subroutine | deallocatesupel (sup) |
| Deallocates a superelement object. More... | |
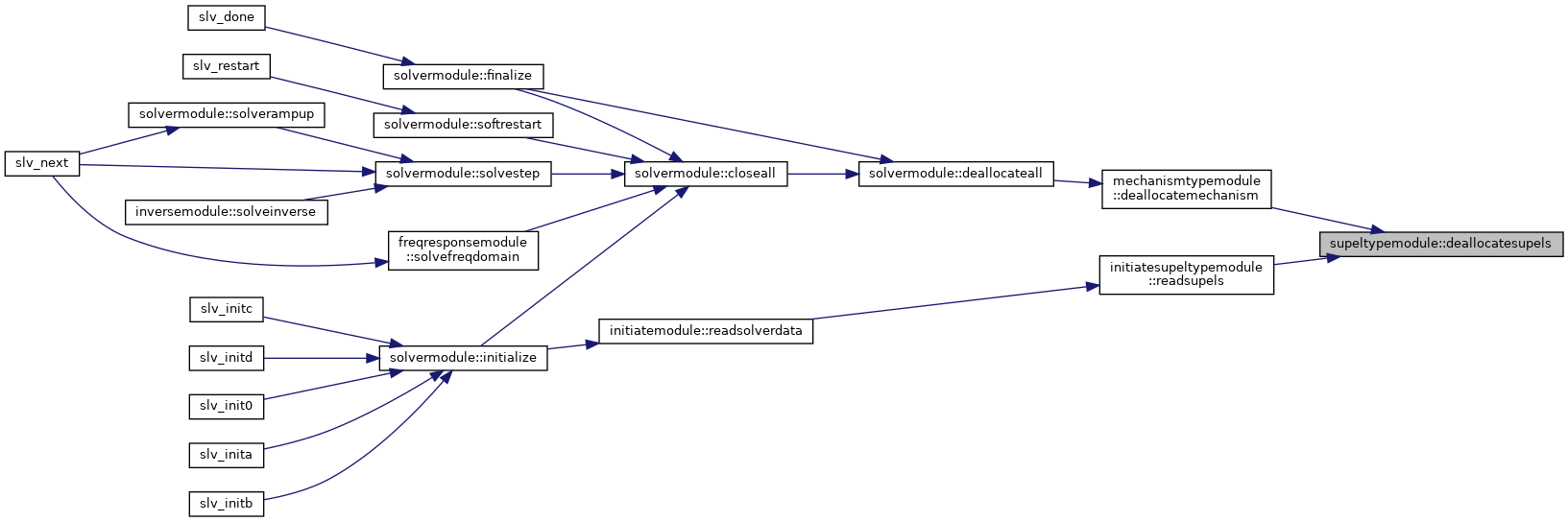
| subroutine | deallocatesupels (sups) |
| Deallocates an array of superelement objects. More... | |
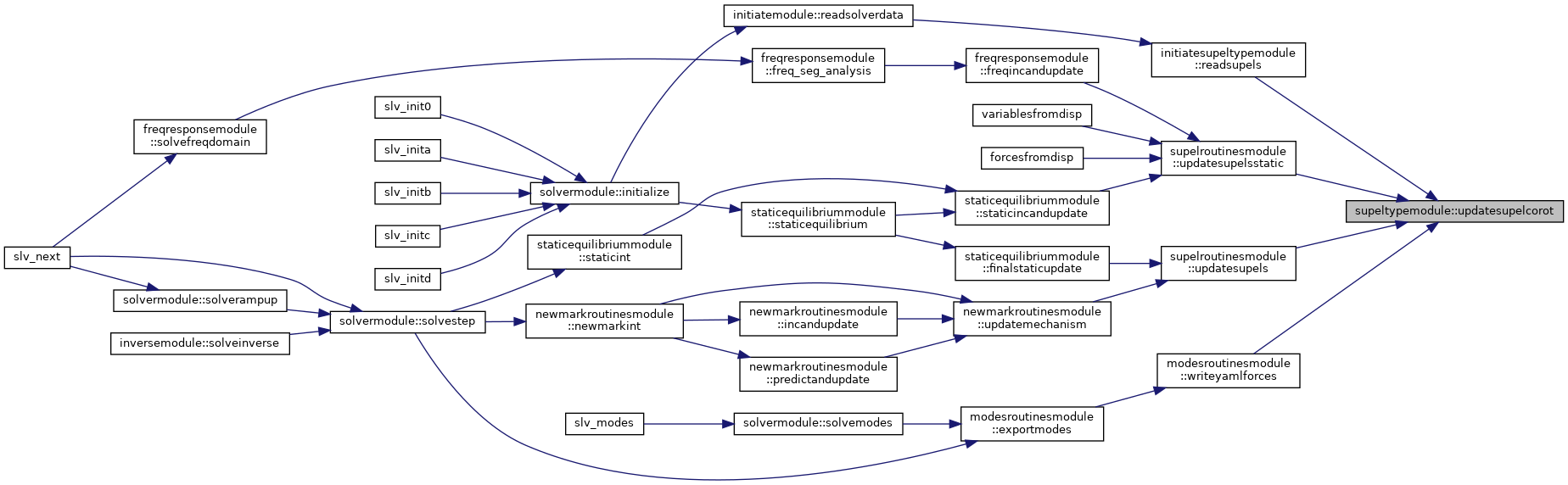
| subroutine | updatesupelcorot (sup, dbgUnit, stat) |
| Updates the co-rotated system for a superelement. More... | |
| subroutine, private | updatepreviousvalues (sup) |
| Updates the state variables pertaining to the previous time step. More... | |
| subroutine, private | restorepreviousvalues (sup) |
