Module with subroutines for quasi-static time-domain simulation. More...
Functions/Subroutines | |
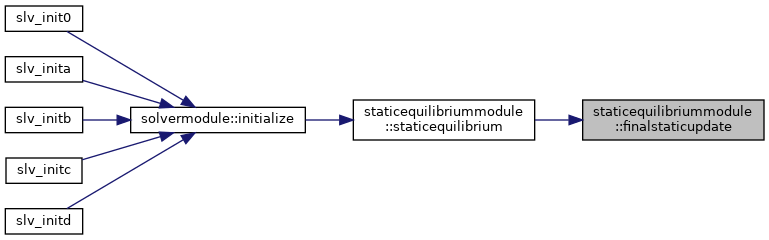
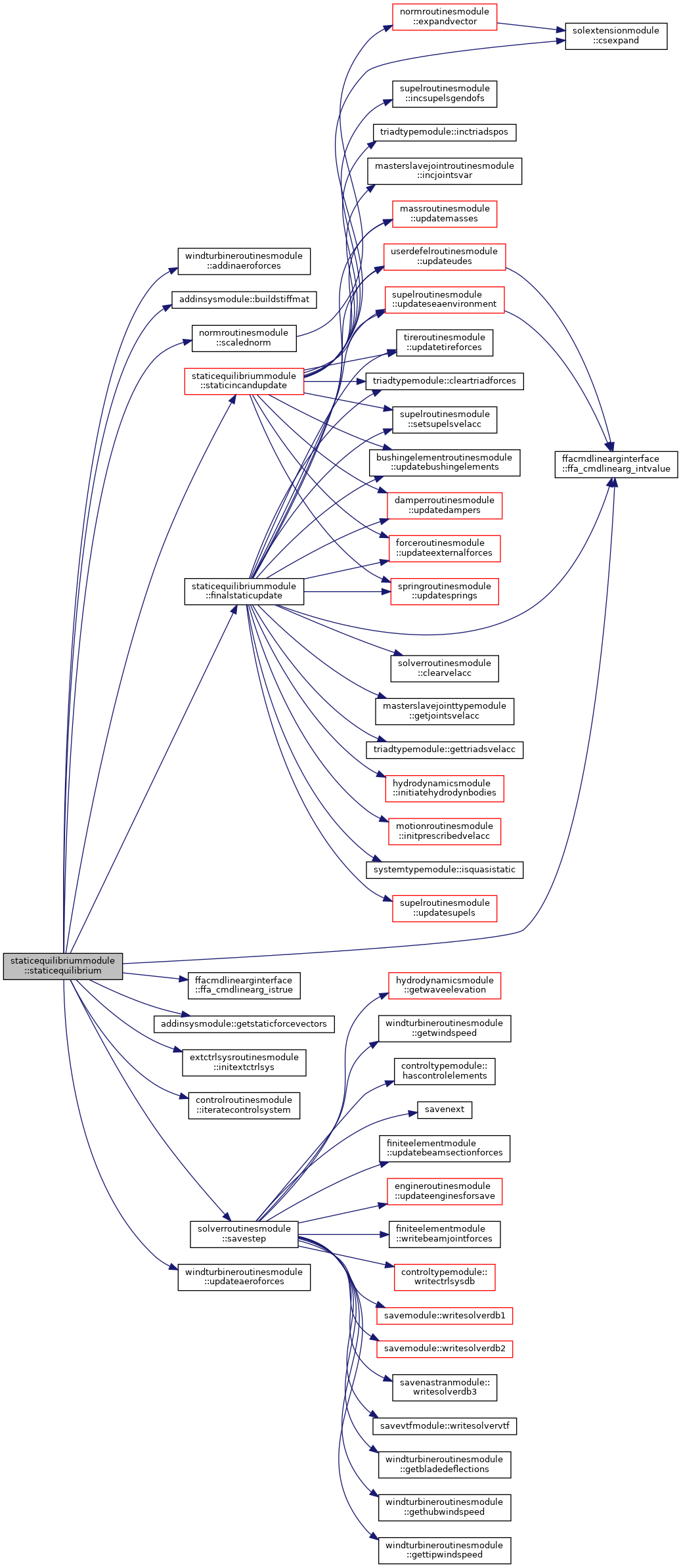
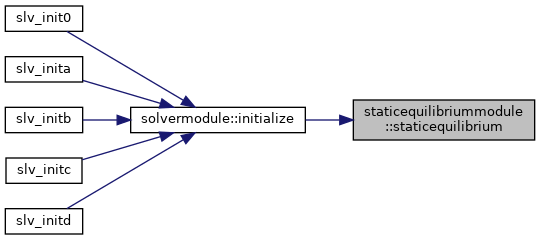
| subroutine, public | staticequilibrium (sam, sys, mech, ctrl, xinp, num_xinp, lpu, ierr) |
