Module with subroutines/functions for evaluation of general functions. More...
Functions/Subroutines | |
| subroutine | setpointersforsensors (eArr, tArr, sArr, dArr) |
| Initialization of private pointers. More... | |
| subroutine | preevaluate (engines, ierr) |
| Pre-evaluation of general functions. More... | |
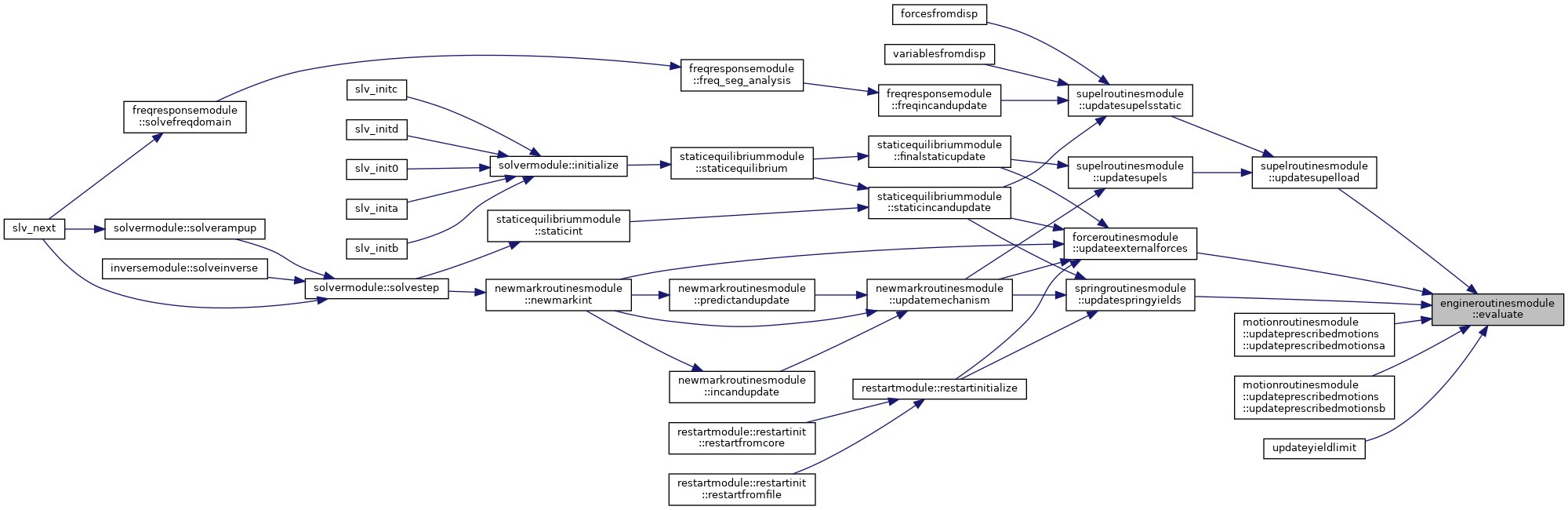
| real(dp) function | evaluate (engine, E1, E0, ierr, xArg) |
| Evaluates a general function with optional scaling and offset. More... | |
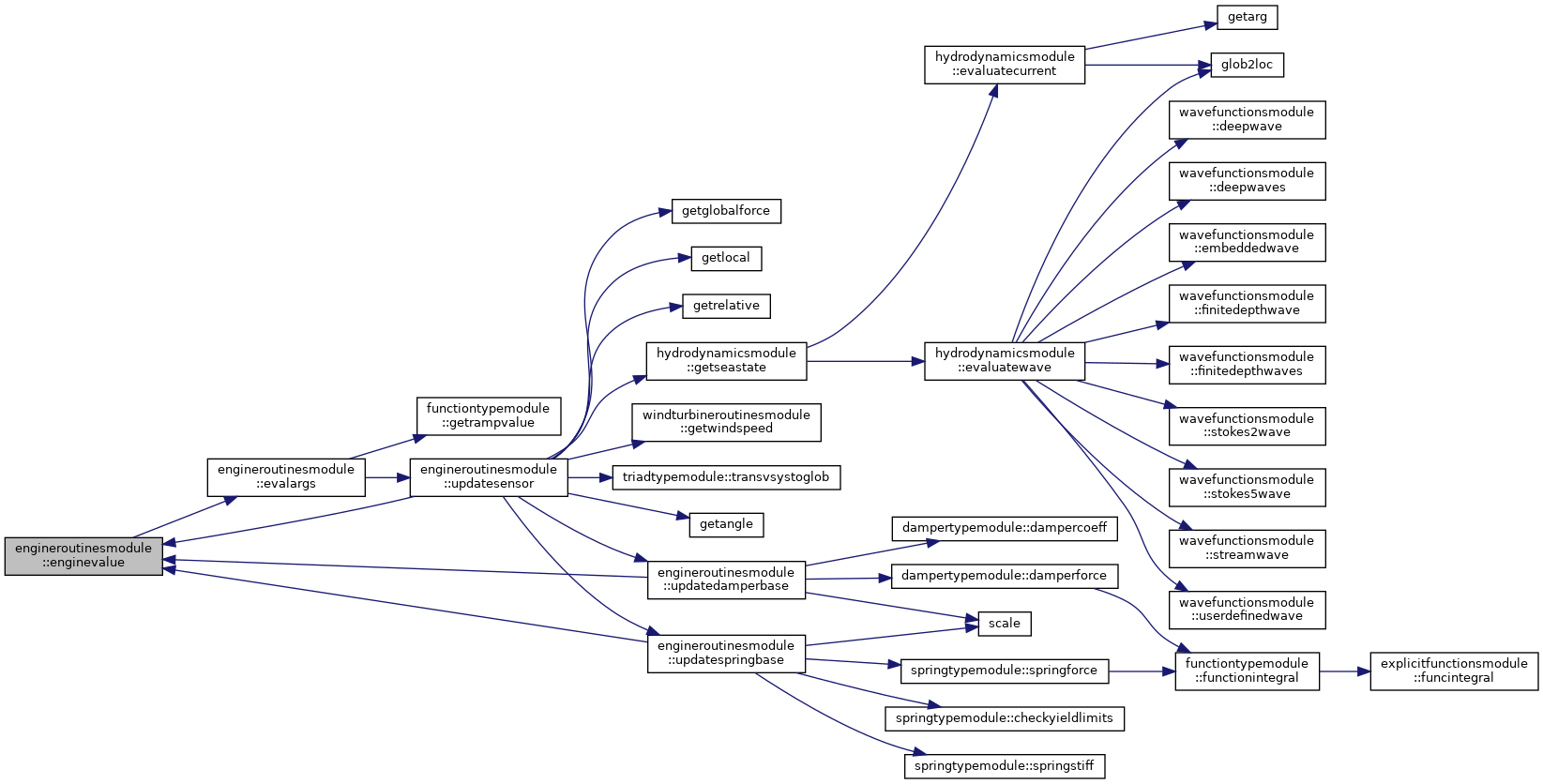
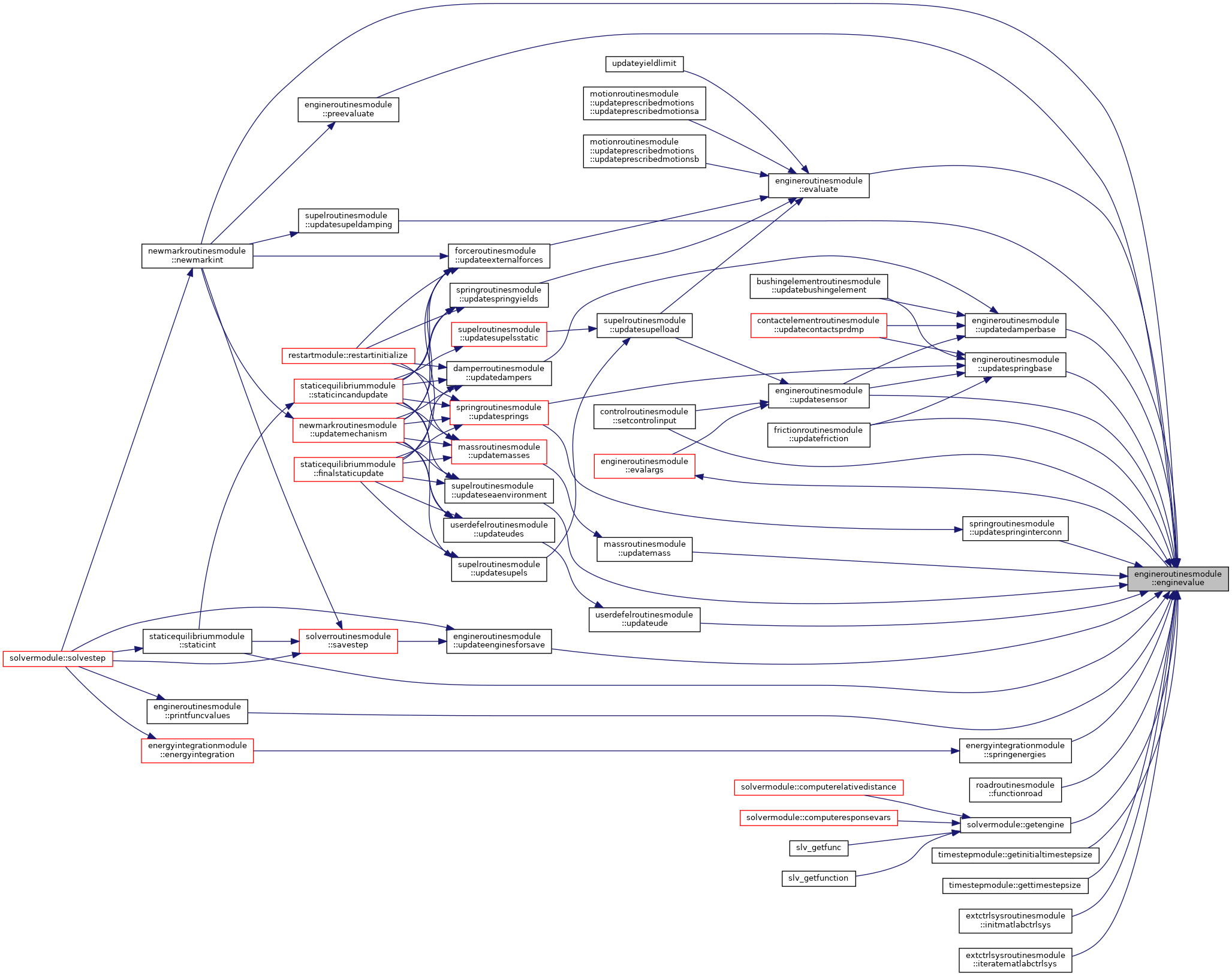
| recursive real(dp) function | enginevalue (engine, ierr, xArg) |
| Evaluates a general function. More... | |
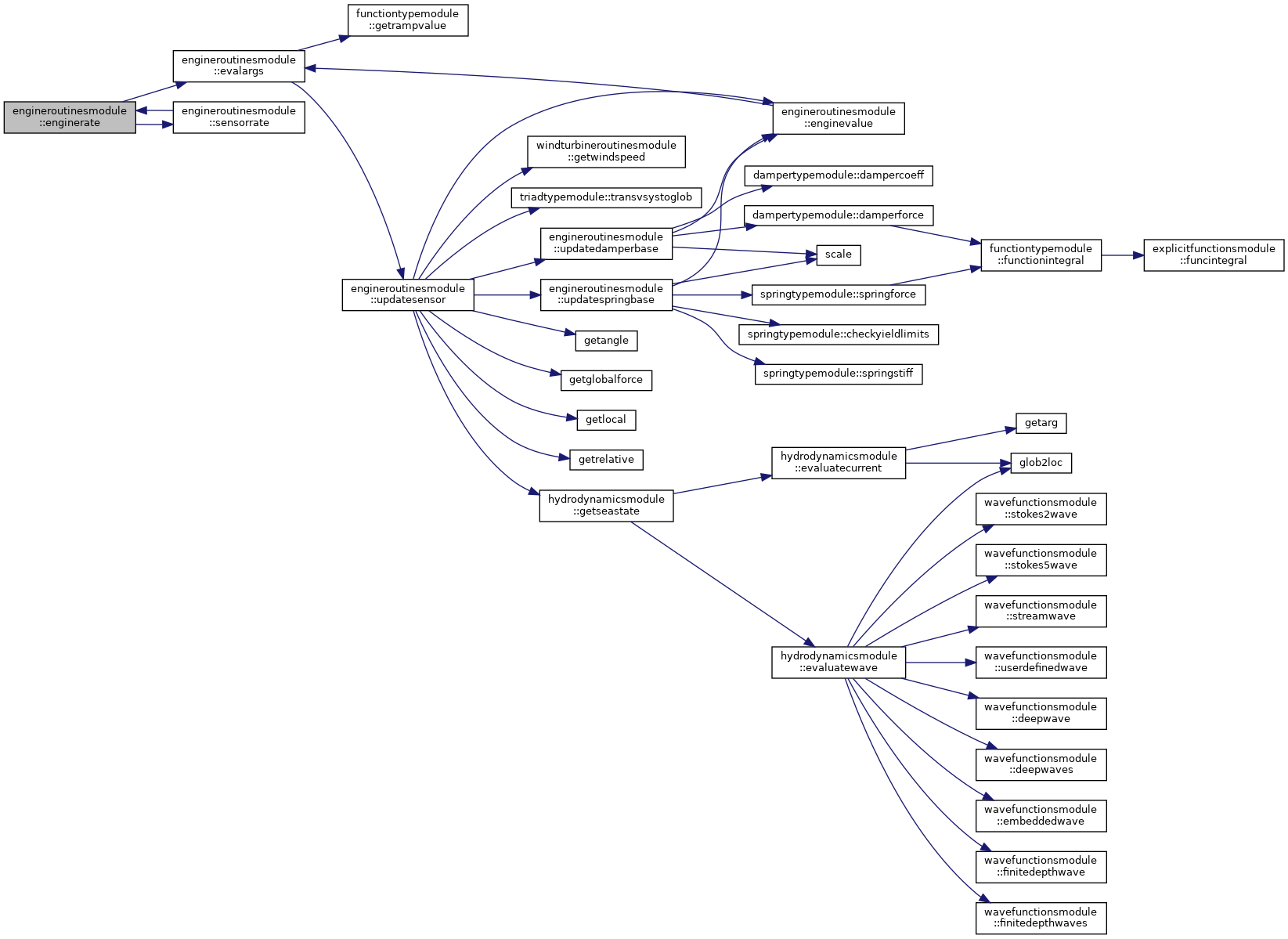
| recursive real(dp) function | enginerate (engine, ierr, tArg) |