| Restores the state variables from the last converged time step. More... | |
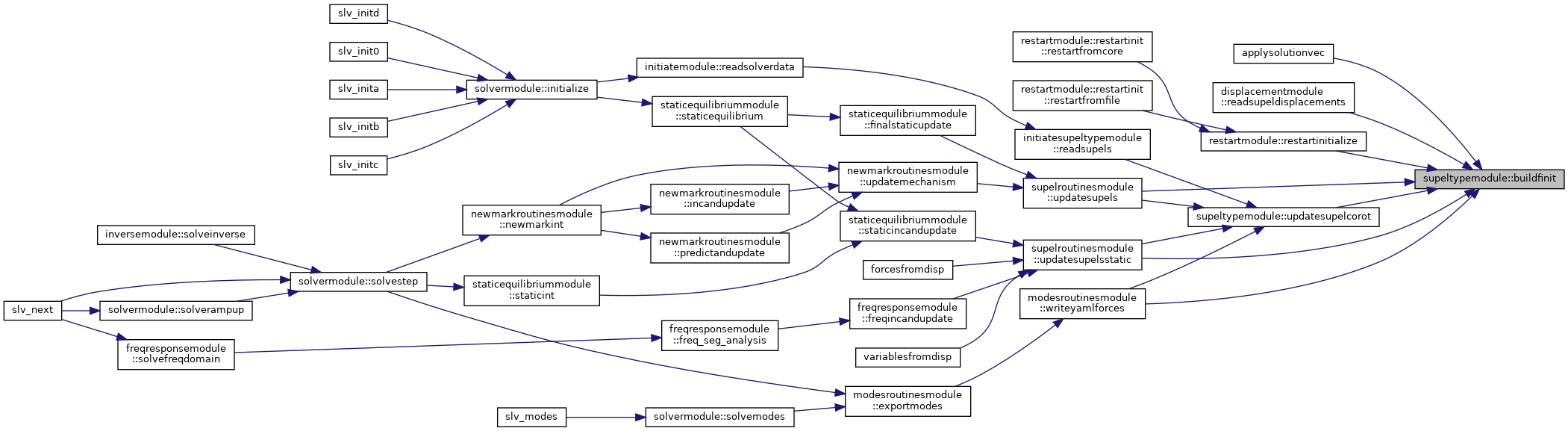
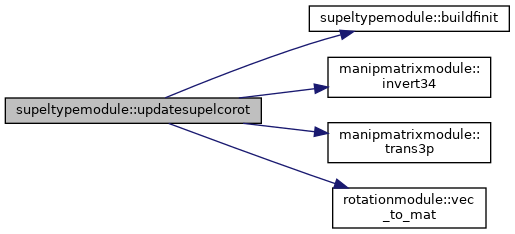
| subroutine | buildfinit (sup) |
| Establishes the deformation vector (finit) for a superelement. More... | |
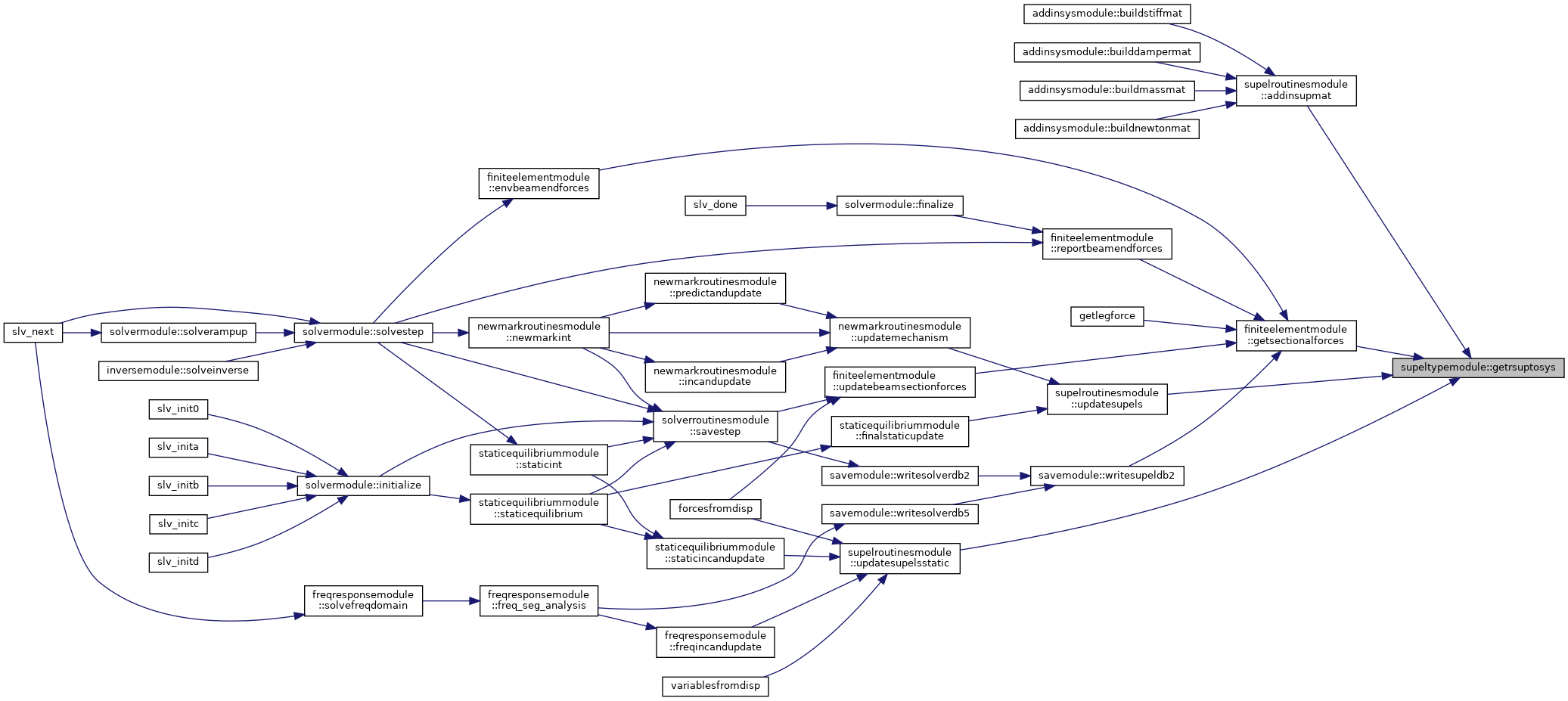
| real(dp) function, dimension(3, 3) | getrsuptosys (sup, n) |
| Returns the transformation matrix to system directions for a triad. More... | |
| subroutine | getsupelsvelacc (sups, velGlobal, accGlobal) |
| Gets current velocity and acceleration from all superelements. More... | |
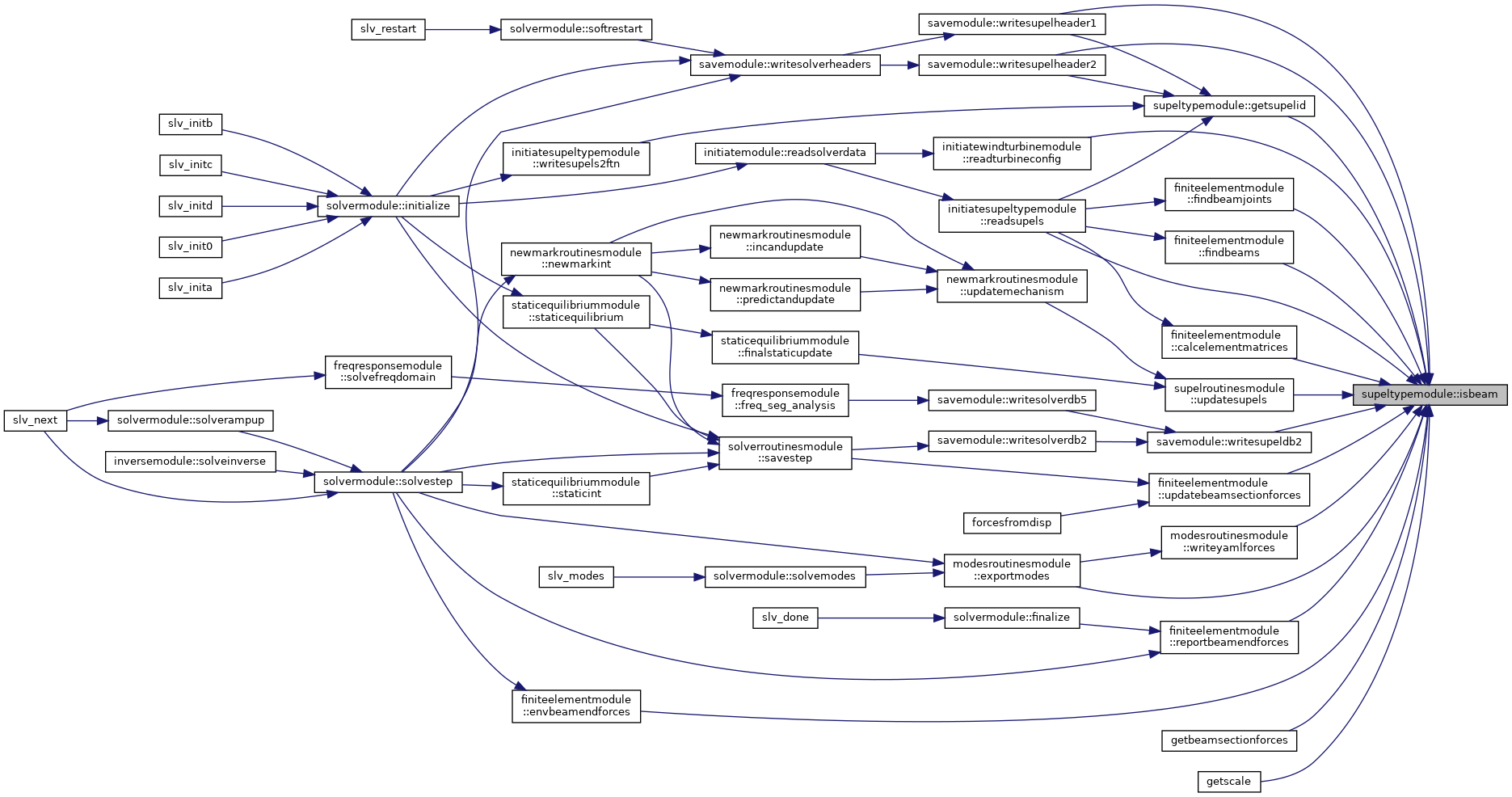
