Module with data types joint DOF friction objects. More...
Data Types | |
| type | frictionparametertype |
| Data type representing a set of friction parameters. More... | |
| type | frictiontype |
| Data type representing a joint DOF friction. More... | |
| type | frictionptrtype |
| Data type representing a friction object pointer. More... | |
| interface | getptrtoid |
| Returns pointer to object with specified ID. More... | |
| interface | writeobject |
| Standard routine for writing an object to file. More... | |
| interface | updateatconvergence |
| Updates the state variables pertaining to previous time step. More... | |
| interface | restorefromlaststep |
| Restores the state variables from the last converged time step. More... | |
Functions/Subroutines | |
| type(frictionparametertype) function, pointer | getptrtoidfrictionparametertype (array, id) |
| Returns pointer to friction parameters object with specified id. More... | |
| subroutine | writefrictiontype (friction, io, complexity) |
| Standard routine for writing an object to io. More... | |
| subroutine | writefrictionparametertype (fricData, io) |
| Standard routine for writing an object to io. More... | |
| subroutine | nullifyfriction (friction) |
| Initializes a friction object. More... | |
| subroutine | deallocatefrictionprms (frictions) |
| Deallocates an array of friction parameters objects. More... | |
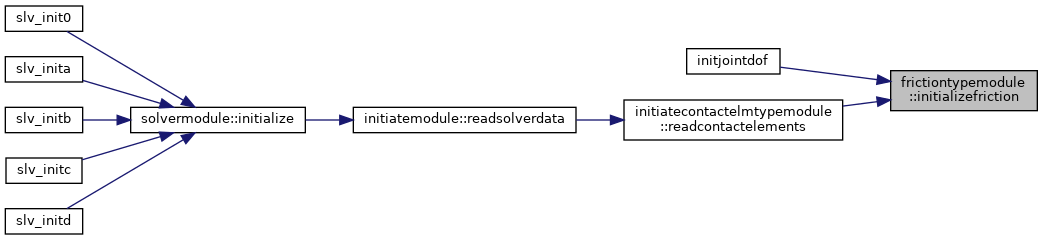
| subroutine | initializefriction (friction, frictionSets, frictionId, saveVar, err) |
| Allocates and initializes a friction object. More... | |
| subroutine | updatefrictionatstart (friction) |
| Initializes internal friction variables at the start of simulation. More... | |
| subroutine | updatefrictionatconvergence (friction) |
| Updates a friction object after convergence has been achieved. More... | |
| subroutine | restorefrictionfromlaststep (friction) |
| Restores a friction object from the last converged step. More... | |
Variables | |
| character(len=14), dimension(6), parameter | frictype_p = (/ 'ROT_FRICTION ', 'TRANS_FRICTION', 'CAM_FRICTION ', 'BALL_FRICTION ', 'BALL_FRICTION2', 'GENERIC_ENGINE' /) |
| Friction type names. More... | |
| real(dp), save | fricforcetol = 0.0_dp |
| Zero tolerance for friction forces. More... | |
Detailed Description
Module with data types joint DOF friction objects.
The module also contains subroutines for accessing the frictions.
Function/Subroutine Documentation
◆ deallocatefrictionprms()
| subroutine frictiontypemodule::deallocatefrictionprms | ( | type(frictionparametertype), dimension(:), pointer | frictions | ) |
Deallocates an array of friction parameters objects.
- Parameters
-
frictions The frictiontypemodule::frictionparametertype objects to deallocate
- Date
- 23 Jan 2017
◆ getptrtoidfrictionparametertype()
| type(frictionparametertype) function, pointer frictiontypemodule::getptrtoidfrictionparametertype | ( | type(frictionparametertype), dimension(:), intent(in), target | array, |
| integer, intent(in) | id | ||
| ) |
Returns pointer to friction parameters object with specified id.
- Parameters
-
[in] array Array of frictiontypemodule::frictionparametertype objects to search within [in] id Base ID of the object to search for
If the friction parameters object is not found, NULL is returned.
- Date
- 1 Nov 1999
◆ initializefriction()
| subroutine frictiontypemodule::initializefriction | ( | type(frictiontype), pointer | friction, |
| type(frictionparametertype), dimension(:), intent(in) | frictionSets, | ||
| integer, intent(in) | frictionId, | ||
| integer, dimension(:), intent(in) | saveVar, | ||
| integer, intent(out) | err | ||
| ) |
Allocates and initializes a friction object.
- Parameters
-
[out] friction The frictiontypemodule::frictionparameterttype object to allocate/initialize [in] frictionSets All friction parameters objects in the model [in] frictionId Base id of the friction parameters object to use [in] saveVar Flags indicating which variables should be saved [out] err Error flag
- Date
- 28 Aug 2002
◆ nullifyfriction()
| subroutine frictiontypemodule::nullifyfriction | ( | type(frictiontype), intent(out) | friction | ) |
Initializes a friction object.
- Parameters
-
[out] friction The frictiontypemodule::frictionttype object to initialize
- Date
- 16 Jun 2006
◆ restorefrictionfromlaststep()
| subroutine frictiontypemodule::restorefrictionfromlaststep | ( | type(frictiontype), intent(inout) | friction | ) |
Restores a friction object from the last converged step.
- Parameters
-
friction The friction object to restore
- Date
- 2 Nov 2008
◆ updatefrictionatconvergence()
| subroutine frictiontypemodule::updatefrictionatconvergence | ( | type(frictiontype), intent(inout) | friction | ) |
Updates a friction object after convergence has been achieved.
- Parameters
-
friction The friction object to update
- Date
- 3 Oct 2005
◆ updatefrictionatstart()
| subroutine frictiontypemodule::updatefrictionatstart | ( | type(frictiontype), intent(inout) | friction | ) |
Initializes internal friction variables at the start of simulation.
- Parameters
-
friction The friction object to initialize internal variables for
- Date
- 24 Oct 2005

◆ writefrictionparametertype()
| subroutine frictiontypemodule::writefrictionparametertype | ( | type(frictionparametertype), intent(in) | fricData, |
| integer, intent(in) | io | ||
| ) |
Standard routine for writing an object to io.
- Parameters
-
[in] fricData The frictiontypemodule::frictionparametertype object to write [in] io File unit number to write to
- Date
- Sep 1999
◆ writefrictiontype()
| subroutine frictiontypemodule::writefrictiontype | ( | type(frictiontype), intent(in) | friction, |
| integer, intent(in) | io, | ||
| integer, intent(in), optional | complexity | ||
| ) |
Standard routine for writing an object to io.
- Parameters
-
[in] friction The frictiontypemodule::frictiontype object to write [in] io File unit number to write to [in] complexity If present, the value indicates the amount of print
- Date
- Sep 1999
Variable Documentation
◆ fricforcetol
| real(dp), save frictiontypemodule::fricforcetol = 0.0_dp |
Zero tolerance for friction forces.
◆ frictype_p
| character(len=14), dimension(6), parameter frictiontypemodule::frictype_p = (/ 'ROT_FRICTION ', 'TRANS_FRICTION', 'CAM_FRICTION ', 'BALL_FRICTION ', 'BALL_FRICTION2', 'GENERIC_ENGINE' /) |
Friction type names.