| Performs static equilibrium iterations to find start configuration. More... | |
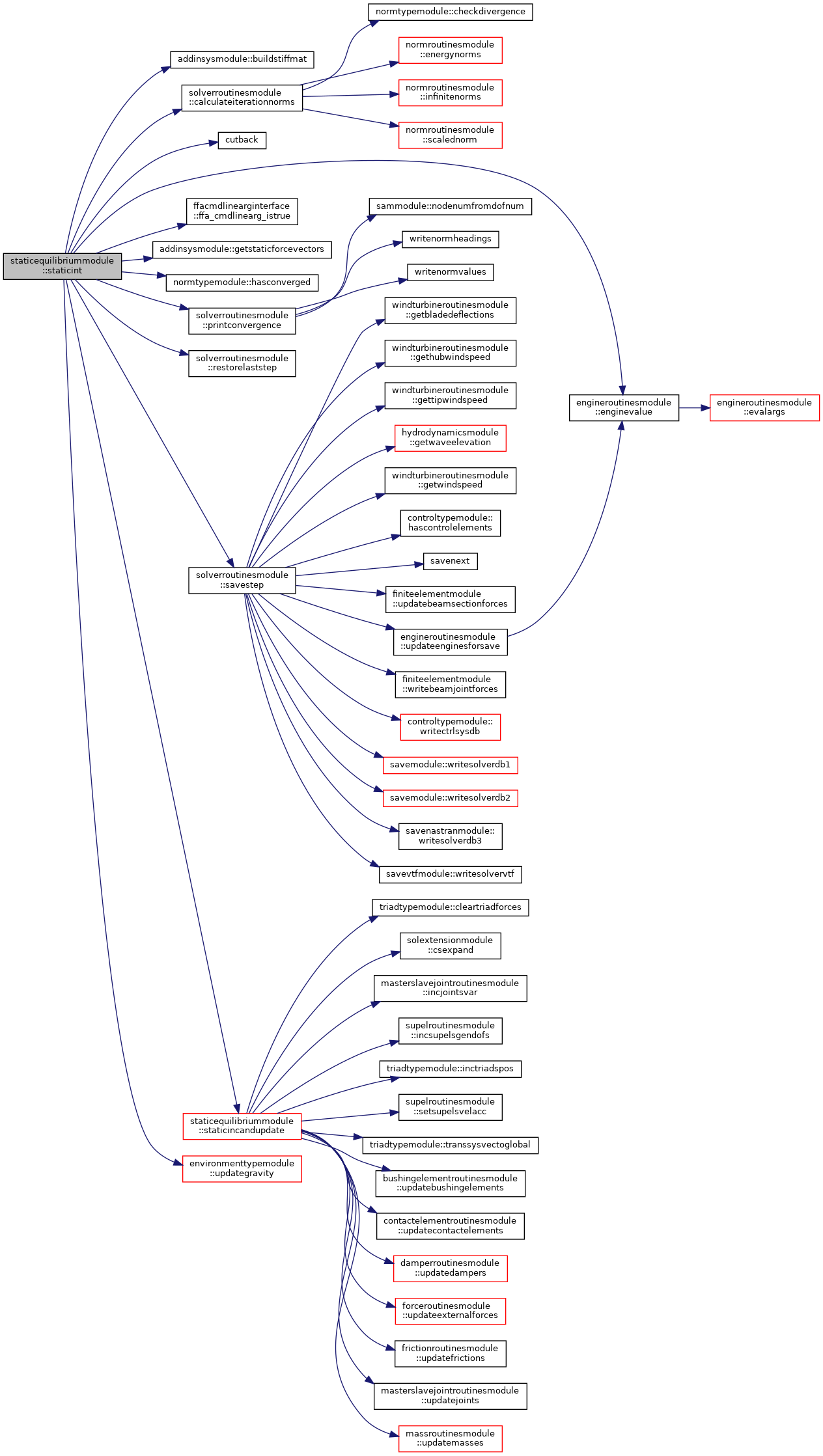
| subroutine, public | staticint (sam, sys, mech, ctrl, extRhs, iop, resFileFormat, lpu, ierr) |