| logical function | isbeam (sup) |
| Returns whether a superelement is a beam element or not. More... | |
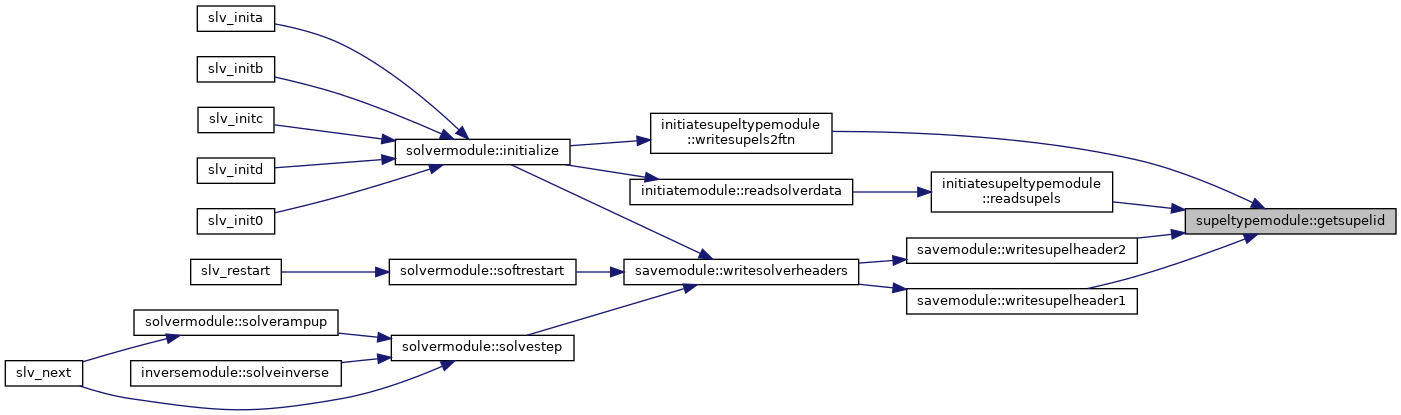
| character(len=5+lid_p) function | getsupelid (sup) |
| Returns the full ID of a superelement. More... | |
Detailed Description
Module with data types representing superelement objects.
The module also contains subroutines for accessing or manipulating the superelement data.
Function/Subroutine Documentation
◆ buildfinit()
| subroutine supeltypemodule::buildfinit | ( | type(supeltype), intent(inout) | sup | ) |
Establishes the deformation vector (finit) for a superelement.
