Module with model containers and top lever driver subroutines. More...
Functions/Subroutines | |
| subroutine, public | initialize (chfsi, stateData, ndat, xinp, nxinp, ierr) |
| Initializes the simulation model. More... | |
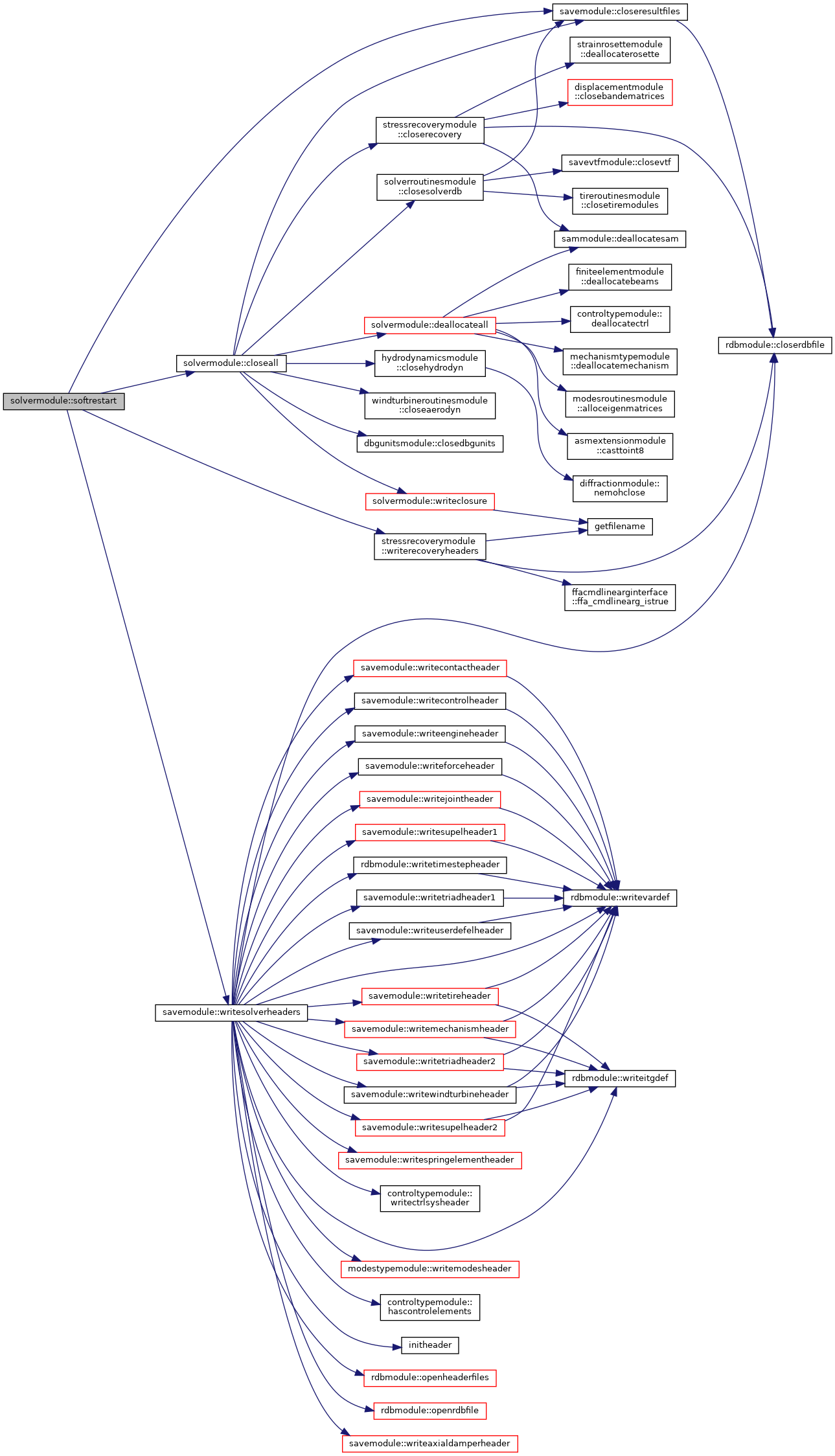
| subroutine, public | softrestart (stateData, ndat, writeToRDB, ierr) |
| Restarts a running simulation model from the provided state. More... | |
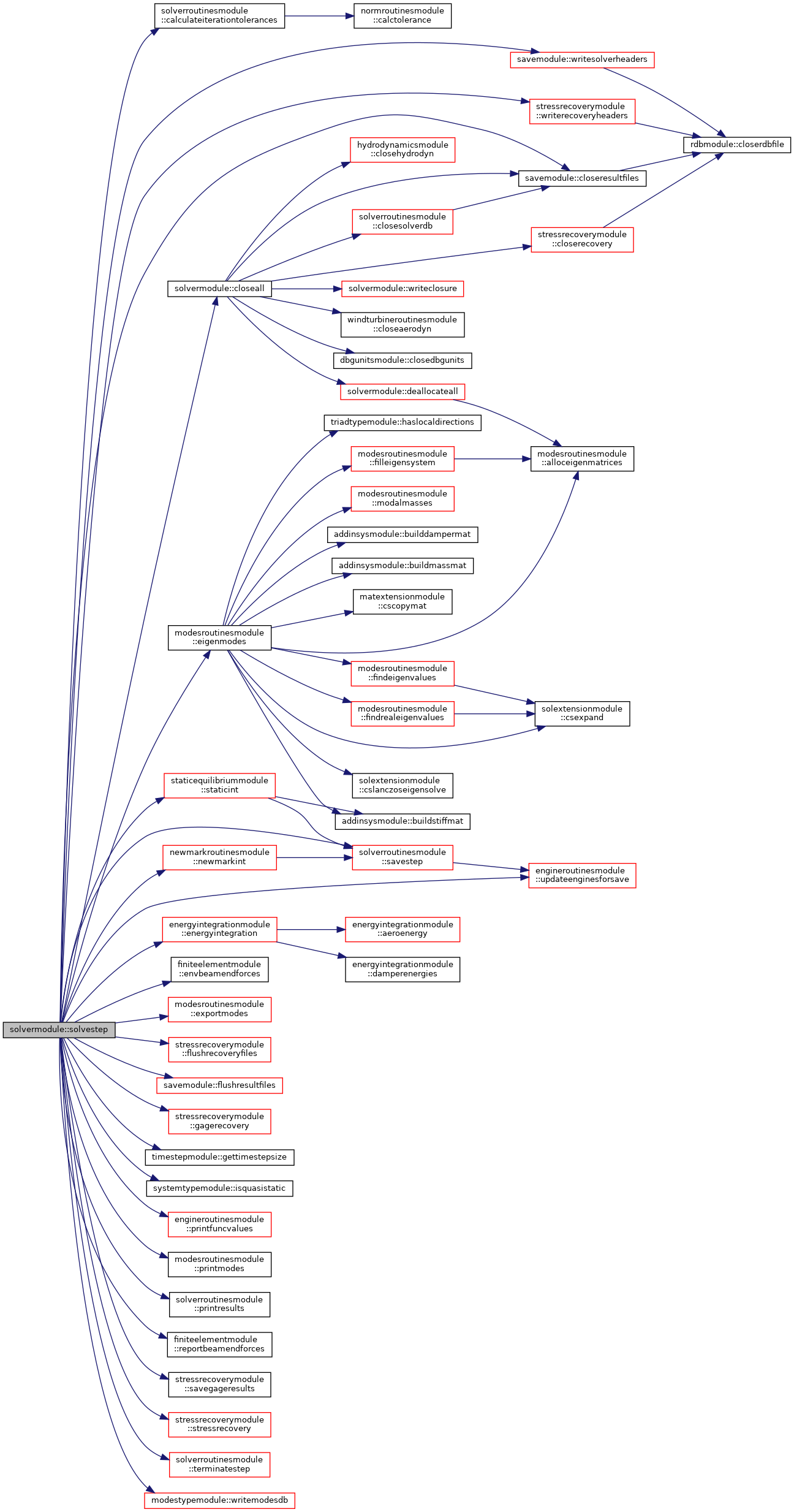
| subroutine, public | solvestep (iop, finalStep, finished, ierr) |
| Solves for the next time step or iteration. More... | |
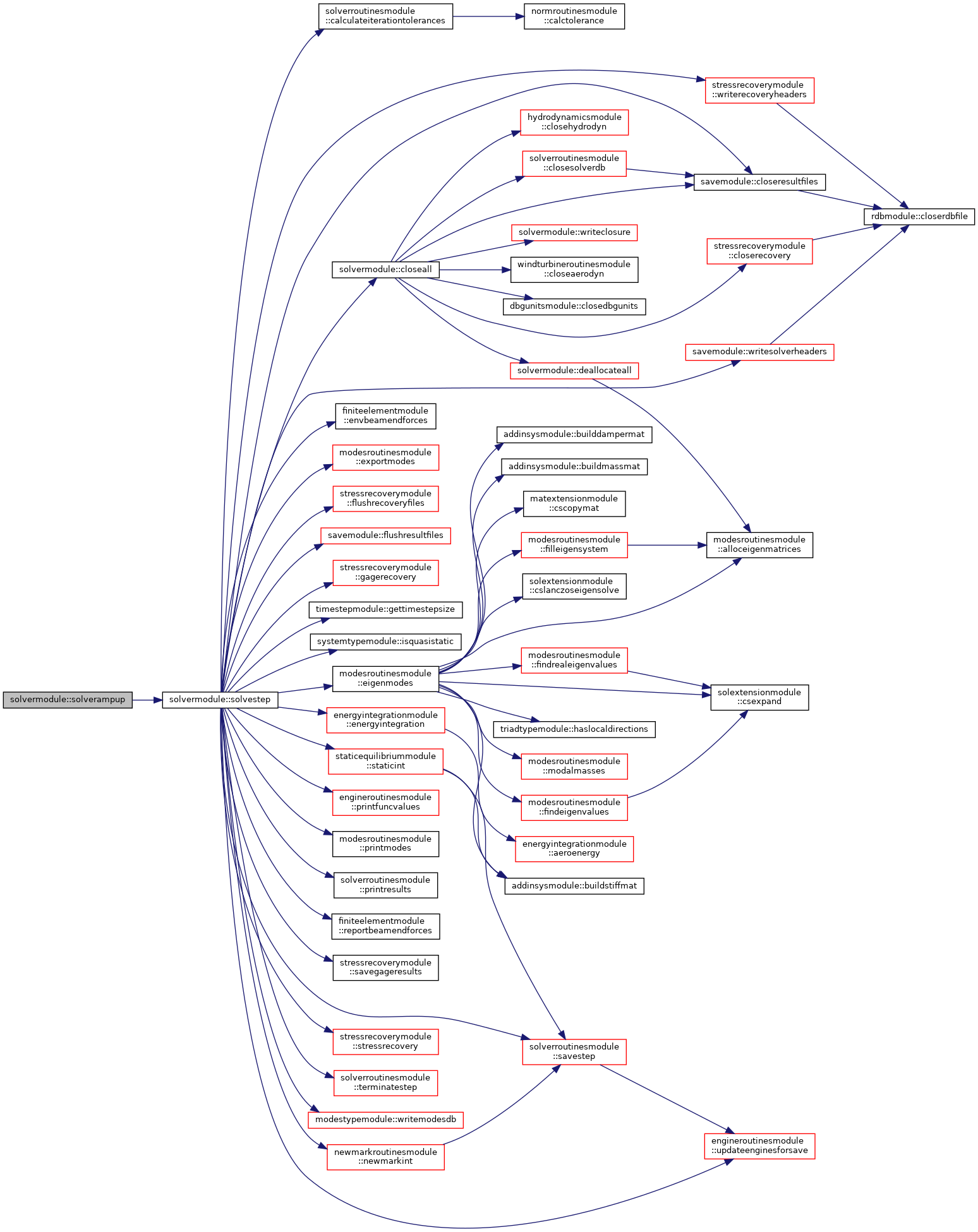
| subroutine, public | solverampup (iop, finished, ierr) |
| Solves the ramp-up stage, if any. More... | |
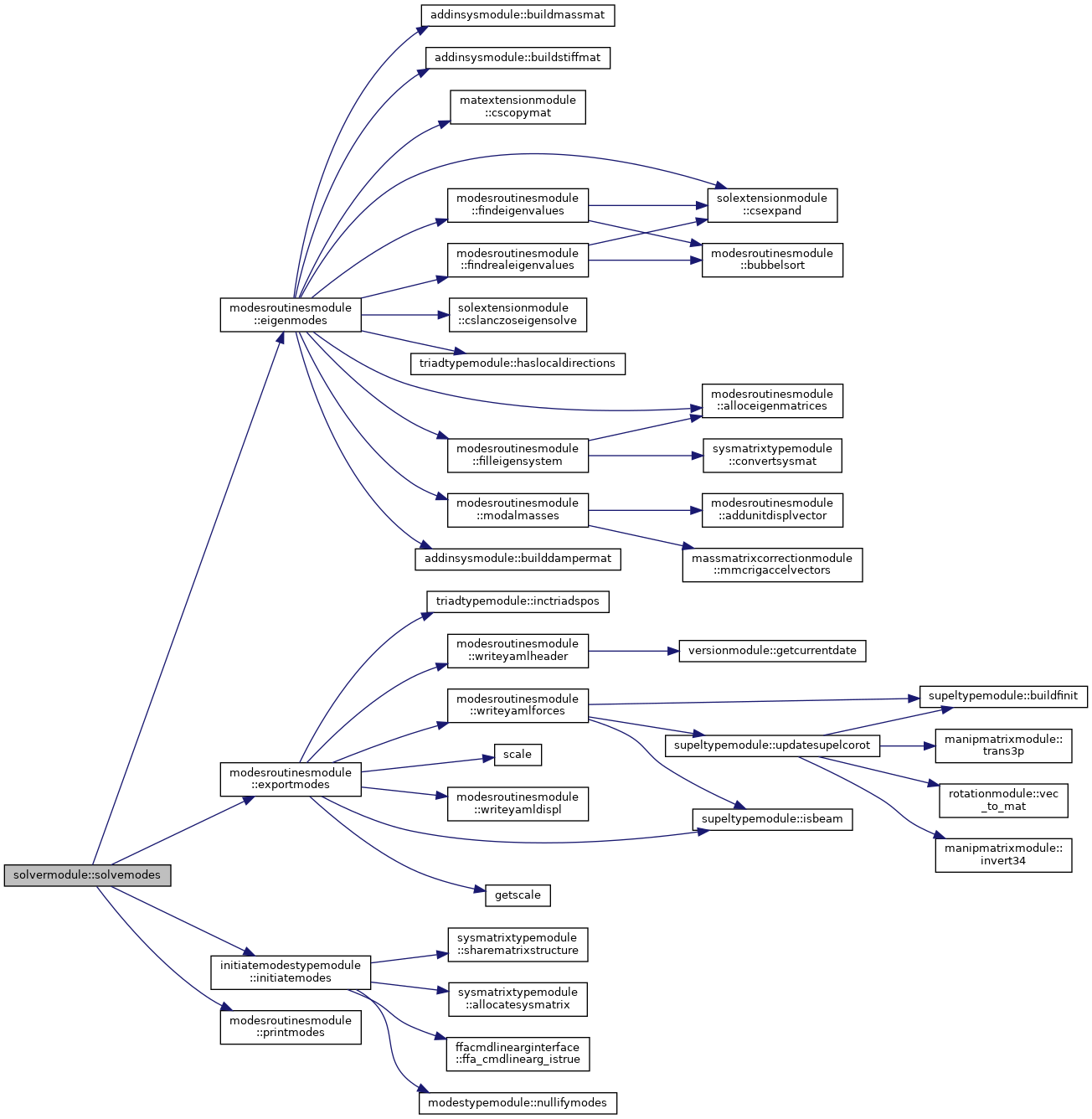
| subroutine, public | solvemodes (nModes, eVal, eVec, dofOrder, useLaPack, ierr) |
| Solves the eigenvalue system at current configuration. More... | |
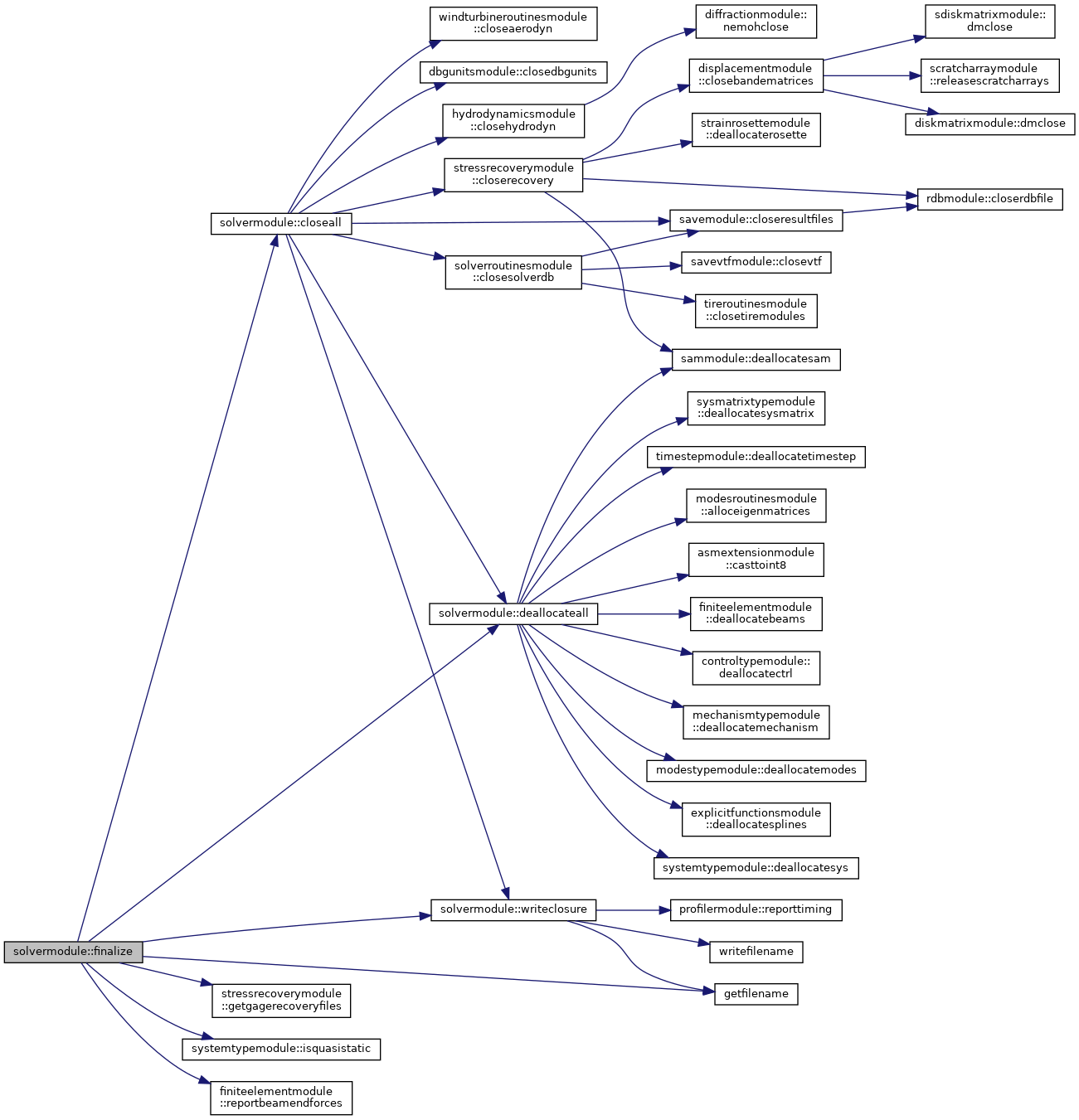
| subroutine, public | finalize (ierr) |
| Terminates the simulation and close the result database. More... | |
| subroutine, public | closeall (ierr, abortsub) |
| Closes the result database files and any external modules used. More... | |
| subroutine | writeclosure (lcon, ierr) |
| Outputs file and profiling information on program termination. More... | |
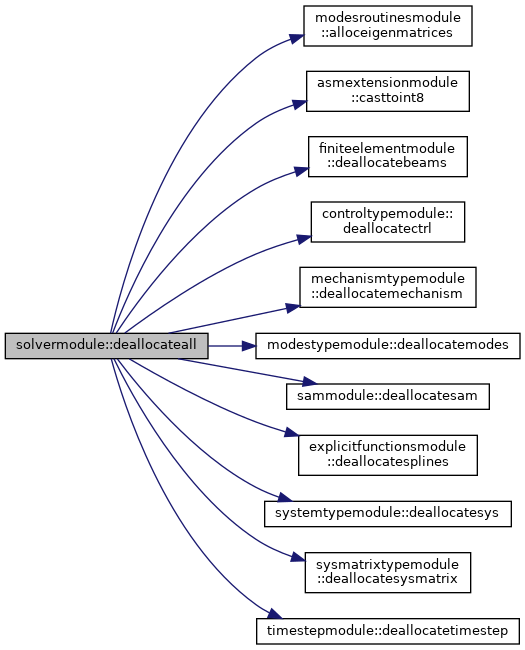
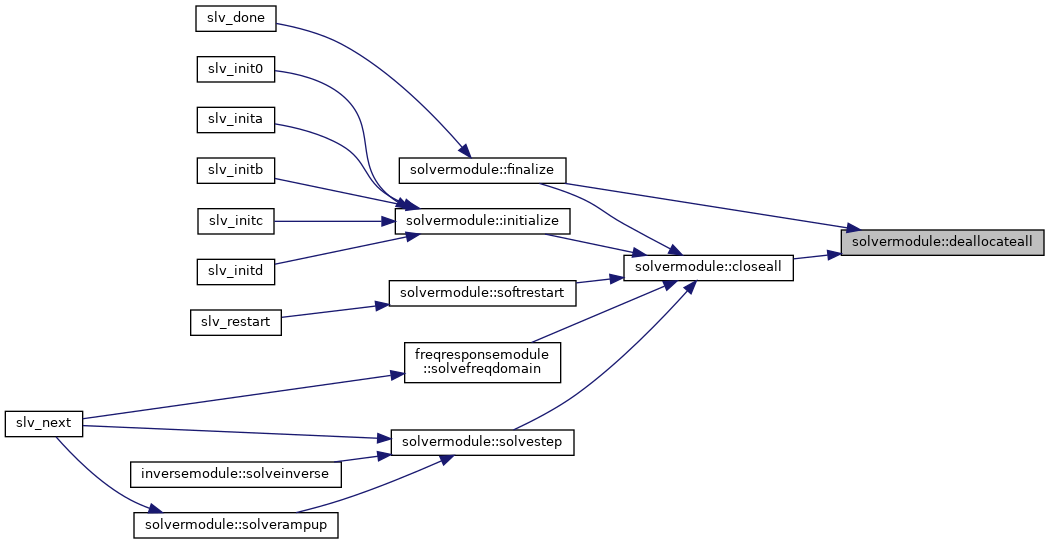
| subroutine | deallocateall () |
| Deallocates all dynamically allocated data. More... | |
| logical function, public | solvedynamic () |
| Returns whether the next step should be solved dynamically or not. More... | |
| integer function, public | haveresults () |
| Returns whether current step have results to be saved. More... | |
| subroutine, public | gettime (time, tflag, ierr) |
| Returns the physical time of a specified simulation state. More... | |
| subroutine, public | setnewtime (nextTime, ierr) |
| Sets the time increment size to be used for next time step. More... | |
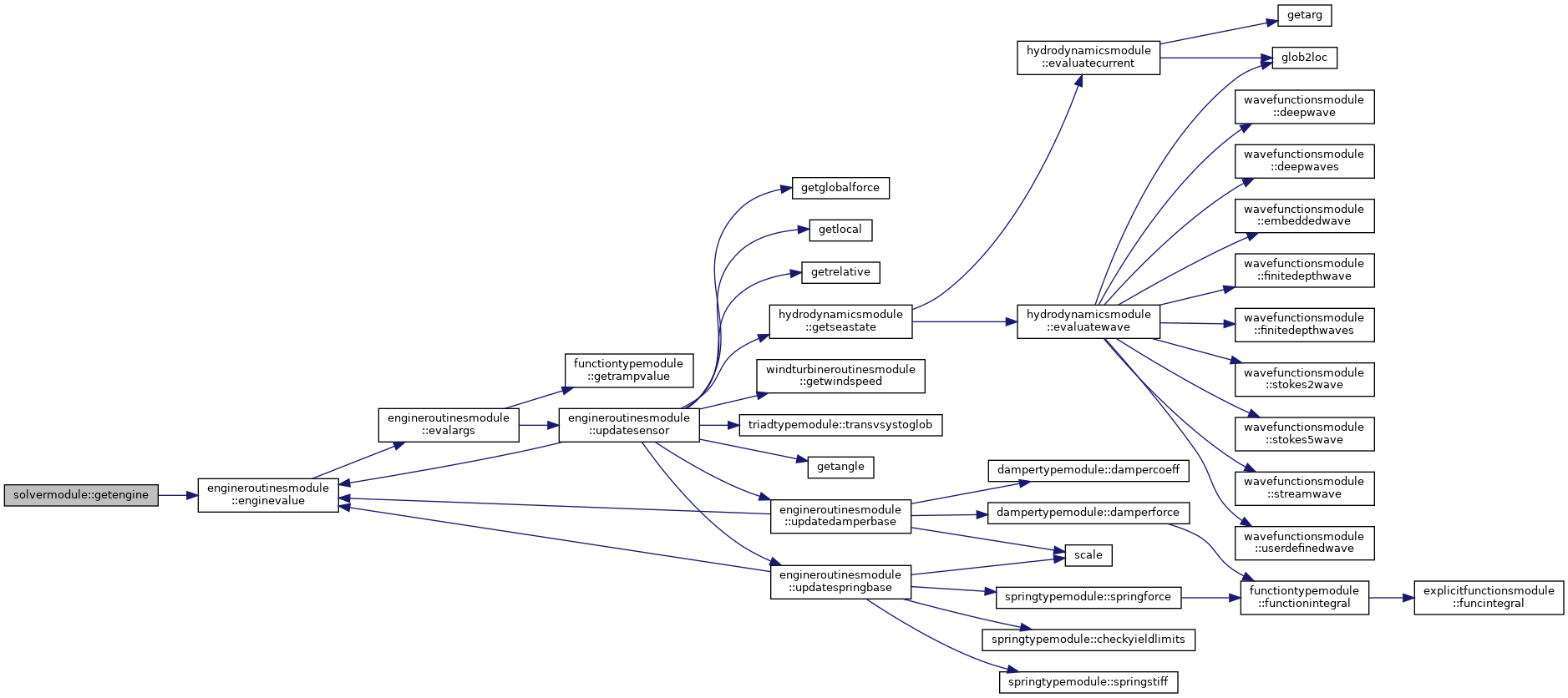
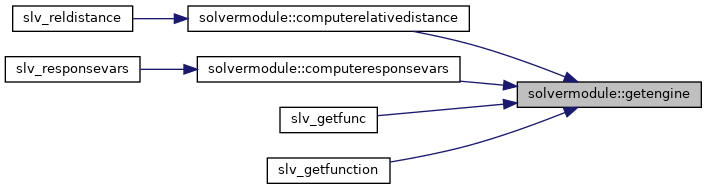
| subroutine, public | getengine (value, ierr, userId, tag, x) |
| Returns the current value of the specified engine. More... | |
| integer function, public | getengineid (tag) |
| Returns the user Id of the (first) engine with the specified tag. More... | |
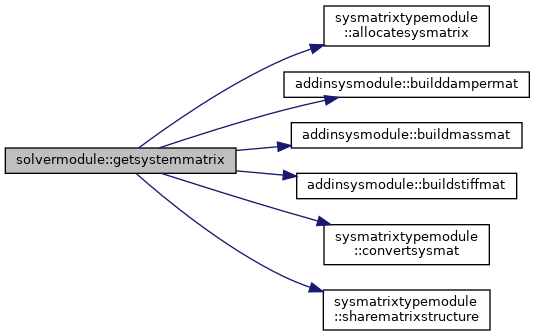
| subroutine, public | getsystemmatrix (Nmat, iopM, ierr) |
| Returns a system matrix as a full matrix. More... | |
| subroutine, public | getelementmatrix (Emat, baseId, iopM, ierr) |
| Returns an element matrix for the specified superelement. More... | |
| subroutine, public | getrhsvector (Rvec, iopV, ierr) |
| Returns the current right-hand-side vector of the linearized system. More... | |
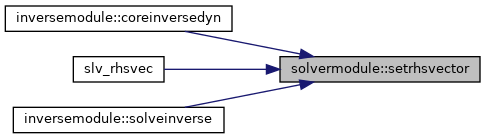