| Advances the quasi-static solution one time step. More... | |
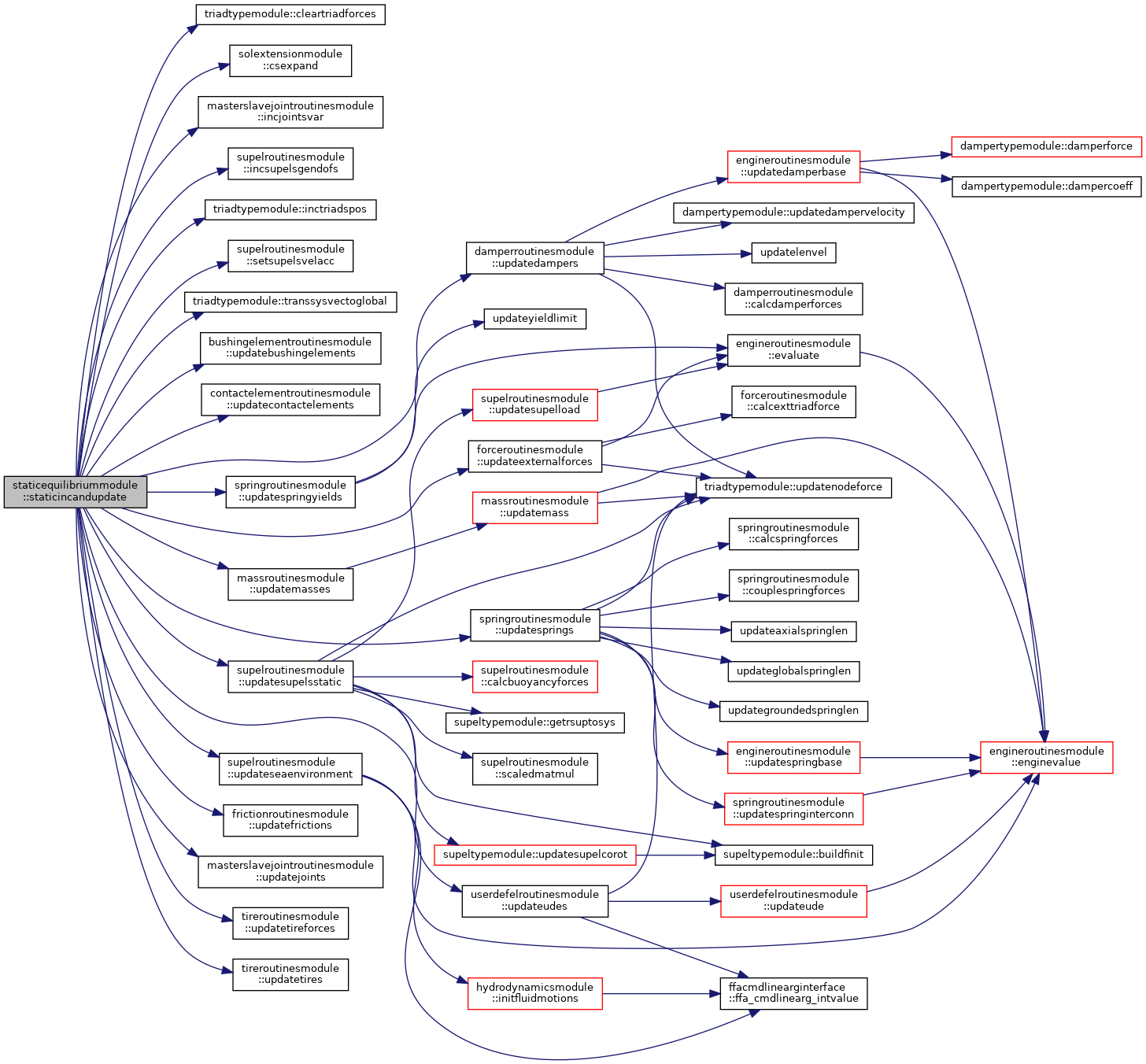
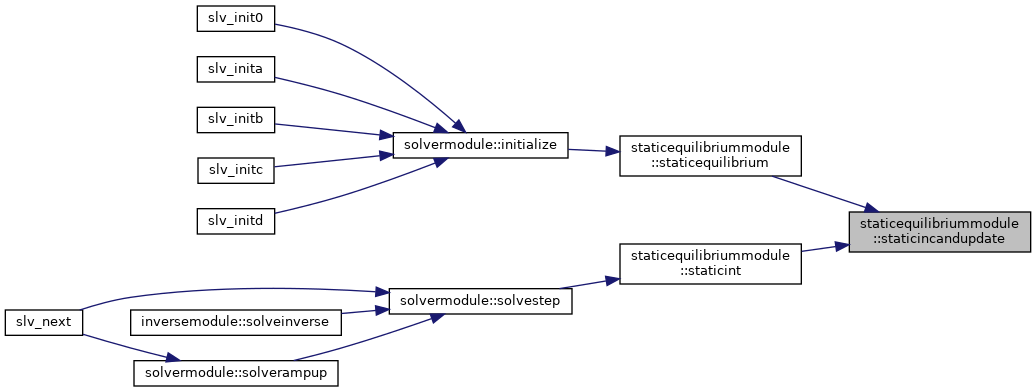
| subroutine | staticincandupdate (sam, sys, mech, ierr, delta, noCorotUpd, doIterations, doFrictions) |
| Increments all position variables and updates the configuration. More... | |
