Module with subroutines/functions for automatic time stepping. More...
Functions/Subroutines | |
| subroutine, public | pushaccelstack (sam, acc, ierr) |
| Pushes the given vector onto the acceleration stack. More... | |
| subroutine | getautostep (sam, sys, errlim, HP, H, HX, istat) |
| Calculates the next time step based on local truncation errors. More... | |
| real(dp) function, public | getinitialtimestepsize (sys, ierr) |
| Returns the length of the initial time step. More... | |
| real(dp) function, public | gettimestepsize (sys, sam, ctrl, errlim, ierr) |
| Returns the length of the next time step. More... | |
| subroutine, public | deallocatetimestep () |
| Deallocates the internal buffers for automatic time stepping. More... | |
Variables | |
| real(dp), dimension(:), pointer, save | a1 |
| Bottom of acceleration stack. More... | |
| real(dp), dimension(:), pointer, save | a2 |
| Middle of acceleration stack. More... | |
| real(dp), dimension(:), pointer, save | a3 |
| Top of acceleration stack. More... | |
| real(dp), dimension(:), allocatable, save | err |
| Internal work array. More... | |
Detailed Description
Module with subroutines/functions for automatic time stepping.
The auto-time stepping is based in local trunction errors calculated from the last three acceleration states. This is not much in use any longer and is only kept for historical reasons. The module also handles prescribed time step size defined by a general function (time step engine).
Function/Subroutine Documentation
◆ deallocatetimestep()
| subroutine, public timestepmodule::deallocatetimestep |
Deallocates the internal buffers for automatic time stepping.
- Date
- 23 Jan 2017
◆ getautostep()
| subroutine timestepmodule::getautostep | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(in) | sys, | ||
| real(dp), intent(in) | errlim, | ||
| real(dp), intent(in) | HP, | ||
| real(dp), intent(in) | H, | ||
| real(dp), intent(out) | HX, | ||
| integer, intent(out) | istat | ||
| ) |
Calculates the next time step based on local truncation errors.
- Parameters
-
[in] sam Data for managing system matrix assembly [in] sys System level model data [in] errlim Truncation error limit [in] HP Previous time step size [in] H Current time step size [out] HX Next time step size [out] istat Status flag: - = 0 : The time step in unchanged
- > 0 : The time step is increased or decreased
- < 0 : Error
- Date
- 17 Jul 2000


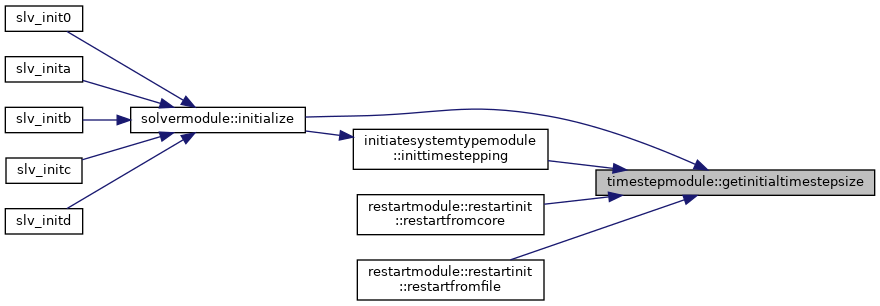
◆ getinitialtimestepsize()
| real(dp) function, public timestepmodule::getinitialtimestepsize | ( | type(systemtype), intent(inout) | sys, |
| integer, intent(out) | ierr | ||
| ) |
Returns the length of the initial time step.
- Parameters
-
sys System level model data [out] ierr Error flag
- Date
- 21 Aug 2007