| subroutine, public | setrhsvector (Rvec, addTo, keepDuringIterations, ierr) |
| Sets/Updates current right-hand-side vector of linearized system. More... | |
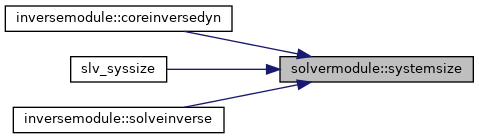
| subroutine, public | systemsize (ndim, expanded) |
| Returns the dimension of the linearized system. More... | |
| subroutine, public | solverparameters (dt, alpha, beta, gamma) |
| Returns parameters for the Newmark/HHT-algorithm. More... | |
| subroutine, public | objectequations (baseId, meqn, ndof) |
| Returns the equation numbers for the specified object. More... | |
| subroutine, public | objectstatevar (baseId, vars, nVar) |
| Returns the current state variables for the specified object. More... | |
| subroutine, public | solvelineqsystem (rhs, nrhs, ierr) |
| Solves current linear equation system for a set of right-hand-sides. More... | |
| subroutine, public | statevectorsize (transOnly, ndat) |
| Returns the dimension of the state vector. More... | |
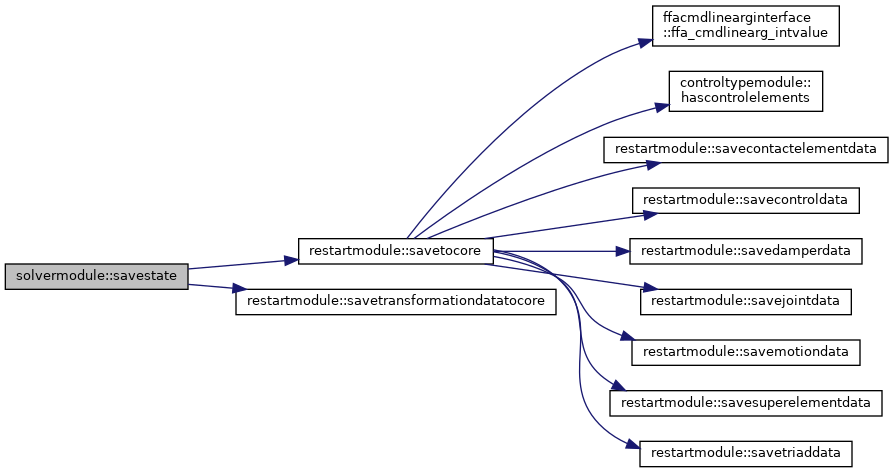
| subroutine, public | savestate (transOnly, stateData, ndat, ierr) |
| Saves current state to an in-core array. More... | |
| subroutine, public | partstatevectorsize (iopS, bid, ndat) |
| Returns the state vector dimension for a FE part. More... | |
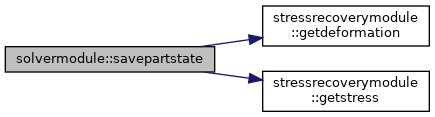
| subroutine, public | savepartstate (iopS, bid, data, ndat, ierr) |
| Saves the deformation/stress state of a FE part to an in-core array. More... | |
| subroutine, public | straingagessize (ndat) |
| Returns the dimension of the strain gages vector. More... | |
| subroutine, public | saveinitgagestrains (iopS, data, ndat, ierr) |
| Save/restores the initial gage strain to/from an in-core array. More... | |
| subroutine, public | computegagestrains (disp, gageIds, nDisp, nGage, eps, ierr) |
| Computes strain tensor at gage positions for input displacements. More... | |
| subroutine, public | computebeamforces (disp, beamIds, nDofs, nBeams, forces, ierr) |
| Computes beam sectional forces for input displacements. More... | |
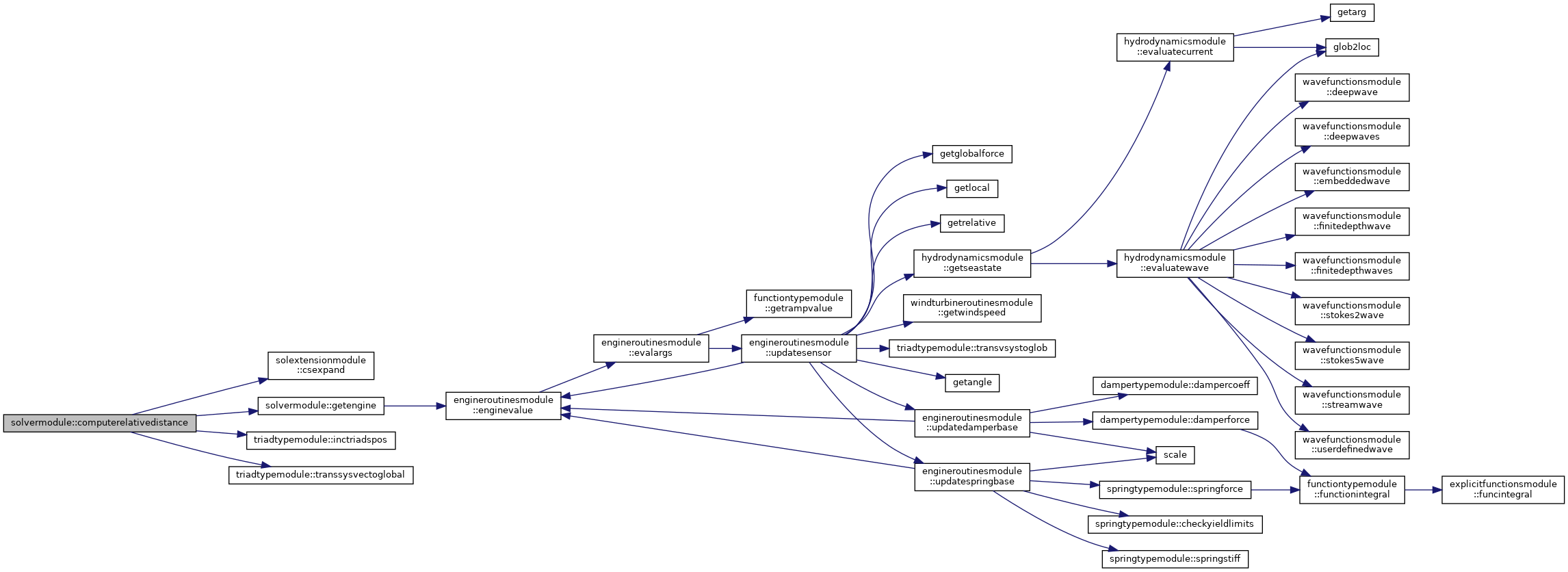
| subroutine, public | computerelativedistance (disp, Ids, relDis, nDofs, nIds, ierr) |
| Computes relative distance between 2 triads for input displacements. More... | |
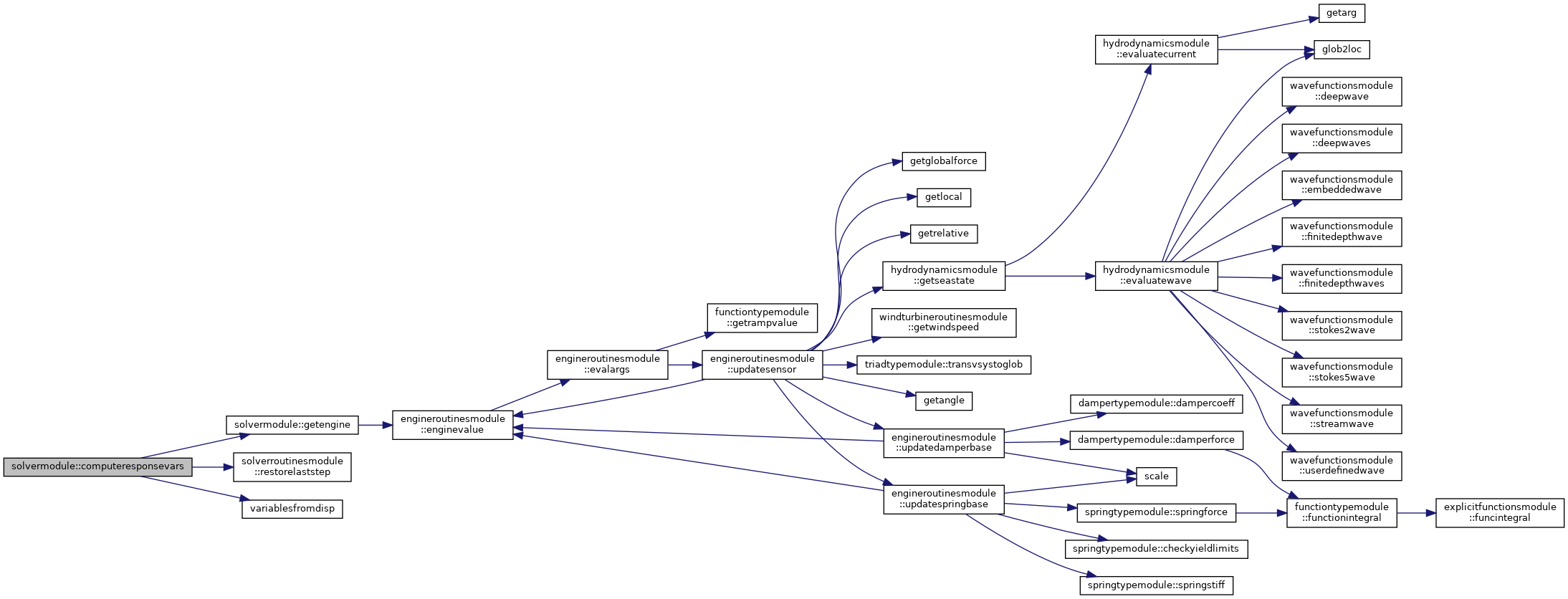
| subroutine, public | computeresponsevars (disp, Ids, resp, nDofs, nIds, ierr) |
| Computes response variables for input displacements. More... | |
| subroutine, public | getjointspringstiffness (sprCoeff, bid, ierr) |
| Gets spring stiffness coefficients for a joint. More... | |
Variables | |
| type(samtype), save, public | sam |
| Data for managing system matrix assembly. More... | |
| type(modestype), save | modes |
| Data for eigenmodes. More... | |
| type(systemtype), save, public | sys |
| System level model data. More... | |
