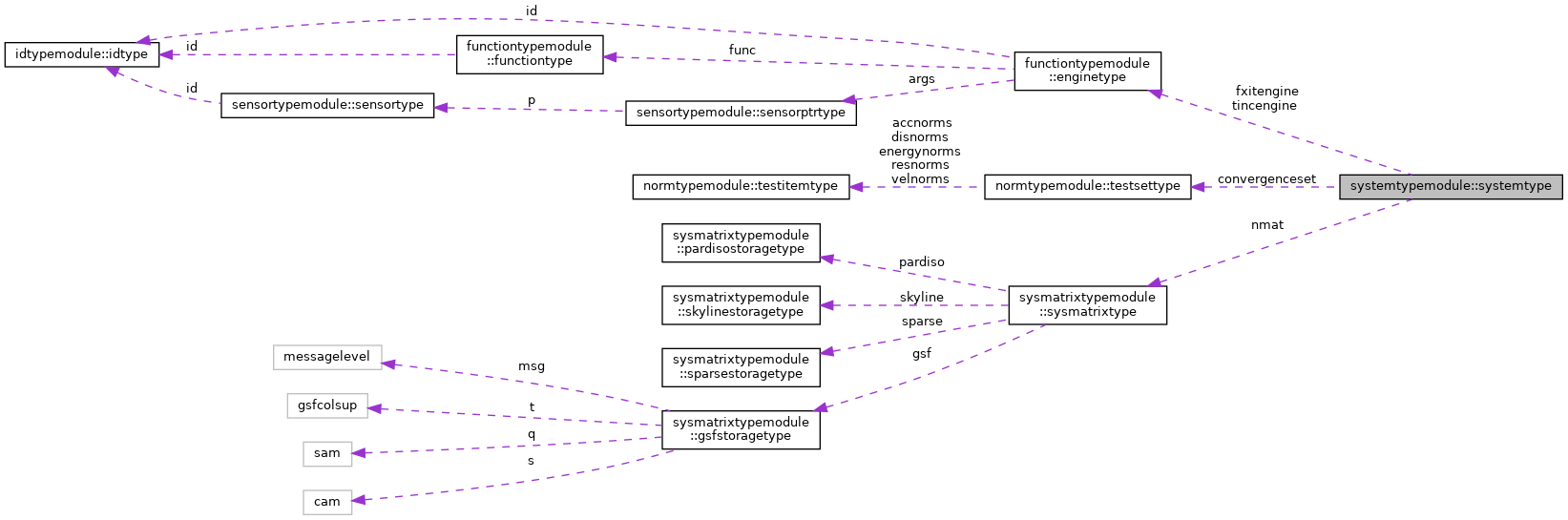
Data type containing parameters and system matrices of the model. More...
Public Attributes | |
| real(dp) | time |
| Current physical time. More... | |
| real(dp) | timestep |
| Current time step size. More... | |
| real(dp) | timeprev |
| Previous time step size. More... | |
| real(dp) | tstart |
| Start time of simulation. More... | |
| real(dp) | tend |
| Stop time of simulation. More... | |
| real(dp) | tqstatic |
| Stop time of quasi-static simulation. More... | |
| real(dp) | tinc |
| Initial time increment size. More... | |
| real(dp) | maxinc |
| Maximum time increment size. More... | |
| real(dp) | mininc |
| Minimum time increment size. More... | |
| integer | varinc |
| Indicator for automatic time increments. More... | |
| integer | ncutstp |
| Number of steps to perform after each cut-back before increasing the time increment size again. More... | |
| real(dp), dimension(2) | cutbck |
| Iteration cut-back ratios. More... | |
| type(enginetype), pointer | tincengine |
| Time step size function. More... | |
| type(enginetype), pointer | fxitengine |
| Number of iterations function. More... | |
| real(dp) | alpha_m |
| Generalized alpha parameter for inertia terms. More... | |
| real(dp) | alpha_f |
| Generalized alpha parameters for stiffness terms. More... | |
| real(dp) | alpha |
| The HHT alpha-parameter for numeric damping. More... | |
| real(dp) | beta |
| Newmark time integration parameter. More... | |
| real(dp) | gamma |
| Newmark time integration parameter. More... | |
| real(dp) | svel |
| Scaling factor for velocity update. More... | |
| real(dp) | sacc |
| Scaling factor for acceleration update. More... | |
| integer | maxit |
| Maximum number of iterations per time step. More... | |
| integer | minit |
| Minimum number of iterations per time step. More... | |
| integer | fixedit |
| Prescribed number of iterations per time step. More... | |
| integer | nupdat |
| Number of iterations with tangent matrix update. More... | |
| integer | maxsequentialnoupdate |
| Maximum number of sequental iterations without tangent matrix updates. More... | |
| real(dp) | tolupdatefactor |
| Relative tolerance to determine if tangent matrix update is necessary. More... | |
| integer(i8) | nstep |
| Total number of time steps. More... | |
| integer(i8) | niter |
| Total number of iterations updates. More... | |
| integer(i8) | nupdates |
| Total number of matrix updates. More... | |
| integer | nupdathisstep |
| Number of matrix updates for this step. More... | |
| integer | niterthisstep |
| Number of iterations for this step. More... | |
| real(dp) | niterprevstep |
| Number of iterations for previous step. More... | |
| real(dp) | equtol |
| Initial static equilibrium convergence tolerance. More... | |
| real(dp) | equlim |
| Initial static equilibrium step size limit. More... | |
| logical, dimension(2) | stressstiffison |
| Geometric stiffness toggles. More... | |
| real(dp), dimension(3) | wdisp |
| Norm scaling factors for Displacements. More... | |
| real(dp), dimension(3) | wforce |
| Norm scaling factors for Residual forces. More... | |
| type(testsettype) | convergenceset |
| Iteration convergence data. More... | |
| real(dp), dimension(:), pointer | urd |
| Velocity in global direction. More... | |
| real(dp), dimension(:), pointer | urdd |
| Acceleration in global direction. More... | |
| real(dp), dimension(:), pointer | urdp |
| Global velocity in previous step. More... | |
| real(dp), dimension(:), pointer | urddp |