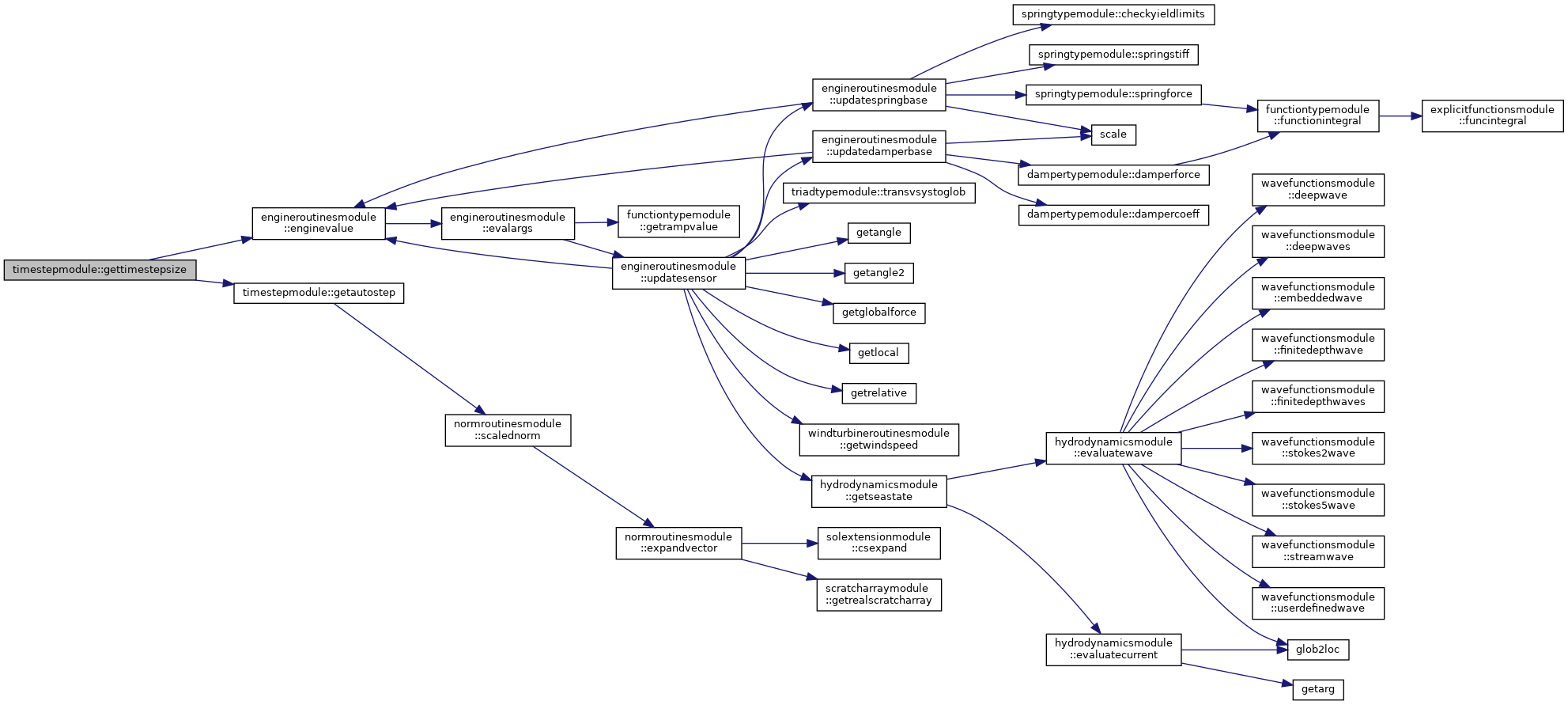
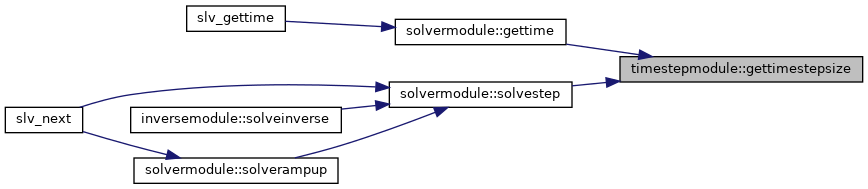
◆ gettimestepsize()
| real(dp) function, public timestepmodule::gettimestepsize | ( | type(systemtype), intent(inout) | sys, |
| type(samtype), intent(in) | sam, | ||
| type(controltype), intent(in) | ctrl, | ||
| real(dp), intent(in) | errlim, | ||
| integer, intent(inout) | ierr | ||
| ) |
Returns the length of the next time step.
- Parameters
-
sys System level model data [in] sam Data for managing system matrix assembly [in] ctrl Control system data [in] errlim Truncation error limit ierr Error flag
- Date
- 26 Feb 2002
◆ pushaccelstack()
| subroutine, public timestepmodule::pushaccelstack | ( | type(samtype), intent(in) | sam, |
| real(dp), dimension(:), intent(in) | acc, | ||
| integer, intent(out) | ierr | ||
| ) |
Pushes the given vector onto the acceleration stack.
- Parameters
-
[in] sam Data for managing system matrix assembly [in] acc Acceleration vector to be pushed [out] ierr Error flag
- Date
- 17 Jul 2000

Variable Documentation
◆ a1
|
private |
Bottom of acceleration stack.
◆ a2
|
private |
Middle of acceleration stack.
◆ a3
|
private |
Top of acceleration stack.
◆ err
|
private |
Internal work array.