| Evaluates the time-derivative of a general function. More... | |
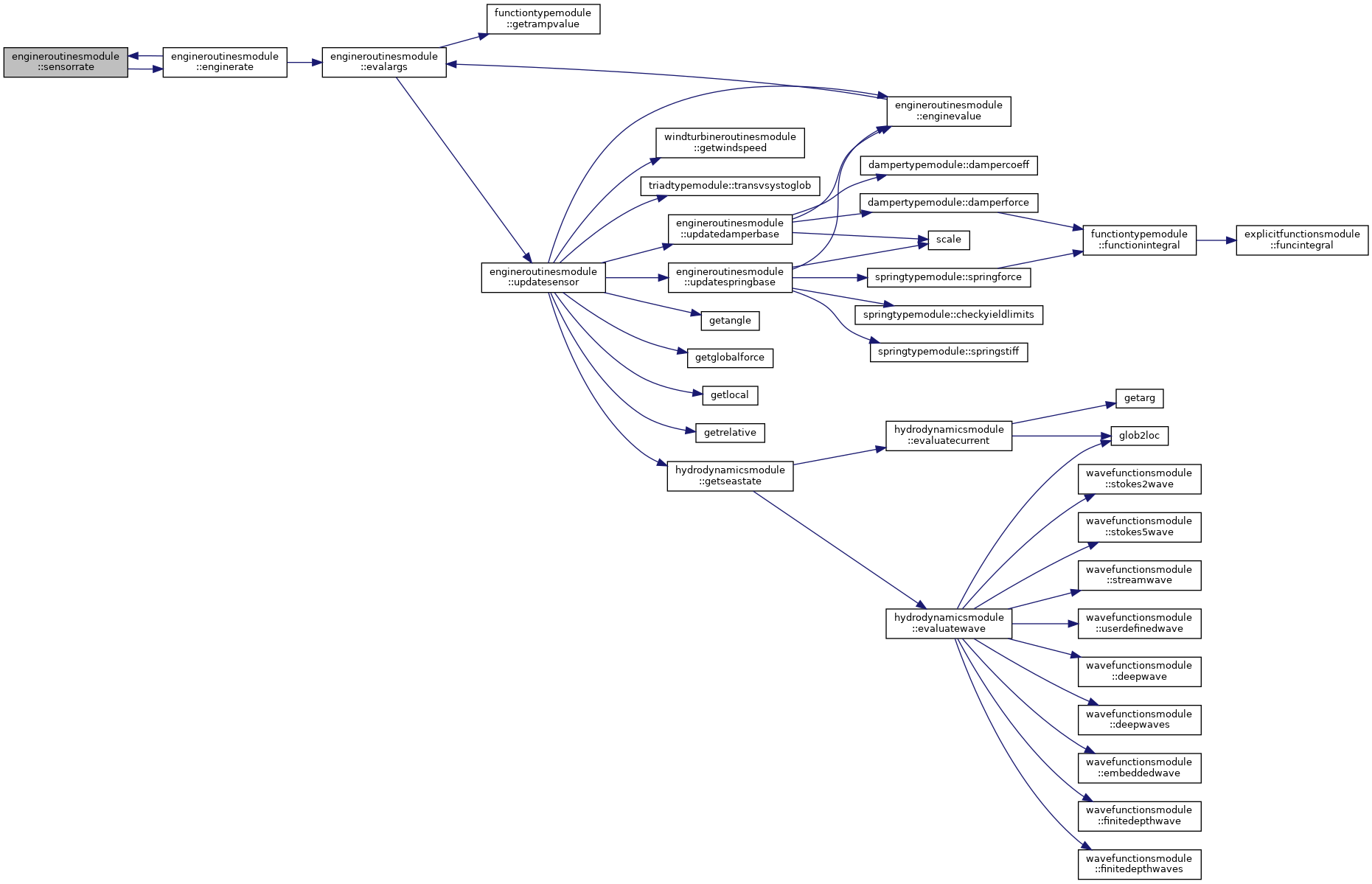
| recursive real(dp) function, private | sensorrate (sensor, ierr) |
| Evaluates the time-derivative of a sensor value. More... | |
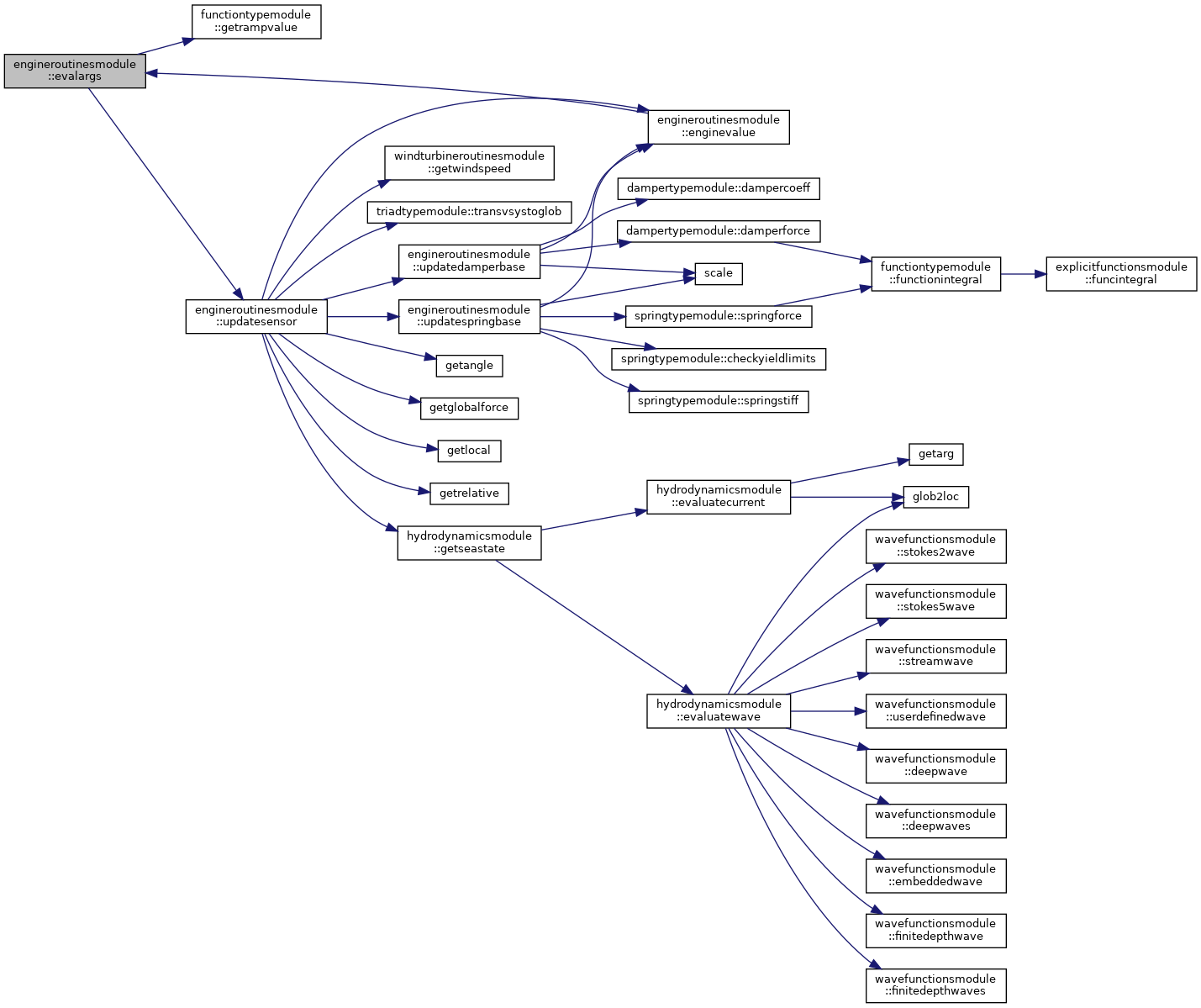
| recursive subroutine, private | evalargs (args, nArg, iDer, xArg, x, rVal, ierr) |
| Evaluates the argument(s) of a general function. More... | |
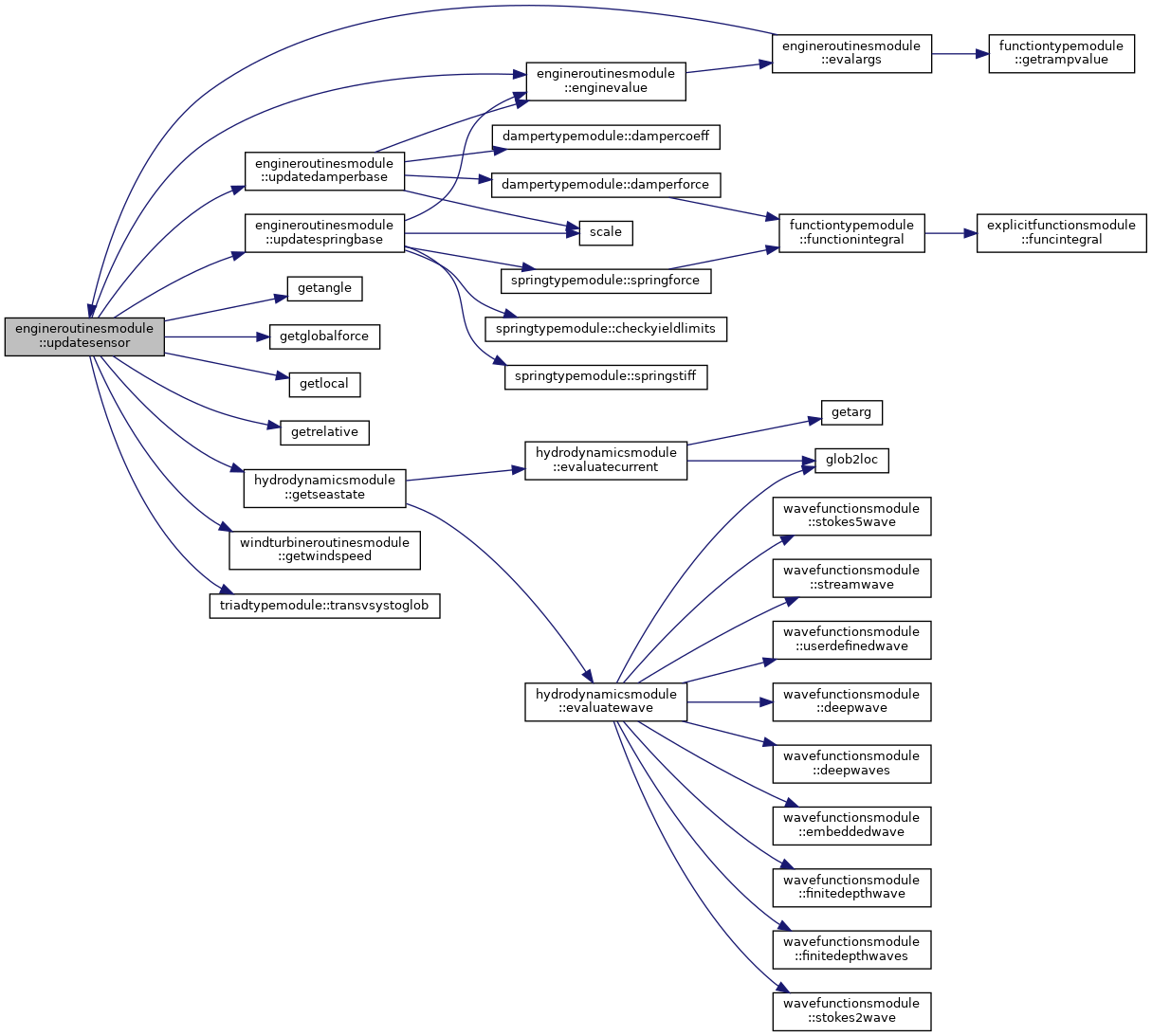
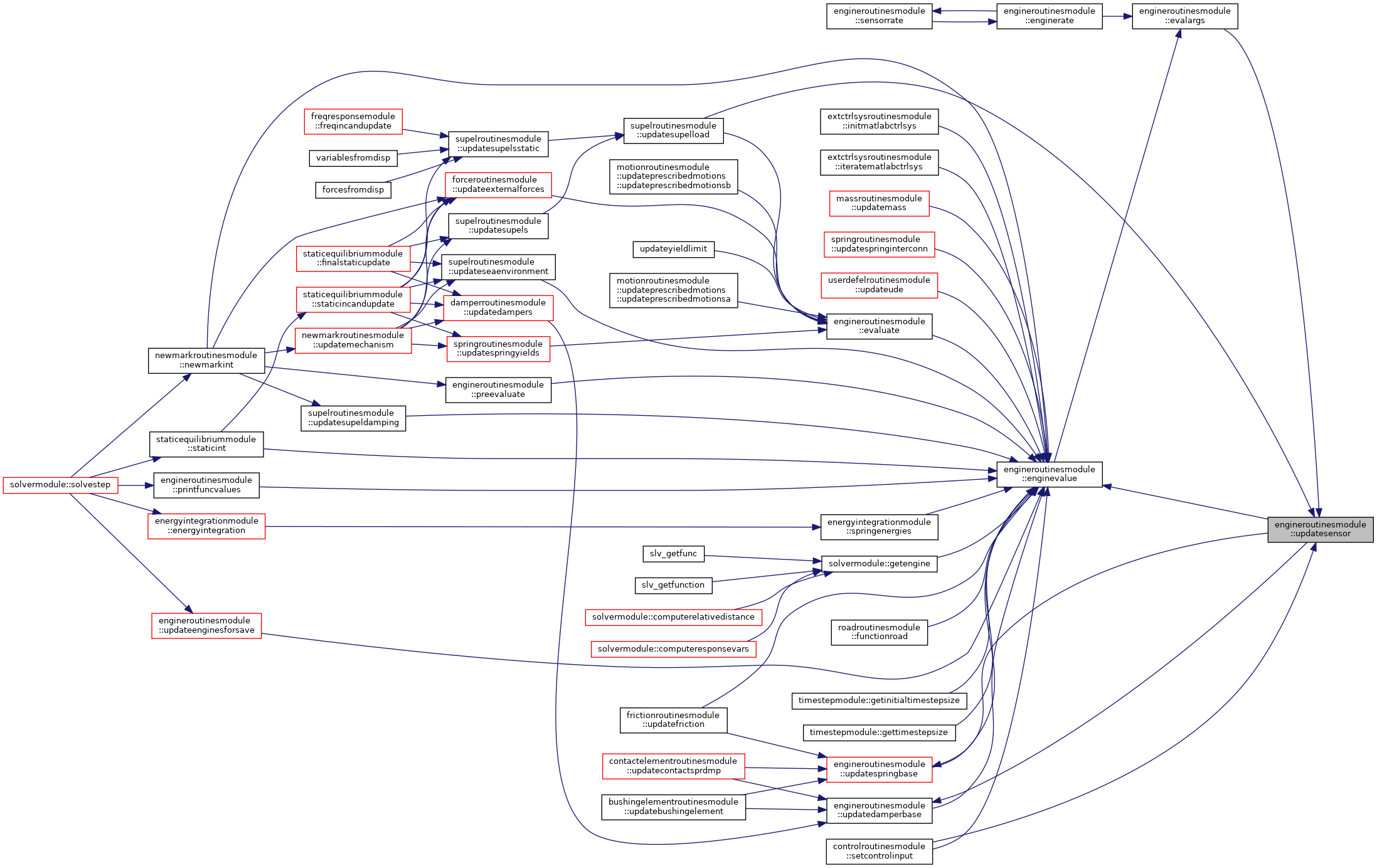
| recursive subroutine | updatesensor (sensor, ierr) |
| Updates a sensor value depending on the sensor type. More... | |
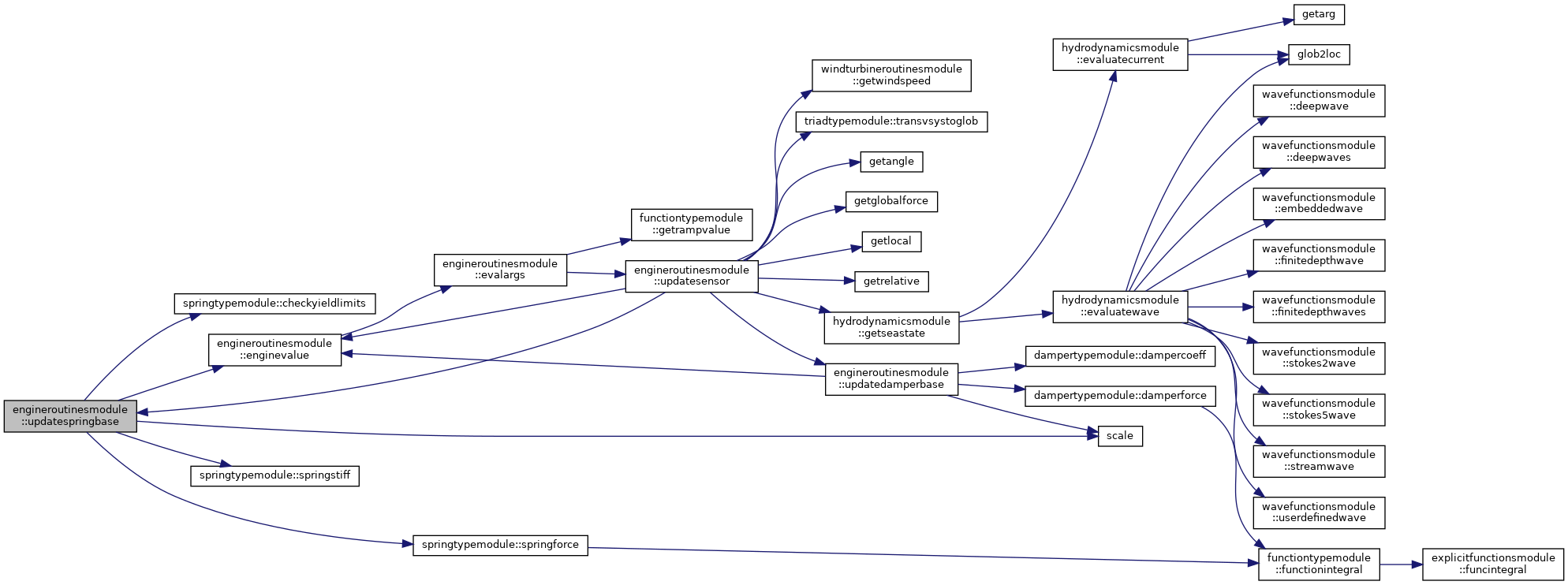
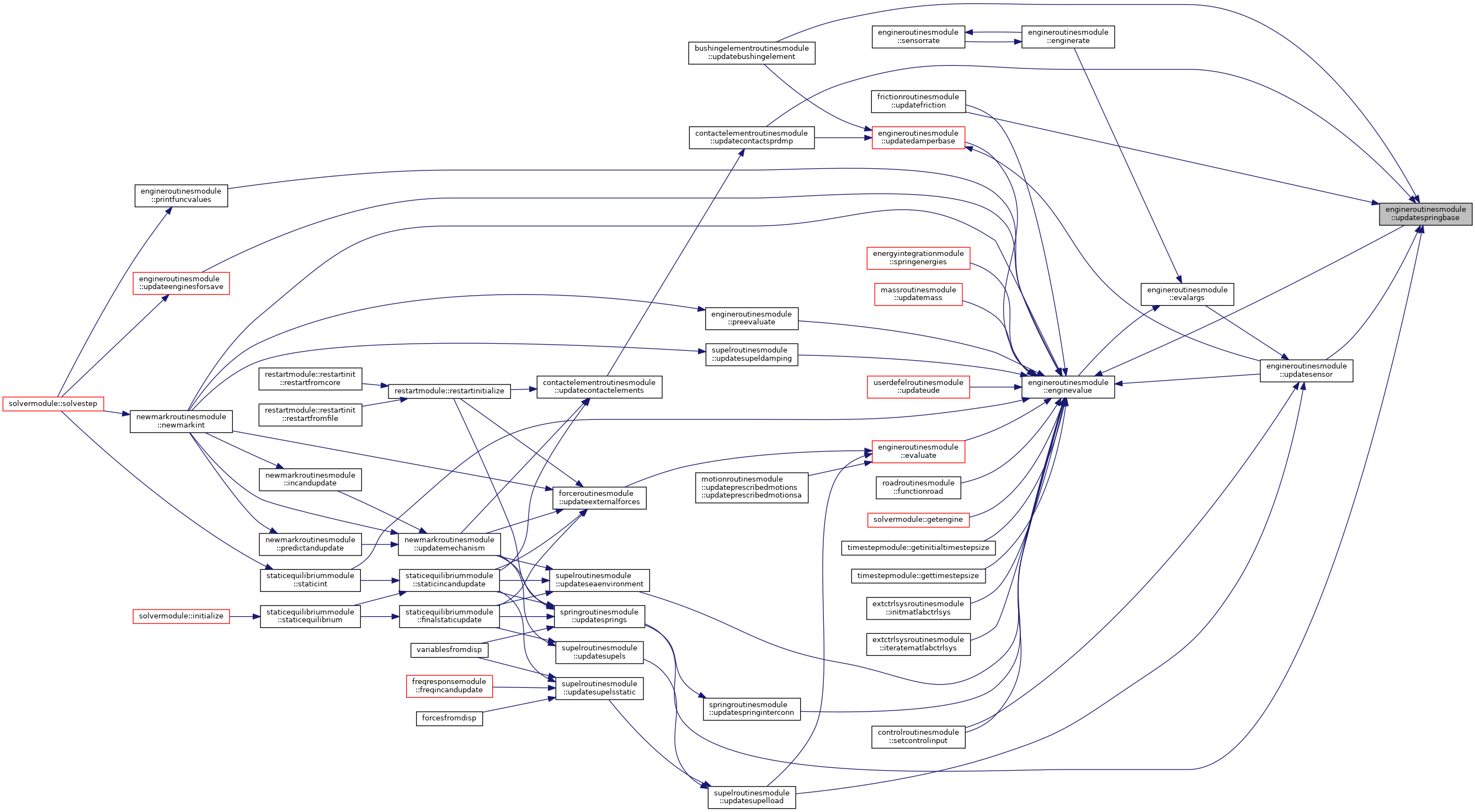
| recursive subroutine | updatespringbase (spr, ierr) |
| Updates the spring variables. More... | |