| Global acceleration in previous step. More... | |
| real(dp), dimension(:), pointer | dk |
| Estimated velocity for predictor step. More... | |
| real(dp), dimension(:), pointer | ak |
| Estimated acceleration for predictor step. More... | |
| real(dp), dimension(:), pointer | del |
| RHS/Solution vector of the linear system. More... | |
| real(dp), dimension(:,:), pointer | sinc |
| Iterative solution increment. More... | |
| real(dp), dimension(:), pointer | rinc |
| Total increment for current time step. More... | |
| real(dp), dimension(:), pointer | rfk |
| Reaction force vector. More... | |
| real(dp), dimension(:), pointer | qk |
| External force vector in system direction. More... | |
| real(dp), dimension(:), pointer | qprev |
| External force vector of previous step. More... | |
| real(dp), dimension(:), pointer | fsk |
| Internal stiffness force vector. More... | |
| real(dp), dimension(:), pointer | fdk |
| Internal damping force vector. More... | |
| real(dp), dimension(:), pointer | fik |
| Internal inertia force vector. More... | |
| real(dp), dimension(:), pointer | fiprev |
| Inertia forces of previous step. More... | |
| real(dp), dimension(:), pointer | fiactual |
| Inertia forces including the residual. More... | |
| real(dp), dimension(:), pointer | residual |
| Current residual force vector. More... | |
| type(sysmatrixtype) | nmat |
| The system Newton matrix. More... | |
Detailed Description
Data type containing parameters and system matrices of the model.
Member Data Documentation
◆ ak
| real(dp), dimension(:), pointer systemtypemodule::systemtype::ak |
Estimated acceleration for predictor step.
◆ alpha
| real(dp) systemtypemodule::systemtype::alpha |
The HHT alpha-parameter for numeric damping.
◆ alpha_f
| real(dp) systemtypemodule::systemtype::alpha_f |
Generalized alpha parameters for stiffness terms.
◆ alpha_m
| real(dp) systemtypemodule::systemtype::alpha_m |
Generalized alpha parameter for inertia terms.
◆ beta
| real(dp) systemtypemodule::systemtype::beta |
Newmark time integration parameter.
◆ convergenceset
| type(testsettype) systemtypemodule::systemtype::convergenceset |
Iteration convergence data.
◆ cutbck
| real(dp), dimension(2) systemtypemodule::systemtype::cutbck |
Iteration cut-back ratios.
◆ del
| real(dp), dimension(:), pointer systemtypemodule::systemtype::del |
RHS/Solution vector of the linear system.
◆ dk
| real(dp), dimension(:), pointer systemtypemodule::systemtype::dk |
Estimated velocity for predictor step.
◆ equlim
| real(dp) systemtypemodule::systemtype::equlim |
Initial static equilibrium step size limit.
◆ equtol
| real(dp) systemtypemodule::systemtype::equtol |
Initial static equilibrium convergence tolerance.
◆ fdk
| real(dp), dimension(:), pointer systemtypemodule::systemtype::fdk |
Internal damping force vector.
◆ fiactual
| real(dp), dimension(:), pointer systemtypemodule::systemtype::fiactual |
Inertia forces including the residual.
◆ fik
| real(dp), dimension(:), pointer systemtypemodule::systemtype::fik |
Internal inertia force vector.
◆ fiprev
| real(dp), dimension(:), pointer systemtypemodule::systemtype::fiprev |
Inertia forces of previous step.
◆ fixedit
| integer systemtypemodule::systemtype::fixedit |
Prescribed number of iterations per time step.
◆ fsk
| real(dp), dimension(:), pointer systemtypemodule::systemtype::fsk |
Internal stiffness force vector.
◆ fxitengine
| type(enginetype), pointer systemtypemodule::systemtype::fxitengine |
Number of iterations function.