- Parameters
-
sup The supeltypemodule::supeltype object to obtain deformation for
- Date
- 3 Sep 1998
◆ deallocatesupel()
| subroutine supeltypemodule::deallocatesupel | ( | type(supeltype), intent(inout) | sup | ) |
Deallocates a superelement object.
- Parameters
-
sup The supeltypemodule::supeltype object to deallocate
- Date
- 23 Jan 2017

◆ deallocatesupels()
| subroutine supeltypemodule::deallocatesupels | ( | type(supeltype), dimension(:), pointer | sups | ) |
Deallocates an array of superelement objects.
- Parameters
-
sups The supeltypemodule::supeltype objects to deallocate
date 23 Jan 2017

◆ getptrtoidsupel()
|
private |
Returns pointer to (first) superelement with specified ID.
- Parameters
-
[in] array Array of supeltypemodule::supeltype objects to search within [in] id Base ID of the object to search for [in] userId If .true., search for a user ID instead
If the superelement is not found, NULL is returned.
- Date
- 13 Jan 2010
◆ getrsuptosys()
| real(dp) function, dimension(3,3) supeltypemodule::getrsuptosys | ( | type(supeltype), intent(in) | sup, |
| integer, intent(in) | n | ||
| ) |
Returns the transformation matrix to system directions for a triad.