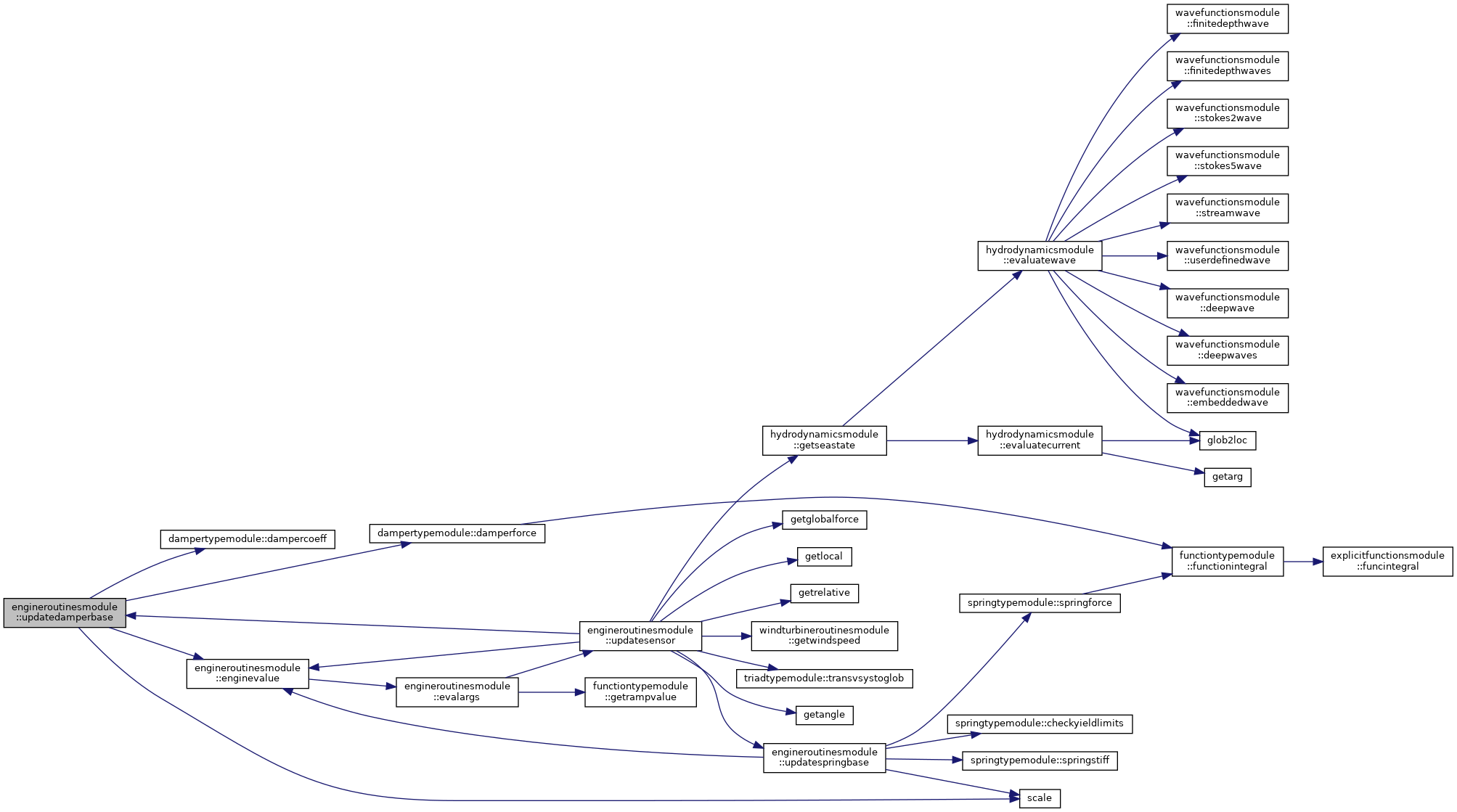
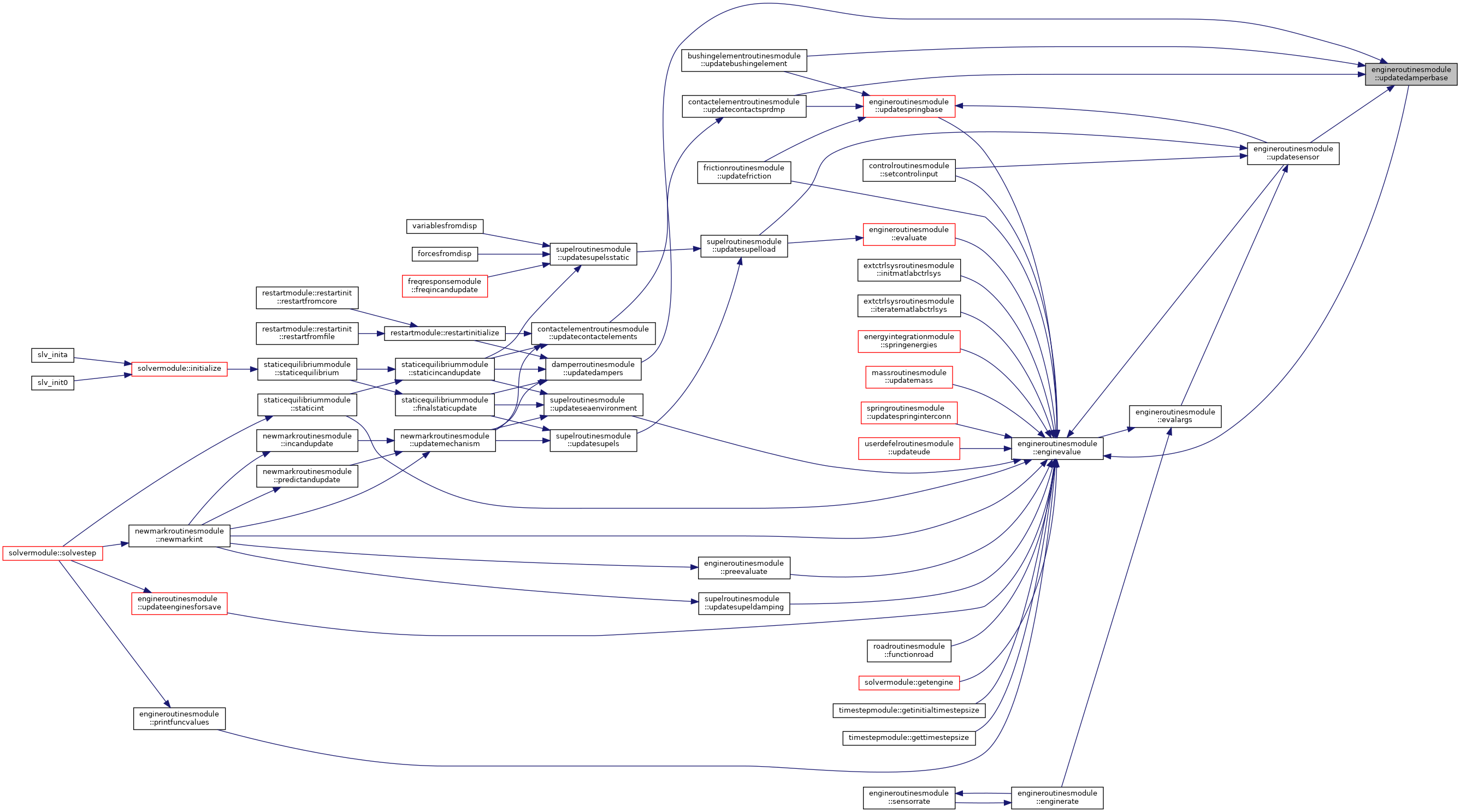
| recursive subroutine | updatedamperbase (dmp, ierr) |
| Updates the damper variables. More... | |
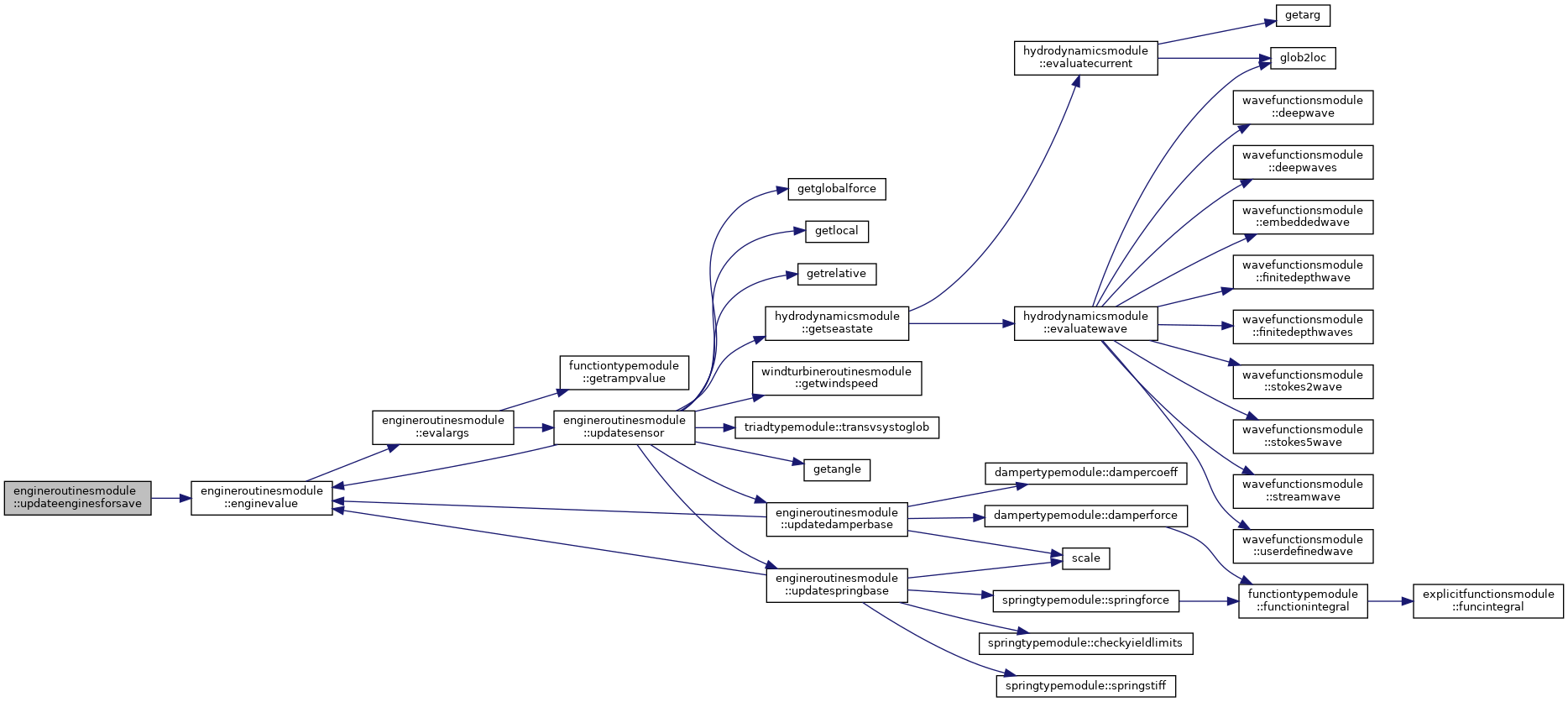
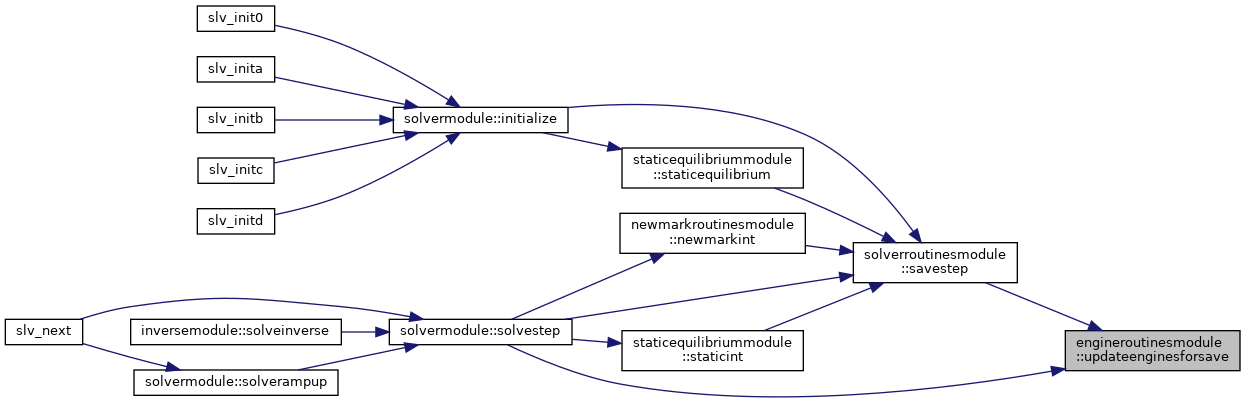
| subroutine | updateenginesforsave (engines, eFlag, ierr) |
| Update all engines and store the values for saving. More... | |
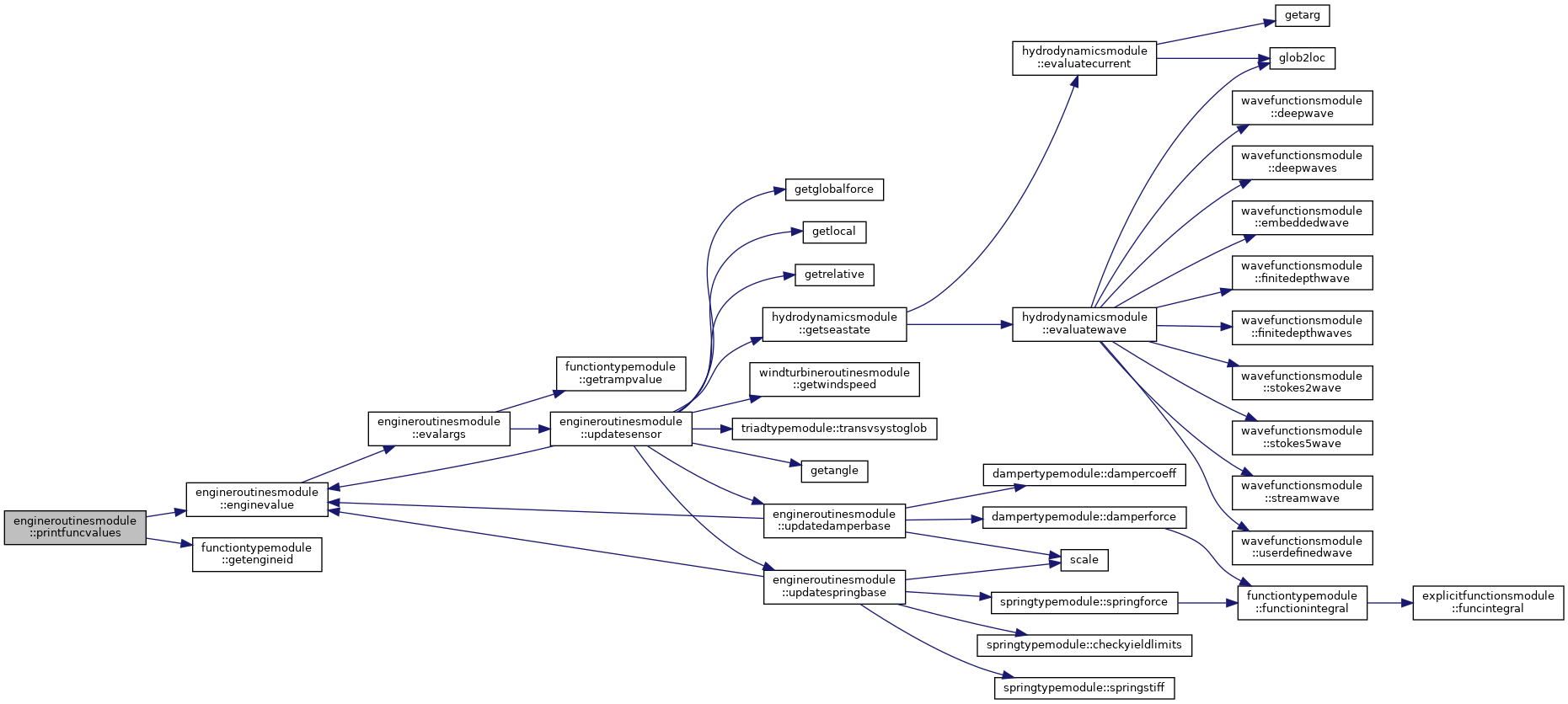
| subroutine | printfuncvalues (istep, time, engines, lpu) |
| Updates and prints out the current value of all general functions. More... | |
Variables | |
| type(environmenttype), pointer, save, public | ourenvir => null() |
| Public pointer to the environmental data member in the mechanismtypemodule::mechanismtype object. More... | |