| type(controltype), save | ctrl |
| Control system data. More... | |
| type(mechanismtype), save, public | mech |
| Mechanism objects of the model. More... | |
| type(sysmatrixtype), save | amat |
| System matrix for external communication. More... | |
| real(dp), dimension(:), allocatable, save | extrhs |
| Externally set load vector. More... | |
| character(len=lfnam_p), save | chmodel |
| Model file name. More... | |
| character(len=lfnam_p), dimension(5), save | chnames |
| Result database file names. More... | |
| character(len=lfnam_p), save | yamlfile |
| Mode shape file name. More... | |
| character(len=:), allocatable, save | frsnames |
| Recovery result files. More... | |
Detailed Description
Module with model containers and top lever driver subroutines.
This module contains all model data and the top-level subroutines of the FEDEM Dynamics solver. It replaces the old top-level driver subroutine of version R7.2 and earlier. The new driver is divided into three main parts:
- initialize() - Reads the input files and sets up everything.
- solvestep() - Advances the dynamic solution one step forward.
- finalize() - Closes down the result database after successful termination.
In addition, this module contains several utility subroutines for external manipulation of the solution process through the solver API.
Function/Subroutine Documentation
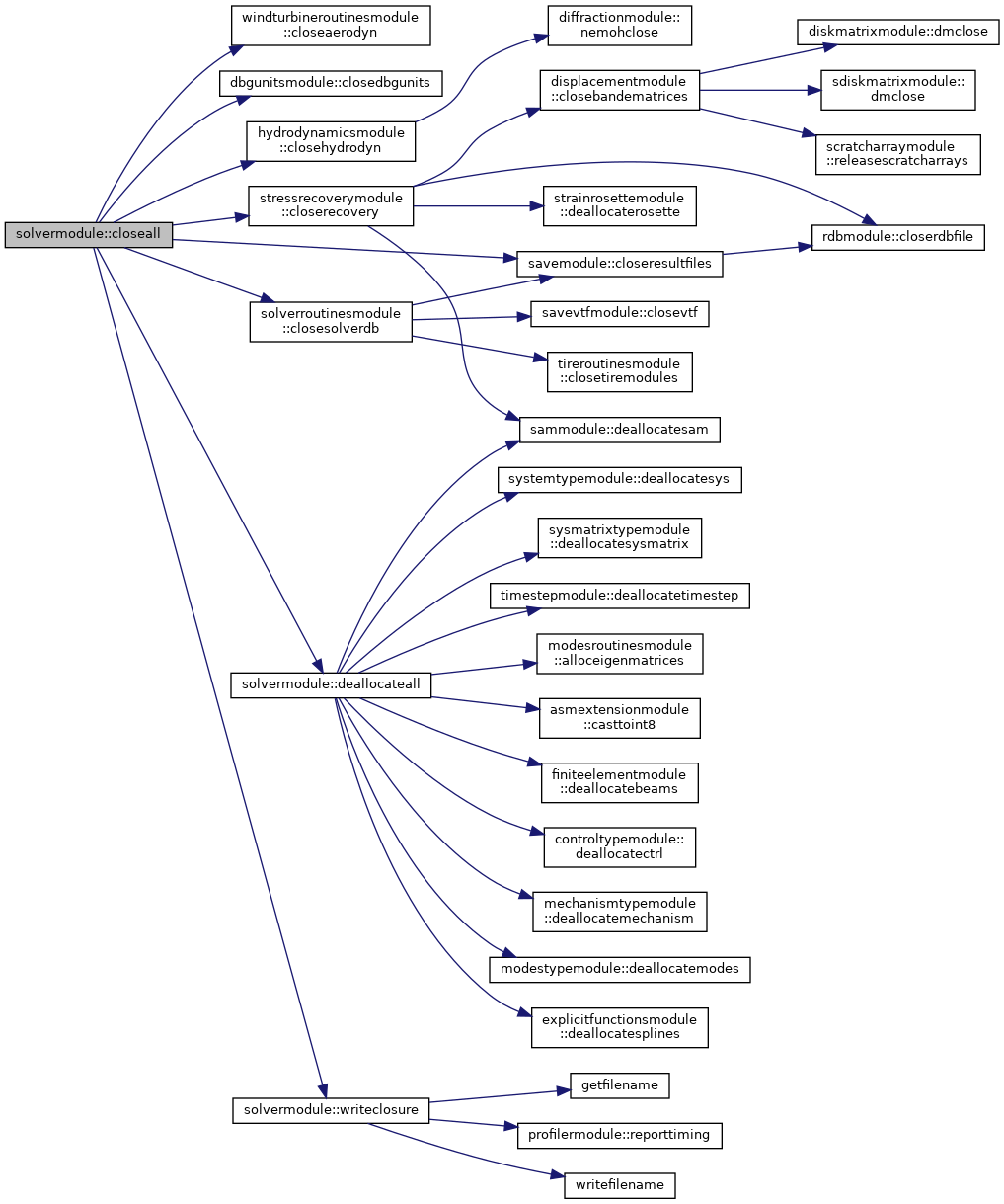
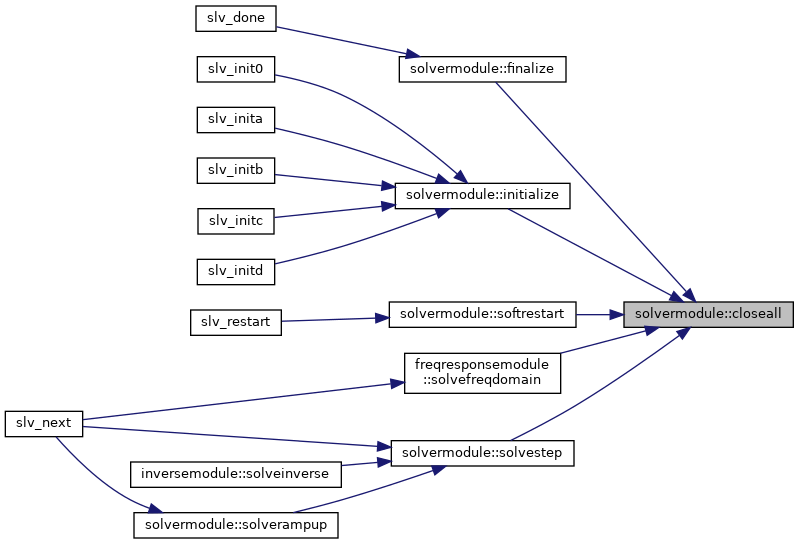
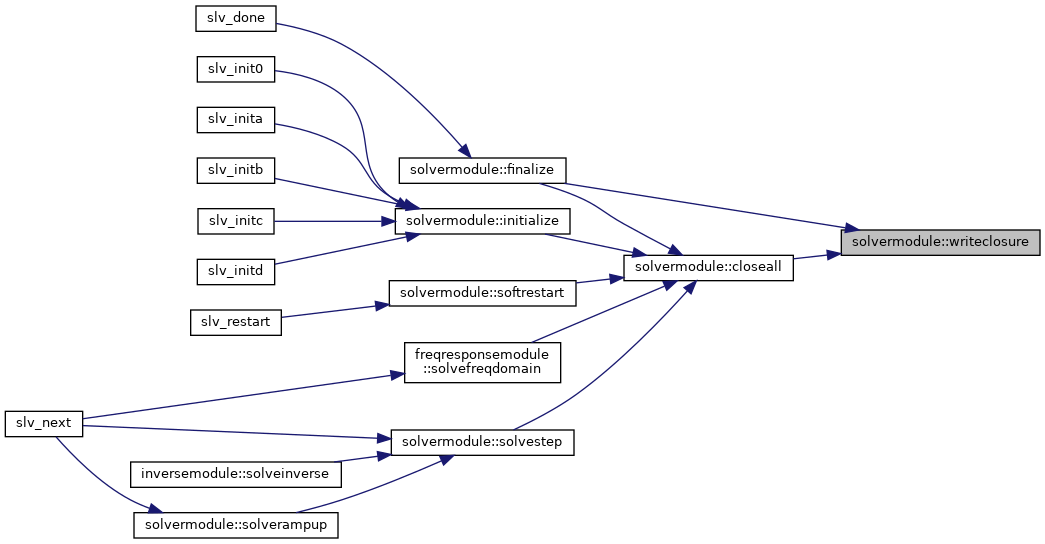
◆ closeall()
| subroutine, public solvermodule::closeall | ( | integer, intent(inout) | ierr, |
| character(len=*), intent(in), optional | abortsub | ||
| ) |
Closes the result database files and any external modules used.
- Parameters
-
ierr Error flag [in] abortsub If present, gives the name of the aborting subroutine
- Date
- 30 Nov 2016
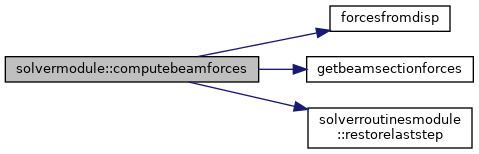
◆ computebeamforces()
| subroutine, public solvermodule::computebeamforces | ( | real(dp), dimension(*), intent(in) | disp, |
| integer, dimension(*), intent(in) | beamIds, | ||
| integer, intent(in) | nDofs, | ||
| integer, intent(in) | nBeams, | ||
| real(dp), dimension(*), intent(out) | forces, | ||
| integer, intent(out) | ierr | ||
| ) |
Computes beam sectional forces for input displacements.
- Parameters
-
[in] disp Displacement vector [in] beamIds Base IDs of the beams/triads to calculate for [in] nDofs Length of displacement vector [in] nBeams Length of beam identifier array [out] forces Beam sectional forces [out] ierr Error flag
The array beamIds contains triplets of (beamId, triadId, dof), where triadId is the base ID of one of the two end triads of the beam element, and dof is a zero-based force component index (-1 implies all). This subroutine always returns all force components, i.e., the dof index is not used here.
- Date
- 20 Sep 2020