- Parameters
-
[in] sup The supeltypemodule::supeltype object to transform for [in] n 1-based index of the superelement triad to transform for
The returned 3x3 matrix is to be used to transform vectors from the superelement directions to system directions for the n'th connected triad of the superelement.
- Date
- Dec 1998
◆ getsupelid()
| character(len=5+lid_p) function supeltypemodule::getsupelid | ( | type(supeltype), intent(in) | sup | ) |
Returns the full ID of a superelement.
- Parameters
-
[in] sup The supeltypemodule::supeltype object to get the ID for
The full ID of an object consists for of the type name of the object, the user ID and the user description.
- Date
- 15 Sep 2017
◆ getsupelsvelacc()
| subroutine supeltypemodule::getsupelsvelacc | ( | type(supeltype), dimension(:), intent(in) | sups, |
| real(dp), dimension(:), intent(out) | velGlobal, | ||
| real(dp), dimension(:), intent(out) | accGlobal | ||
| ) |
Gets current velocity and acceleration from all superelements.
- Parameters
-
[in] sups All supeltypemodule::supeltype objects in the model [out] velGlobal System velocity vector [out] accGlobal System acceleration vector
- Date
- 1 Nov 2005

◆ initiatehydyn()
| subroutine supeltypemodule::initiatehydyn | ( | type(hydrodyntype), intent(out) | hydyn, |
| real(dp), dimension(:), intent(in), optional | MorPar | ||
| ) |
Initiates the hydrodynamics quantities for a superelement.
- Parameters
-
hydyn Hydrodynamics data container [in] MorPar Morison input parameters
- Date
- 25 Mar 2009

◆ isbeam()
| logical function supeltypemodule::isbeam | ( | type(supeltype), intent(in) | sup | ) |
Returns whether a superelement is a beam element or not.
- Parameters
-
[in] sup The supeltypemodule::supeltype object to check
- Date
- 2 Jul 2013
◆ nullifysupel()
| subroutine supeltypemodule::nullifysupel | ( | type(supeltype), intent(out) | sup | ) |
Initializes a superelement object.
- Parameters
-
sup The supeltypemodule::supeltype object to initialize
- Date
- 13 Oct 2000
◆ restorepreviousvalues()
|
private |
Restores the state variables from the last converged time step.
- Parameters
-
sup The supeltypemodule::supeltype object to restore state for
This subroutine is invoked when doing iteration cut-back.
- Date
- 28 Oct 2008
◆ transformoffset()
| subroutine supeltypemodule::transformoffset | ( | type(supeltype), intent(inout) | sup, |
| real(dp), dimension(3), intent(in) | offset, | ||
| integer, intent(in) | index | ||
| ) |
Transforms a reference triad offset vector.
- Parameters
-
sup The supeltypemodule::supeltype object to transform for [in] offset The reference point offset vector to transform [in] index Which reference point (1, 2 or 3) to transform for
The offset vector is transformed from the superelement coordinate system to the coordinate system of the reference triad itself.
- Date
- 13 Nov 2015
◆ updatepreviousvalues()
|
private |
Updates the state variables pertaining to the previous time step.
- Parameters
-
sup The supeltypemodule::supeltype object to update state for
This subroutine is invoked once after convergence as been reached.
- Date
- 28 Oct 2008
◆ updatesupelcorot()
| subroutine supeltypemodule::updatesupelcorot | ( | type(supeltype), intent(inout) | sup, |
| integer, intent(in) | dbgUnit, | ||
| integer, intent(inout) | stat | ||
| ) |
Updates the co-rotated system for a superelement.
- Parameters
-
sup The supeltypemodule::supeltype object to update for dbgUnit File unit number for debug print out stat Status flag, negative value on output indicates an error
If stat equals 1 on input, the relative position matrix for the triangle is initiated (used only for shadowPosAlg == 1).
- Date
- Sep 1999
- Date
- Nov 2003
◆ writesupeltype()
|
private |
Standard routine for writing an object to file.
- Parameters
-
[in] sup The supeltypemodule::supeltype object to write [in] io File unit number to write to [in] complexity If present, the value indicates the amount of print
- Date
- 27 Sep 1998