| type(enginetype), dimension(:), pointer, save, private | engines => null() |
| Private pointer to the corresponding member array in the mechanismtypemodule::mechanismtype object. More... | |
| type(triadtype), dimension(:), pointer, save, private | triads => null() |
| Private pointer to the corresponding member array in the mechanismtypemodule::mechanismtype object. More... | |
| type(springbasetype), dimension(:), pointer, save, private | springs => null() |
| Private pointer to the corresponding member array in the mechanismtypemodule::mechanismtype object. More... | |
| type(damperbasetype), dimension(:), pointer, save, private | dampers => null() |
| Private pointer to the corresponding member array in the mechanismtypemodule::mechanismtype object. More... | |
| logical, save | ispredictorstep = .false. |
| Flag used for consistent right-hand-side calculation in the predictor step. More... | |
Detailed Description
Module with subroutines/functions for evaluation of general functions.
This module contains functions and subroutines for evaluating general functions, which are represented by functiontypemodule::enginetype objects in the model.
- Note
- The enginevalue() function may be implicitly recursive if a sensortypemodule::sensortype object defining an argument of the general function is defined on a quantity which again may be controlled by (another) general function. Currently, this applies to sensors on spring- and damper quantities. Due to this, the update subroutines for springs and dampers as well as sensors have all to be within this module, in order to avoid circular use inclusions. No other (non-recursive) subroutines that work on functiontypemodule::enginetype objects should be placed in this module.
Function/Subroutine Documentation
◆ enginerate()
| recursive real(dp) function engineroutinesmodule::enginerate | ( | type(enginetype), intent(inout) | engine, |
| integer, intent(inout) | ierr, | ||
| real(dp), intent(in), optional | tArg | ||
| ) |
Evaluates the time-derivative of a general function.
- Parameters
-
engine The general function to evaluate ierr Error flag [in] tArg Optional function argument value
- Date
- 13 May 2002
- Date
- 17 Nov 2014

◆ enginevalue()
| recursive real(dp) function engineroutinesmodule::enginevalue | ( | type(enginetype), intent(inout) | engine, |
| integer, intent(inout) | ierr, | ||
| real(dp), intent(in), optional | xArg | ||
| ) |
Evaluates a general function.