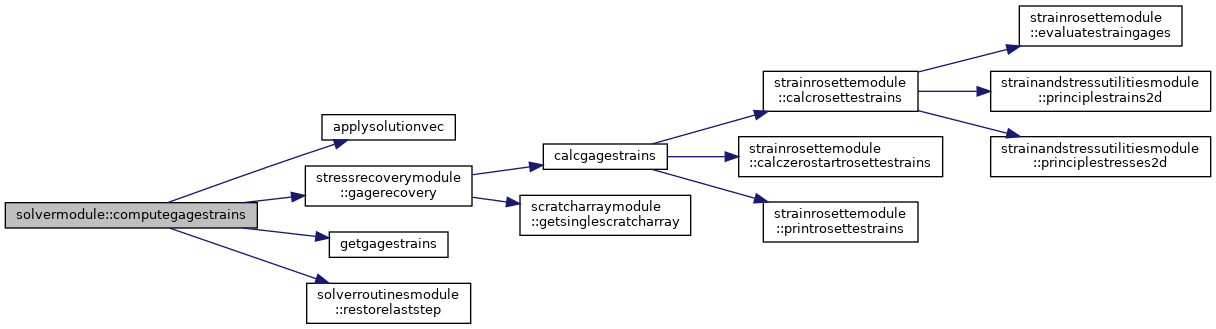
◆ computegagestrains()
| subroutine, public solvermodule::computegagestrains | ( | real(dp), dimension(*), intent(in) | disp, |
| integer, dimension(*), intent(in) | gageIds, | ||
| integer, intent(in) | nDisp, | ||
| integer, intent(in) | nGage, | ||
| real(dp), dimension(*), intent(out) | eps, | ||
| integer, intent(out) | ierr | ||
| ) |
Computes strain tensor at gage positions for input displacements.
- Parameters
-
[in] disp Displacement vector [in] gageIds Base IDs of strain gages to calculate for [in] nDisp Length of displacement vector (if 0, use internal state) [in] nGage Length of gageIds array (number of strain gages) [out] eps Strain tensors at gage positions [out] ierr Error flag
- Date
- 9 Sep 2020