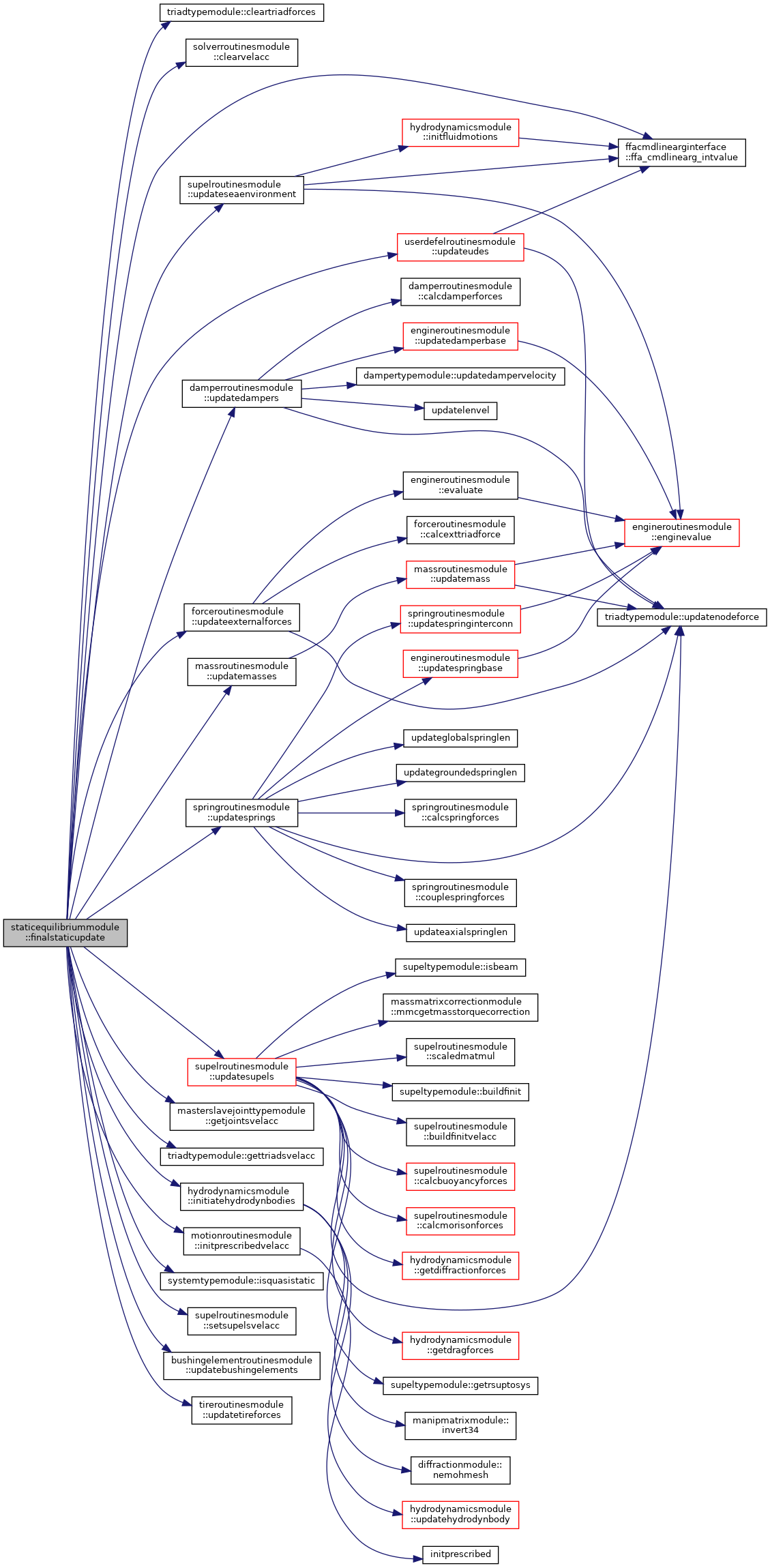
| subroutine | finalstaticupdate (sam, sys, mech, ierr) |
| Updates the configuration after initial static equilibrium. More... | |
Detailed Description
Module with subroutines for quasi-static time-domain simulation.