- Parameters
-
engine The general function to evaluate ierr Error flag [in] xArg Optional function argument value
- EngineValue = func(x), if func is defined for engine
- EngineValue = x, if func is not defined for engine
x may either be the input xArg or sensor-defined.
- Note
- This may be an implicit recursive function through the call sequence: -> evalargs -> updatesensor -> updatespringbase -> enginevalueupdatedamperbase
- Date
- 6 Jun 2002
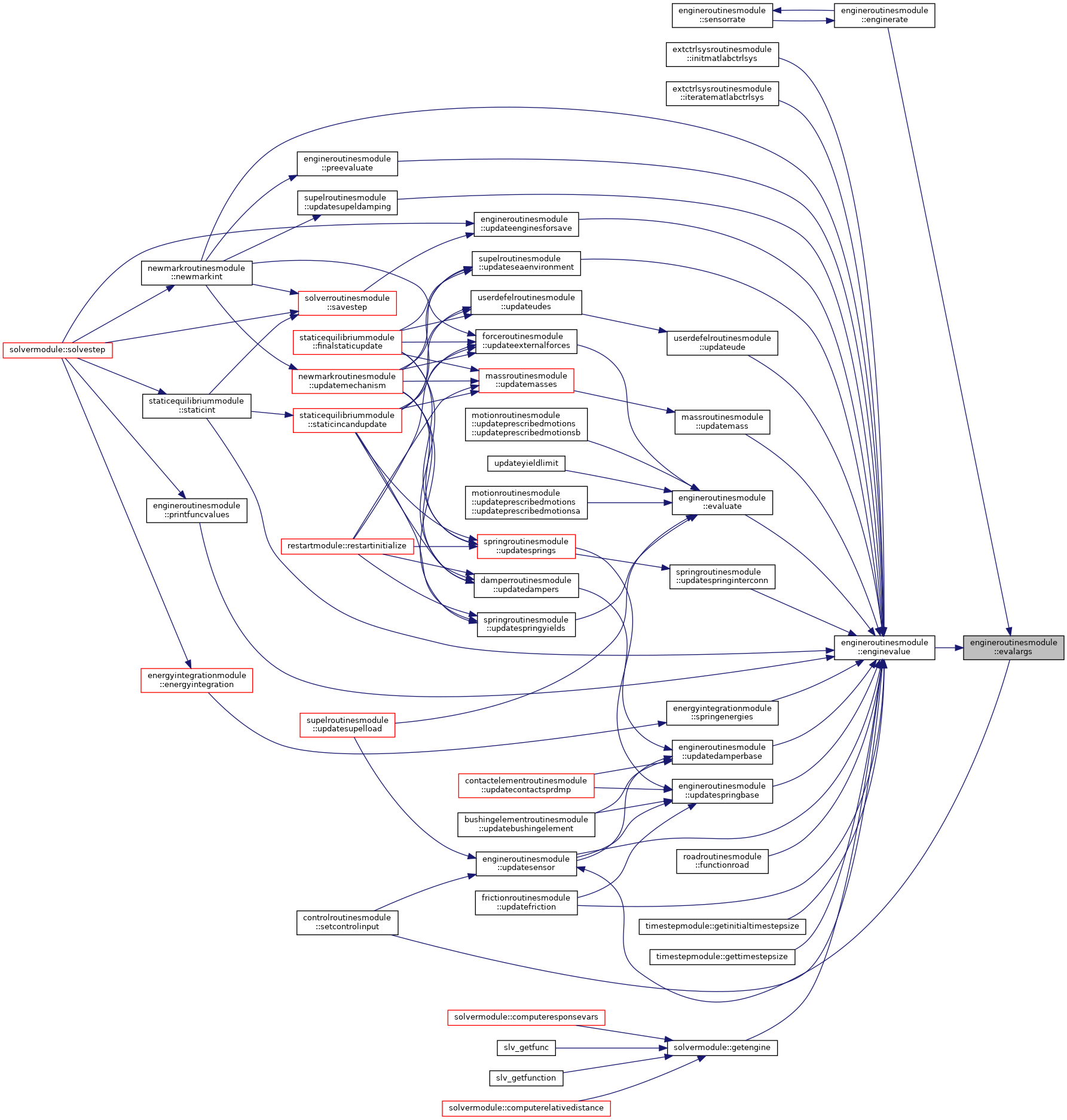
◆ evalargs()
|
private |
Evaluates the argument(s) of a general function.
- Parameters
-
args The function arguments to evaluate [in] nArg Length of array args [in] iDer Derivative order of ramp function (0, 1, or -1 for no ramp) [in] xArg Optional value of (first) function argument [out] x The evaluated argument value(s) [out] rVal Ramp function value or derivative (equals 1.0 if no ramp) ierr Error flag
The output value x may either be the input argument xArg or a sensor-defined value. If a ramp function is defined and the argument type is TIME, the argument value x is instead set to the end time of the ramp function, and the ramp function value is returned through rVal.
- Note
- This may be an implicit recursive subroutine through the call sequence: -> updatesensor -> updatespringbase -> enginevalue -> evalargs-> updatedamperbase enginerate /
- Date
- 22 Aug 2022
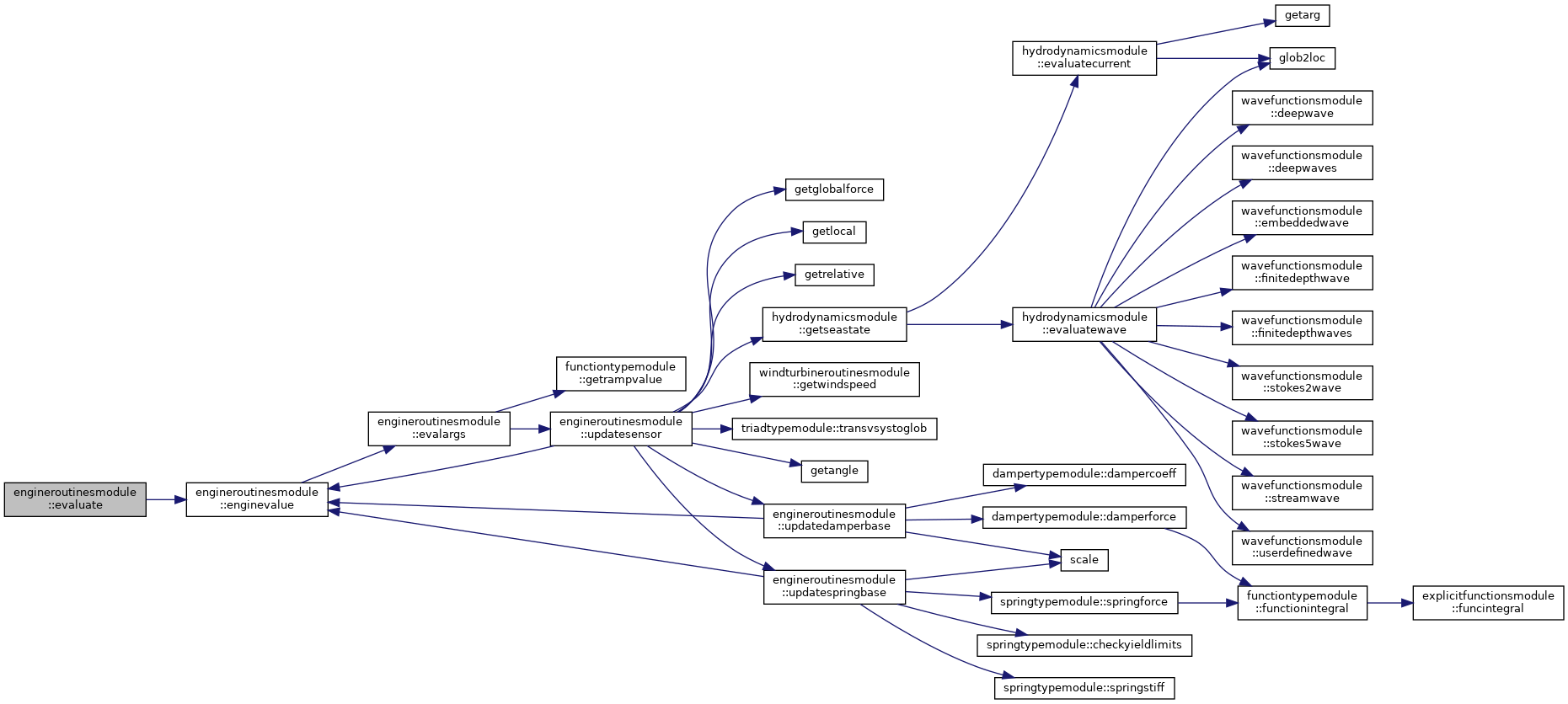
◆ evaluate()
| real(dp) function engineroutinesmodule::evaluate | ( | type(enginetype), pointer | engine, |
| real(dp), intent(in) | E1, | ||
| real(dp), intent(in) | E0, | ||
| integer, intent(inout) | ierr, | ||
| real(dp), intent(in), optional | xArg | ||
| ) |
Evaluates a general function with optional scaling and offset.
- Parameters
-
engine Points to the general function to evaluate [in] E1 Scaling factor [in] E0 Offset value ierr Error flag [in] xArg Optional function argument value
- eVal = E0 + E1*func(x), if func is defined for engine
- eVal = E0 + E1*x, if func is not defined for engine
x may either be the input xArg or sensor-defined.