◆ computerelativedistance()
| subroutine, public solvermodule::computerelativedistance | ( | real(dp), dimension(*), intent(in) | disp, |
| integer, dimension(*), intent(in) | Ids, | ||
| real(dp), dimension(*), intent(out) | relDis, | ||
| integer, intent(in) | nDofs, | ||
| integer, intent(in) | nIds, | ||
| integer, intent(out) | ierr | ||
| ) |
Computes relative distance between 2 triads for input displacements.
- Parameters
-
[in] disp Displacement vector [in] Ids User IDs of the functions with relative sensors [out] relDis Relative distances [in] nDofs Length of displacement vector [in] nIds Length of function identifier array [out] ierr Error flag
- Date
- 22 Oct 2020

◆ computeresponsevars()
| subroutine, public solvermodule::computeresponsevars | ( | real(dp), dimension(*), intent(in) | disp, |
| integer, dimension(*), intent(in) | Ids, | ||
| real(dp), dimension(*), intent(out) | resp, | ||
| integer, intent(in) | nDofs, | ||
| integer, intent(in) | nIds, | ||
| integer, intent(out) | ierr | ||
| ) |
Computes response variables for input displacements.
- Parameters
-
[in] disp Displacement vector [in] Ids User IDs of the functions with response quantities [out] resp Response variable values [in] nDofs Length of displacement vector [in] nIds Length of function identifier array [out] ierr Error flag
- Date
- 6 June 2023