◆ gamma
| real(dp) systemtypemodule::systemtype::gamma |
Newmark time integration parameter.
◆ maxinc
| real(dp) systemtypemodule::systemtype::maxinc |
Maximum time increment size.
◆ maxit
| integer systemtypemodule::systemtype::maxit |
Maximum number of iterations per time step.
◆ maxsequentialnoupdate
| integer systemtypemodule::systemtype::maxsequentialnoupdate |
Maximum number of sequental iterations without tangent matrix updates.
◆ mininc
| real(dp) systemtypemodule::systemtype::mininc |
Minimum time increment size.
◆ minit
| integer systemtypemodule::systemtype::minit |
Minimum number of iterations per time step.
◆ ncutstp
| integer systemtypemodule::systemtype::ncutstp |
Number of steps to perform after each cut-back before increasing the time increment size again.
◆ niter
| integer(i8) systemtypemodule::systemtype::niter |
Total number of iterations updates.
◆ niterprevstep
| real(dp) systemtypemodule::systemtype::niterprevstep |
Number of iterations for previous step.
◆ niterthisstep
| integer systemtypemodule::systemtype::niterthisstep |
Number of iterations for this step.
◆ nmat
| type(sysmatrixtype) systemtypemodule::systemtype::nmat |
The system Newton matrix.
◆ nstep
| integer(i8) systemtypemodule::systemtype::nstep |
Total number of time steps.
◆ nupdat
| integer systemtypemodule::systemtype::nupdat |
Number of iterations with tangent matrix update.
◆ nupdates
| integer(i8) systemtypemodule::systemtype::nupdates |
Total number of matrix updates.
◆ nupdathisstep
| integer systemtypemodule::systemtype::nupdathisstep |
Number of matrix updates for this step.
◆ qk
| real(dp), dimension(:), pointer systemtypemodule::systemtype::qk |
External force vector in system direction.
◆ qprev
| real(dp), dimension(:), pointer systemtypemodule::systemtype::qprev |
External force vector of previous step.
◆ residual
| real(dp), dimension(:), pointer systemtypemodule::systemtype::residual |
Current residual force vector.
◆ rfk
| real(dp), dimension(:), pointer systemtypemodule::systemtype::rfk |
Reaction force vector.
◆ rinc
| real(dp), dimension(:), pointer systemtypemodule::systemtype::rinc |
Total increment for current time step.
◆ sacc
| real(dp) systemtypemodule::systemtype::sacc |
Scaling factor for acceleration update.
◆ sinc
| real(dp), dimension(:,:), pointer systemtypemodule::systemtype::sinc |
Iterative solution increment.
◆ stressstiffison
| logical, dimension(2) systemtypemodule::systemtype::stressstiffison |
Geometric stiffness toggles.
◆ svel
| real(dp) systemtypemodule::systemtype::svel |
Scaling factor for velocity update.
◆ tend
| real(dp) systemtypemodule::systemtype::tend |
Stop time of simulation.
◆ time
| real(dp) systemtypemodule::systemtype::time |
Current physical time.
◆ timeprev
| real(dp) systemtypemodule::systemtype::timeprev |
Previous time step size.
◆ timestep
| real(dp) systemtypemodule::systemtype::timestep |
Current time step size.
◆ tinc
| real(dp) systemtypemodule::systemtype::tinc |
Initial time increment size.
◆ tincengine
| type(enginetype), pointer systemtypemodule::systemtype::tincengine |
Time step size function.
◆ tolupdatefactor
| real(dp) systemtypemodule::systemtype::tolupdatefactor |
Relative tolerance to determine if tangent matrix update is necessary.
◆ tqstatic
| real(dp) systemtypemodule::systemtype::tqstatic |
Stop time of quasi-static simulation.
◆ tstart
| real(dp) systemtypemodule::systemtype::tstart |
Start time of simulation.
◆ urd
| real(dp), dimension(:), pointer systemtypemodule::systemtype::urd |
Velocity in global direction.
◆ urdd
| real(dp), dimension(:), pointer systemtypemodule::systemtype::urdd |
Acceleration in global direction.
◆ urddp
| real(dp), dimension(:), pointer systemtypemodule::systemtype::urddp |
Global acceleration in previous step.
◆ urdp
| real(dp), dimension(:), pointer systemtypemodule::systemtype::urdp |
Global velocity in previous step.
◆ varinc
| integer systemtypemodule::systemtype::varinc |
Indicator for automatic time increments.
- = 0 No, use constant or prescribed time increment sizes
- = 1 Yes, based on local truncation error
◆ wdisp
| real(dp), dimension(3) systemtypemodule::systemtype::wdisp |
Norm scaling factors for Displacements.
◆ wforce
| real(dp), dimension(3) systemtypemodule::systemtype::wforce |
Norm scaling factors for Residual forces.
The documentation for this type was generated from the following file:
- src/vpmSolver/systemTypeModule.f90