- Date
- 6 Jun 2002
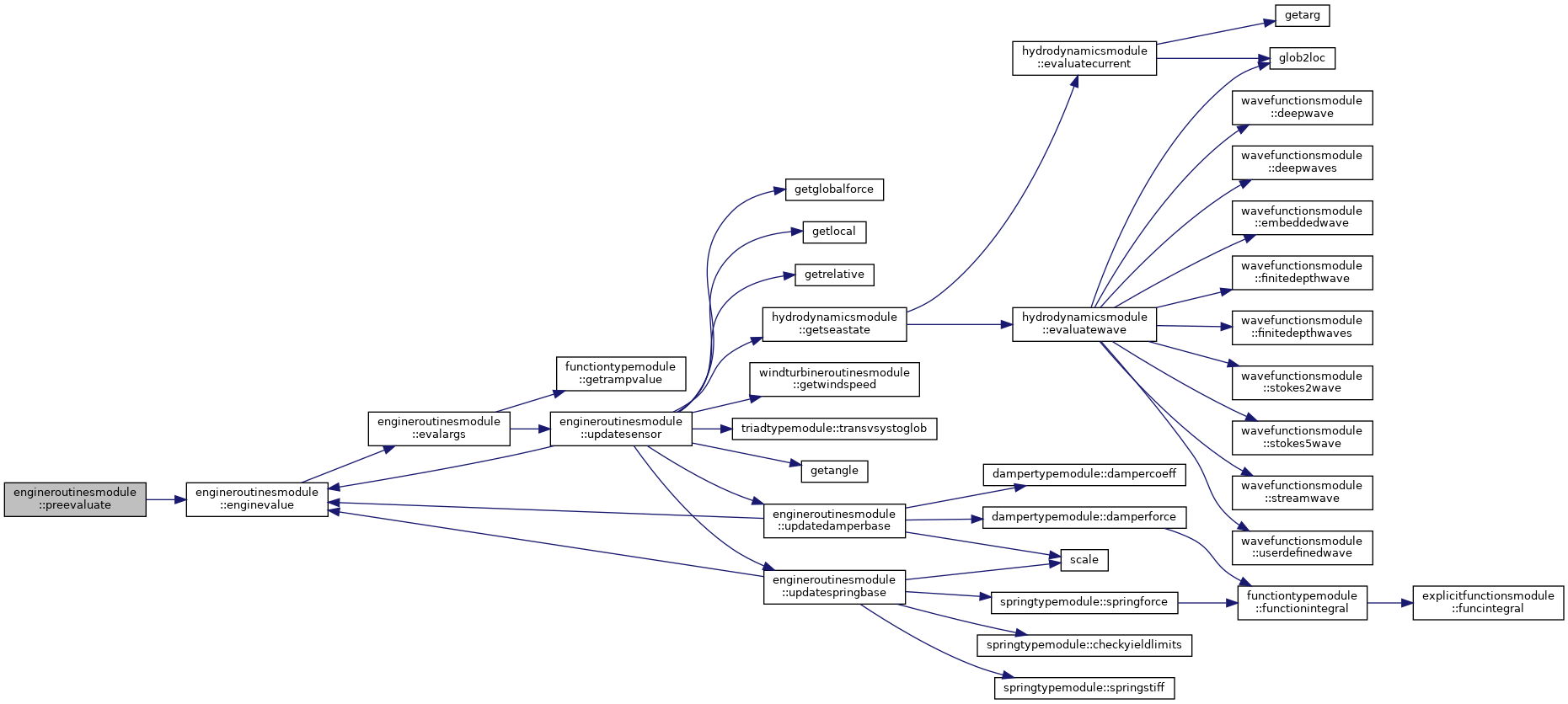
◆ preevaluate()
| subroutine engineroutinesmodule::preevaluate | ( | type(enginetype), dimension(:), intent(inout) | engines, |
| integer, intent(inout) | ierr | ||
| ) |
Pre-evaluation of general functions.
- Parameters
-
engines All general functions in the model ierr Error flag
This subroutine pre-evaluates all functiontypemodule::enginetype objects that have been flagged for it. It is used in the case that the order of evaluation matters, in particular for user-defined functions.
- Date
- 6 Feb 2015

◆ printfuncvalues()
| subroutine engineroutinesmodule::printfuncvalues | ( | integer, intent(in) | istep, |
| real(dp), intent(in) | time, | ||
| type(enginetype), dimension(:), intent(inout) | engines, | ||
| integer, intent(in) | lpu | ||
| ) |
Updates and prints out the current value of all general functions.
- Parameters
-
[in] istep Time increment counter [in] time Current time engines All general functions in the model [in] lpu File unit number for res-file output
- Date
- 12 Jun 2023

◆ sensorrate()
|
private |
Evaluates the time-derivative of a sensor value.
- Parameters
-
sensor The sensor object to evaluate the derivative for ierr Error flag
- Date
- 17 Nov 2014

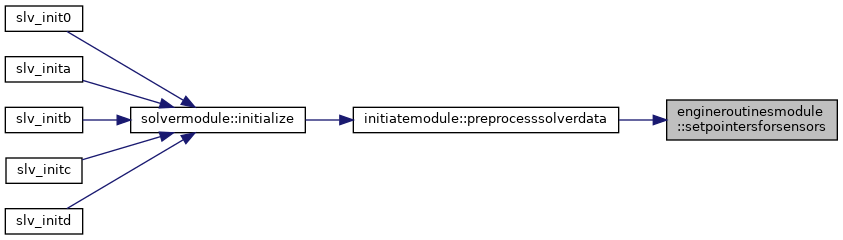
◆ setpointersforsensors()
| subroutine engineroutinesmodule::setpointersforsensors | ( | type(enginetype), dimension(:), intent(in), target | eArr, |
| type(triadtype), dimension(:), intent(in), target | tArr, | ||
| type(springbasetype), dimension(:), intent(in), target | sArr, | ||
| type(damperbasetype), dimension(:), intent(in), target | dArr | ||
| ) |
Initialization of private pointers.
- Parameters
-
[in] eArr All functiontypemodule::enginetype objects in the model [in] tArr All triadtypemodule::triadtype objects in the model [in] sArr All springtypemodule::springbasetype objects in the model [in] dArr All dampertypemodule::damperbasetype objects in the model
This subroutine sets the private pointers of this module to point to the arrays provided as arguments (which should be those within the mechanismtypemodule::mechanismtype object). This is to avoid the necessity to transport these arrays through the enginevalue() and evalargs() calls, since they are needed by the subroutine updatesensor() which is invoked from evalargs().
- Date
- 6 Jun 2002
◆ updatedamperbase()
| recursive subroutine engineroutinesmodule::updatedamperbase | ( | type(damperbasetype), intent(inout) | dmp, |
| integer, intent(inout) | ierr | ||
| ) |
Updates the damper variables.
- Parameters
-
dmp The damper object to update the variables for ierr Error flag
- Note
- This may be an implicit recursive subroutine through the call sequence: -> enginevalue -> evalargs -> updatesensor -> updatedamperbase
- Date
- 6 Jun 2002
◆ updateenginesforsave()
| subroutine engineroutinesmodule::updateenginesforsave | ( | type(enginetype), dimension(:), intent(inout) | engines, |
| integer, intent(in) | eFlag, | ||
| integer, intent(out) | ierr | ||
| ) |
Update all engines and store the values for saving.
- Parameters
-
engines All general functions in the model [in] eFlag Update the functions whose saveVar equals this value [out] ierr Error flag
- Date
- 20 Jul 2004
◆ updatesensor()
| recursive subroutine engineroutinesmodule::updatesensor | ( | type(sensortype), intent(inout) | sensor, |
| integer, intent(inout) | ierr | ||
| ) |
Updates a sensor value depending on the sensor type.
- Parameters
-
sensor The sensor object to update the value for ierr Error flag
For many sensor types the actual sensor value is a pointer directly into the object it is evaluating, and this subroutine does nothing for such sensors.
- Note
- For some sensors of non-trivial type, this may be an implicit recursive subroutine through the call sequences: -> enginevalue --------------------\-> updatespringbase -> enginevalue -> evalargs -> updatesensor-> updatedamperbase /
- Date
- 6 Jun 2002
◆ updatespringbase()
| recursive subroutine engineroutinesmodule::updatespringbase | ( | type(springbasetype), intent(inout) | spr, |
| integer, intent(inout) | ierr | ||
| ) |
Updates the spring variables.
- Parameters
-
spr The spring object to update the variables for ierr Error flag
- Note
- This may be an implicit recursive subroutine through the call sequence: -> enginevalue -> evalargs -> updatesensor -> updatespringbase
- Date
- 6 Jun 2002
Variable Documentation
◆ dampers
|
private |
Private pointer to the corresponding member array in the mechanismtypemodule::mechanismtype object.
◆ engines
|
private |
Private pointer to the corresponding member array in the mechanismtypemodule::mechanismtype object.
◆ ispredictorstep
| logical, save engineroutinesmodule::ispredictorstep = .false. |
Flag used for consistent right-hand-side calculation in the predictor step.
Equals .true. in first iteration
◆ ourenvir
| type(environmenttype), pointer, save, public engineroutinesmodule::ourenvir => null() |
Public pointer to the environmental data member in the mechanismtypemodule::mechanismtype object.
◆ springs
|
private |
Private pointer to the corresponding member array in the mechanismtypemodule::mechanismtype object.
◆ triads
|
private |
Private pointer to the corresponding member array in the mechanismtypemodule::mechanismtype object.