◆ deallocateall()
|
private |
Deallocates all dynamically allocated data.
- Date
- 23 Jan 2017
◆ finalize()
| subroutine, public solvermodule::finalize | ( | integer, intent(out) | ierr | ) |
Terminates the simulation and close the result database.
- Parameters
-
[out] ierr Error flag
This subroutine is invoked after the time integration has completed successfully, and there are no more calculations to be performed. Its main task is to close down the result database, but it also performs the automatic curve export when that has been requested.
- Date
- 30 Nov 2016

◆ getelementmatrix()
| subroutine, public solvermodule::getelementmatrix | ( | real(dp), dimension(*), intent(out) | Emat, |
| integer, intent(in) | baseId, | ||
| integer, intent(in) | iopM, | ||
| integer, intent(out) | ierr | ||
| ) |
Returns an element matrix for the specified superelement.
- Parameters
-
[out] Emat The element matrix [in] baseId Base ID of the superelement to return the matrix for [in] iopM Option telling which matrix to return (see below) [out] ierr Error flag
The value of iopM is iterpreted as follows:
- = 1 : Return the element stiffness matrix
- = 2 : Return the element mass matrix
- = 3 : Return the element damping matrix
- Date
- 16 Feb 2018

◆ getengine()
| subroutine, public solvermodule::getengine | ( | real(dp), intent(out) | value, |
| integer, intent(inout) | ierr, | ||
| integer, intent(in) | userId, | ||
| character(len=*), intent(in), optional | tag, | ||
| real(dp), intent(in), optional | x | ||
| ) |
Returns the current value of the specified engine.
- Parameters
-
[out] value The function value ierr Error flag [in] userId User ID of the engine to evaluate [in] x Optional function argument value [in] tag Optional tag to identify the engine with
If an engine with userId is found, the value of that engine is returned. Otherwise, the (first) engine with a matching tag is used. If no engine with the given identification is found, zero is returned. The error flag is decrementend on failure, othwerwise it is not touched.
- Date
- 5 Dec 2016
◆ getengineid()
| integer function, public solvermodule::getengineid | ( | character(len=*), intent(in) | tag | ) |
Returns the user Id of the (first) engine with the specified tag.
- Parameters
-
[in] tag Tag to identify the engine with
- Returns
- User ID of tagged function, or -1 if not found
- Date
- 25 Jun 2022

◆ getjointspringstiffness()
| subroutine, public solvermodule::getjointspringstiffness | ( | real(dp), dimension(*), intent(out) | sprCoeff, |
| integer, intent(in) | bid, | ||
| integer, intent(out) | ierr | ||
| ) |
Gets spring stiffness coefficients for a joint.
- Parameters
-
[out] sprCoeff Spring stiffness coefficients [in] bid Base ID of joint [out] ierr Error flag
- Date
- 20 June 2023

◆ getrhsvector()
| subroutine, public solvermodule::getrhsvector | ( | real(dp), dimension(sam%neq), intent(out) | Rvec, |
| integer, intent(in) | iopV, | ||
| integer, intent(out) | ierr | ||
| ) |
Returns the current right-hand-side vector of the linearized system.
- Parameters
-
[out] Rvec The right-hand-side vector [in] iopV If equal to 1, return current external load vector instead [out] ierr Error flag
- Date
- 30 Mar 2017