Function/Subroutine Documentation
◆ finalstaticupdate()
| subroutine staticequilibriummodule::finalstaticupdate | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| integer, intent(out) | ierr | ||
| ) |
Updates the configuration after initial static equilibrium.
- Parameters
-
[in] sam Data for managing system matrix assembly sys System level model data mech Mechanism components of the model [out] ierr Error flag
This subroutine performs some final updates after the initial static equilibrium iterations have converged. Typically, this is (initial) velocity-dependent stuff, like dampers, etc. There is no need to update those during the iterations themselves which are purely static, only on the converged configuration.
- Note
- If the subsequent time history simulation is quasi-static, any non-zero initial conditions are nullified such that all velocity-dependent quantities will be initialized to zero instead.
- Date
- 2 Jun 2004
◆ staticequilibrium()
| subroutine, public staticequilibriummodule::staticequilibrium | ( | type(samtype), intent(inout) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| type(controltype), intent(inout) | ctrl, | ||
| real(dp), dimension(*), intent(in), optional | xinp, | ||
| integer, intent(inout), optional | num_xinp, | ||
| integer, intent(in) | lpu, | ||
| integer, intent(out) | ierr | ||
| ) |
Performs static equilibrium iterations to find start configuration.
- Parameters
-
sam Data for managing system matrix assembly sys System level model data mech Mechanism components of the model ctrl Control system data [in] xinp External function values for initial state num_xinp Number of external function values to extract/extracted [in] lpu File unit number for res-file output [out] ierr Error flag
This is a rewritten version of the old QUAEQL subroutine by OIS and others from 1989. It solves for the initial configuration where all external loads (including gravity) is evaluated at the starting time, through Newton-Raphson iterations. The purpose is to avoid initial noise in the subsequent dynamic simulation due to large initial transients.
- Date
- 30 May 2002
◆ staticincandupdate()
|
private |
Increments all position variables and updates the configuration.
- Parameters
-
[in] sam Data for managing system matrix assembly sys System level model data mech Mechanism components of the model [out] ierr Error flag [in] delta Iterative solution increment [in] noCorotUpd If .true., the co-rotated frames are not updated [in] doIterations If .false., no initial equilibrium iterations (used by the tire module only) [in] doFrictions If not present, skip friction update. If .false., use pseudo-velocities during friction update.
All mechanism objects are brought up-to-date with the updated configuration while the velocity and acceleration variables are assumed identically zero.
- Date
- 30 May 2002
◆ staticint()
| subroutine, public staticequilibriummodule::staticint | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| type(controltype), intent(inout) | ctrl, | ||
| real(dp), dimension(:), intent(in), optional | extRhs, | ||
| integer, intent(inout) | iop, | ||
| integer, intent(inout) | resFileFormat, | ||
| integer, intent(in) | lpu, | ||
| integer, intent(out) | ierr | ||
| ) |
Advances the quasi-static solution one time step.
- Parameters
-
sam Data for managing system matrix assembly sys System level model data mech Mechanism components of the model ctrl Control system data [in] extRhs Additional external forces set by some external process iop Control variable defining what to do (see below) resfileFormat Flag for res-file output of convergence history [in] lpu File unit number for res-file output [out] ierr Error flag
This subroutine performs different sub-tasks of the solution process, depending on the value of the control variable iop, as follows:
- = 0 : Normal operation, solve the entire step with Newton-iterations
- = -1 : Establish the linearized system of the first iteration, and then return to the calling module
- = -2 : Same as -1, but also factorize the stiffness matrix
- = 1 : We are doing quasi-static iterations (internal mode)
- = 3 : Do one quasi-static iteration on the existing linear system
- = 5 : As 3, and then continue until equilibrium
- = 15 : As 5, but include triangularization of existing equation system
- Date
- 30 May 2002