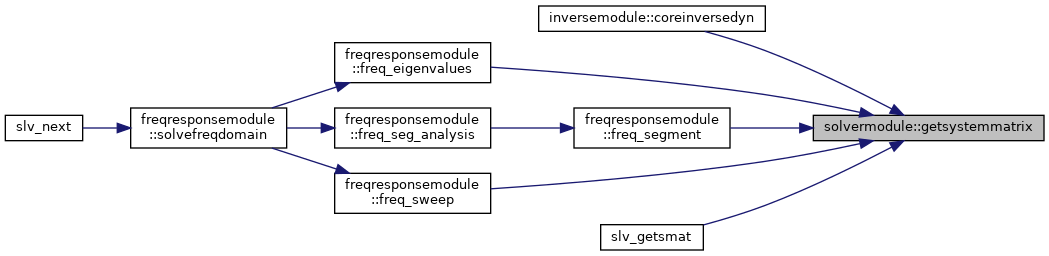
◆ getsystemmatrix()
| subroutine, public solvermodule::getsystemmatrix | ( | real(dp), dimension(sam%neq,sam%neq), intent(out) | Nmat, |
| integer, intent(in) | iopM, | ||
| integer, intent(out) | ierr | ||
| ) |
Returns a system matrix as a full matrix.
- Parameters
-
[out] Nmat The system matrix [in] iopM Option telling which matrix to return (see below) [out] ierr Error flag
The value of iopM is iterpreted as follows:
- = 1 : Return the system stiffness matrix
- = 2 : Return the system mass matrix
- = 3 : Return the system damping matrix
- > 3 : Return the current system Newton matrix
- Date
- 30 Mar 2017
◆ gettime()
| subroutine, public solvermodule::gettime | ( | real(dp), intent(out) | time, |
| integer, intent(in) | tflag, | ||
| integer, intent(inout) | ierr | ||
| ) |
Returns the physical time of a specified simulation state.
- Parameters
-
[out] time The physical time value [in] tflag Flag indicating which time step to return for - 0 : Return for current time step
- 1 : Return for next time step
- 2 : Return the start time of the simulation
- 3 : Return the stop time of the simulation
ierr Error flag, untouched unless tflag = 1
This subroutine does not always work with tflag = 1 if cut-back is performed, as the time step size then might be decreased.
- Date
- 5 Dec 2016


◆ haveresults()
| integer function, public solvermodule::haveresults |
Returns whether current step have results to be saved.
- Date
- 6 Dec 2024

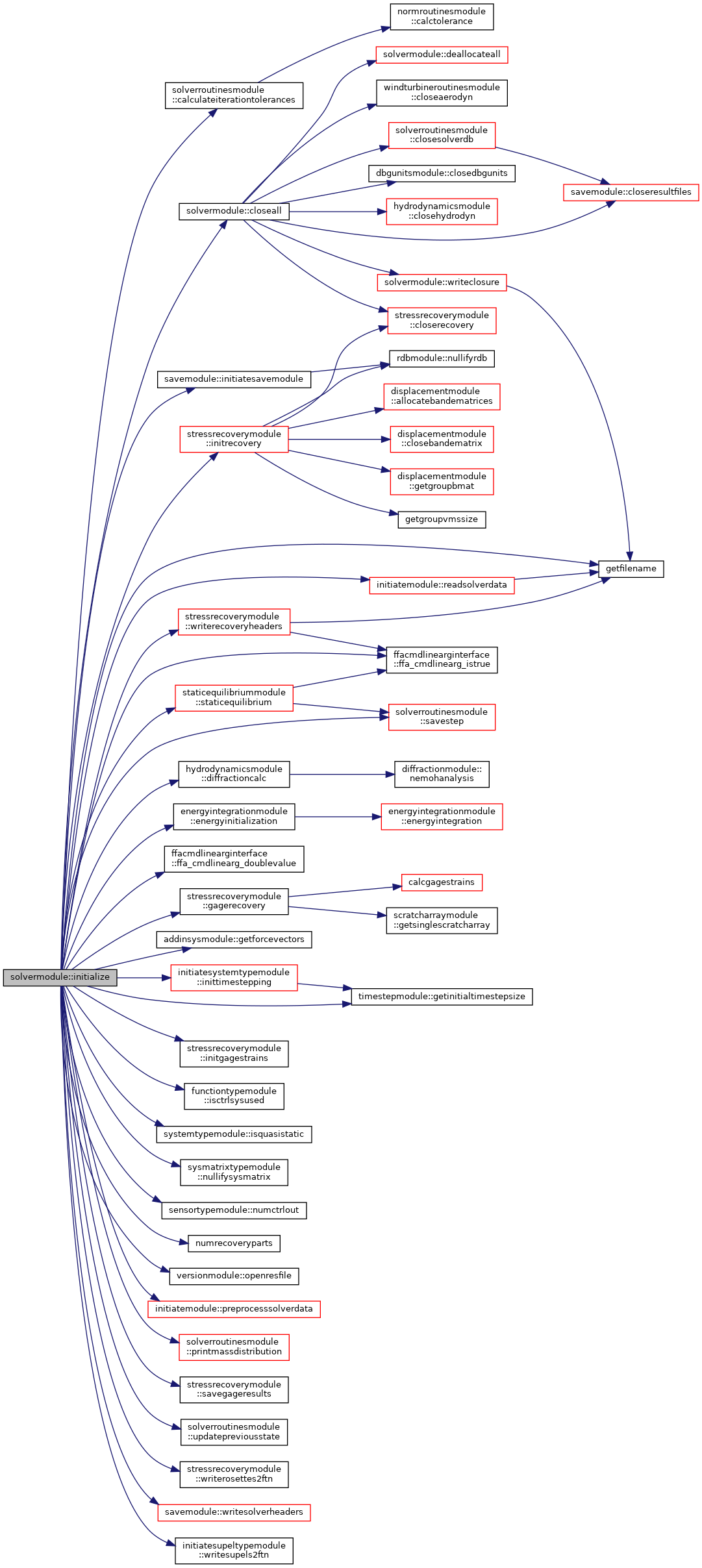
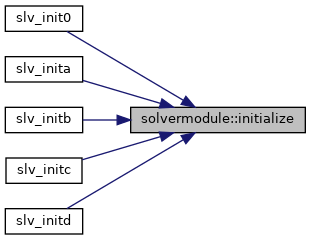
◆ initialize()
| subroutine, public solvermodule::initialize | ( | character(len=*), intent(in), optional | chfsi, |
| real(dp), dimension(*), intent(in), optional | stateData, | ||
| integer, intent(in), optional | ndat, | ||
| real(dp), dimension(*), intent(in), optional | xinp, | ||
| integer, intent(inout), optional | nxinp, | ||
| integer, intent(out) | ierr | ||
| ) |
Initializes the simulation model.
- Parameters
-
[in] chfsi Text string containing the model definition [in] stateData Current state to restart from [in] ndat Length of the stateData array [in] xinp External function values for initial state nxinp Number of external function values to extract/extracted [out] ierr Error flag
This subroutine reads and sets up a new simulation model, defines the initial configuration and initializes the result database. It also handles restart, both from file and from a solution state provided as argument.
- Date
- 30 Nov 2016
◆ objectequations()
| subroutine, public solvermodule::objectequations | ( | integer, intent(in) | baseId, |
| integer, dimension(*), intent(out) | meqn, | ||
| integer, intent(out) | ndof | ||
| ) |
Returns the equation numbers for the specified object.
- Parameters
-
[in] baseId Base ID of the object to get equation numbers for [out] meqn Array of equation numbers [out] ndof Number of degrees of freedom for the object in question
- Date
- 30 Mar 2017

◆ objectstatevar()
| subroutine, public solvermodule::objectstatevar | ( | integer, intent(in) | baseId, |
| real(dp), dimension(*), intent(out) | vars, | ||
| integer, intent(out) | nVar | ||
| ) |
Returns the current state variables for the specified object.
- Parameters
-
[in] baseId Base ID of the object to get equation numbers for [out] vars Array of state variables (positions only for Triads) [out] nVar Number of state variables
- Date
- 20 Mar 2020

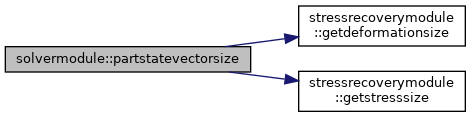
◆ partstatevectorsize()
| subroutine, public solvermodule::partstatevectorsize | ( | integer, intent(in) | iopS, |
| integer, intent(in) | bid, | ||
| integer, intent(out) | ndat | ||
| ) |
Returns the state vector dimension for a FE part.
- Parameters
-
[in] iopS Option telling for which state, 1: deformation, 2: stresses [in] bid Base ID if the FE part to consider [in] ndat Required length of the state array
The deformation state size equals 4 + 3*(number of nodes) whereas the stress state size euals 4 + number of nodes. In both cases the first 4 entries are the step number, time, step size and baseID, respectiviely.
- Date
- 29 Oct 2017

◆ saveinitgagestrains()
| subroutine, public solvermodule::saveinitgagestrains | ( | integer, intent(in) | iopS, |
| real(dp), dimension(*), intent(inout) | data, | ||
| integer, intent(in) | ndat, | ||
| integer, intent(out) | ierr | ||
| ) |
Save/restores the initial gage strain to/from an in-core array.
- Parameters
-
[in] iopS If equal to 1 save to data array, otherwise restore from it data Array with strain gage values [in] ndat Length of the data array [out] ierr Error flag
- Date
- 18 Dec 2017


◆ savepartstate()
| subroutine, public solvermodule::savepartstate | ( | integer, intent(in) | iopS, |
| integer, intent(in) | bid, | ||
| real(dp), dimension(*), intent(out) | data, | ||
| integer, intent(in) | ndat, | ||
| integer, intent(out) | ierr | ||
| ) |
Saves the deformation/stress state of a FE part to an in-core array.
- Parameters
-
[in] iopS Option telling what to save, 1: deformation, 2: stress [in] bid Base ID if the FE part to consider [out] data Deformation/stress state array [in] ndat Length of the data array [out] ierr Error flag
If iopS equals 1, the von Mises stress value at each node of the part is saved, otherwise the 3 deformational displacement components at each node are saved. As the first four values, the current step number, the current time, the time step size, and the base ID of the FE part, respectively, are saved.
- Date
- 31 Oct 2017

◆ savestate()
| subroutine, public solvermodule::savestate | ( | logical, intent(in) | transOnly, |
| real(dp), dimension(*), intent(out) | stateData, | ||
| integer, intent(in) | ndat, | ||
| integer, intent(out) | ierr | ||
| ) |
Saves current state to an in-core array.
- Parameters
-
[in] transOnly If .true., consider position matrices only [out] stateData Array containing all solution dependent variables [in] ndat Length of the stateData array [out] ierr Error flag
- Date
- 16 Jan 2017

◆ setnewtime()
| subroutine, public solvermodule::setnewtime | ( | real(dp), intent(in) | nextTime, |
| integer, intent(out) | ierr | ||
| ) |
Sets the time increment size to be used for next time step.
- Parameters
-
[in] nextTime Physical time to calculate time increment size from [out] ierr Error flag
- Date
- 22 Jun 2022

◆ setrhsvector()
| subroutine, public solvermodule::setrhsvector | ( | real(dp), dimension(sam%neq), intent(in) | Rvec, |
| logical, intent(in) | addTo, | ||
| logical, intent(in) | keepDuringIterations, | ||
| integer, intent(out) | ierr | ||
| ) |
Sets/Updates current right-hand-side vector of linearized system.
- Parameters
-
Rvec The right-hand-side vector [in] addTo If .true., the provided vector is added to the current right-hand-side vector in the model, otherwise it replaces the current one [in] keepDuringIterations If .true., the provided vector should be applied in all iterations of current time step [out] ierr Error flag
- Date
- 30 Mar 2017
◆ softrestart()
| subroutine, public solvermodule::softrestart | ( | real(dp), dimension(*), intent(in) | stateData, |
| integer, intent(in) | ndat, | ||
| integer, intent(in) | writeToRDB, | ||
| integer, intent(out) | ierr | ||
| ) |
Restarts a running simulation model from the provided state.
- Parameters
-
[in] stateData Current state to restart from [in] ndat Length of the stateData array [in] writeToRDB Control variable for frs-file output [out] ierr Error flag
The value of the argument writeToRDB is interpreted as follows:
- < 1 : Suppress all frs-output
- = 1 : Continue with output to same files as the previous run
- = 2 : Create a new set of files for this restart run
- Date
- 6 Feb 2017

◆ solvedynamic()
| logical function, public solvermodule::solvedynamic |
Returns whether the next step should be solved dynamically or not.
- Date
- 10 Jun 2018


◆ solvelineqsystem()
| subroutine, public solvermodule::solvelineqsystem | ( | real(dp), dimension(:), intent(inout) | rhs, |
| integer, intent(in) | nrhs, | ||
| integer, intent(out) | ierr | ||
| ) |
Solves current linear equation system for a set of right-hand-sides.
- Parameters
-
rhs The right-hand-side vectors of the linear equation system [in] nrhs Number of right-hand-side vectors [out] ierr Error flag
Assuming the Newton matrix already have been factorized. To be used by the inverse problem algorithm.
- Date
- 16 Jan 2017

◆ solvemodes()
| subroutine, public solvermodule::solvemodes | ( | integer, intent(in) | nModes, |
| real(dp), dimension(*), intent(out) | eVal, | ||
| real(dp), dimension(*), intent(out) | eVec, | ||
| logical, intent(in) | dofOrder, | ||
| integer, intent(in) | useLaPack, | ||
| integer, intent(out) | ierr | ||
| ) |
Solves the eigenvalue system at current configuration.
- Parameters
-
[in] nModes Number of eigenmodes to solve for [out] eVal Computed eigenvalues (frequencies in [Hz]) [out] eVec Mass-normalized eigenvectors [in] dofOrder If .true., expand eigenvectors to DOF-order [in] useLaPack Flag for using LAPack eigenvalue solvers [out] ierr Error flag
- Date
- 26 Oct 2020

◆ solverampup()
| subroutine, public solvermodule::solverampup | ( | integer, intent(inout) | iop, |
| logical, intent(out) | finished, | ||
| integer, intent(out) | ierr | ||
| ) |
Solves the ramp-up stage, if any.
- Parameters
-
iop Operation flag telling what to do, should be zero [out] finished If .true., the time integration failed [out] ierr Error flag
- Date
- 19 Aug 2022

◆ solverparameters()
| subroutine, public solvermodule::solverparameters | ( | real(dp), intent(out) | dt, |
| real(dp), intent(out) | alpha, | ||
| real(dp), intent(out) | beta, | ||
| real(dp), intent(out) | gamma | ||
| ) |
Returns parameters for the Newmark/HHT-algorithm.
- Parameters
-
[out] dt Time step size [out] alpha Numerical damping parameter of the HHT-scheme [out] beta Newmark time integration parameter [out] gamma Newmark time integration parameter
- Date
- 10 Jun 2018

◆ solvestep()
| subroutine, public solvermodule::solvestep | ( | integer, intent(inout) | iop, |
| logical, intent(in) | finalStep, | ||
| logical, intent(out) | finished, | ||
| integer, intent(out) | ierr | ||
| ) |
Solves for the next time step or iteration.
- Parameters
-
iop Control variable defining what to do (see below) [in] finalStep If .true., this is the final step of current time window [out] finished If .true., the end of the simulation has been reached, or the time integration failed [out] ierr Error flag: - = 0 : All is good
- > 0 : The numerical simulation diverged due to erroneous model
< 0 : Other errors of non-numerical kind (logics, internal, allocation)
This subroutine performs different sub-tasks of the solution process, depending on the value of the control variable iop, as follows:
- = 0 : Normal operation, solve the entire step with iterations
- = -1 : Establish the linear system of the first (prediction) iteration, and then return to the calling module
- = -2 : Same as -1, but also factorize the Newton matrix
- = -3 : Same as 0, but this is the first time step after restart
- = 1 : We are doing quasi-static iterations (internal mode)
- = 2 : We are doing Newmark iterations (internal mode)
- = 3 : Do one quasi-static iteration on the existing linear system
- = 4 : Do one Newmark iteration on the existing linear system
- = 5 : As 3, and then continue until equilibrium
- = 6 : As 4, and then continue until equilibrium
- Date
- 30 Nov 2016

◆ statevectorsize()
| subroutine, public solvermodule::statevectorsize | ( | logical, intent(in) | transOnly, |
| integer, intent(out) | ndat | ||
| ) |
Returns the dimension of the state vector.
- Parameters
-
[in] transOnly If .true., consider position matrices only [out] ndat Required length of the state array
- Date
- 16 Jan 2017


◆ straingagessize()
| subroutine, public solvermodule::straingagessize | ( | integer, intent(out) | ndat | ) |
Returns the dimension of the strain gages vector.
- Parameters
-
[out] ndat Required length of the strain gage state array
- Date
- 18 Dec 2017


◆ systemsize()
| subroutine, public solvermodule::systemsize | ( | integer, intent(out) | ndim, |
| logical, intent(in), optional | expanded | ||
| ) |
Returns the dimension of the linearized system.
- Parameters
-
[out] ndim Number of unknowns in the linear equation system [in] expanded If .true., return total number of DOFs in the system
- Date
- 30 Mar 2017
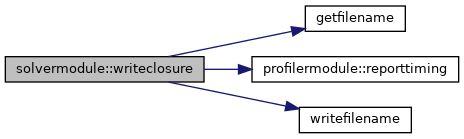
◆ writeclosure()
| subroutine solvermodule::writeclosure | ( | integer, intent(in) | lcon, |
| integer, intent(inout) | ierr | ||
| ) |
Outputs file and profiling information on program termination.
- Parameters
-
[in] lcon File unit number for console messages ierr Error flag
- Date
- 30 Nov 2016
Variable Documentation
◆ amat
|
private |
System matrix for external communication.
◆ chmodel
|
private |
Model file name.
◆ chnames
|
private |
Result database file names.
◆ ctrl
|
private |
Control system data.
◆ extrhs
|
private |
Externally set load vector.
Assumed constant during Newton iterations.
◆ frsnames
|
private |
Recovery result files.
◆ mech
| type(mechanismtype), save, public solvermodule::mech |
Mechanism objects of the model.
◆ modes
|
private |
Data for eigenmodes.
◆ sam
| type(samtype), save, public solvermodule::sam |
Data for managing system matrix assembly.
◆ sys
| type(systemtype), save, public solvermodule::sys |
System level model data.
◆ yamlfile
|
private |
Mode shape file name.