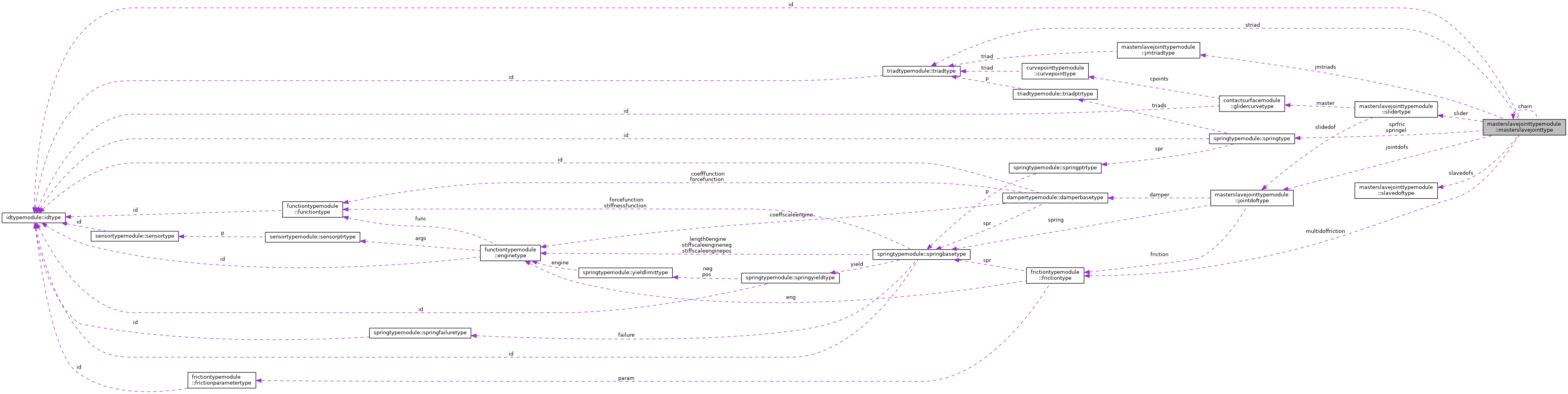
Data type representing a master-slave-based joint. More...
Public Attributes | |
| type(idtype) | id |
| General identification data. More... | |
| integer | type |
| The joint type. More... | |
| integer | version |
| Joint type version. More... | |
| integer | rotparam |
| Rotational parametrization type. More... | |
| integer | samnodnum |
| Node number for SAM reference (madof) More... | |
| integer | njointdofs |
| Number of degrees of freedom in the joint. More... | |
| real(dp), dimension(3, 4) | jposing |
| Position of joint relative to the global system. More... | |
| integer, dimension(:), pointer | bc |
| Boundary condition codes for the joint DOFs. More... | |
| type(triadtype), pointer | striad |
| The slave triad of the joint. More... | |
| real(dp), dimension(3, 4) | stpos0inj |
| Slave triad position in joint system when all joint variables are zero. More... | |
| type(jmtriadtype), dimension(:), pointer | jmtriads |
| Master triads of the joint. More... | |
| type(slavedoftype), dimension(:), pointer | slavedofs |
| Slave DOFs of the joint. More... | |
| type(jointdoftype), dimension(:), pointer | jointdofs |
| The joint DOFs. More... | |
| type(slidertype), pointer | slider |
| Data for multi-master joints only. More... | |
| type(masterslavejointtype), pointer | chain |
| If one of the master triads also is a slave, this points to the other joint where that triad is slave. More... | |
| type(springtype), pointer | springel |
| For interconnected springs. More... | |
| type(springtype), pointer | sprfric |
| Friction spring element. More... | |
| type(frictiontype), pointer | multidoffriction |
| For ball joints, etc. More... | |
| integer | nmats |
| Number of intermediate matrices. More... | |
| real(dp), dimension(:,:,:), pointer | posfromjvars |
| Intermediate position matrices depending on the joint variables. More... | |
| real(dp), dimension(:,:), pointer | thetavec |
| Rotation vectors associated with each intermediate position matrix. More... | |
| integer, dimension(:), pointer | numrot |
| Number of rotations associated with each intermediate position matrix. More... | |
| integer, dimension(:), pointer | dofoutputorder |
| DOF-order on the frs-file. More... | |
Detailed Description
Data type representing a master-slave-based joint.
Member Data Documentation
◆ bc
| integer, dimension(:), pointer masterslavejointtypemodule::masterslavejointtype::bc |
Boundary condition codes for the joint DOFs.
0 is fixed, 1 is free and 2 is fixed during the initial static equilibrium iterations and eigenvalue calculations, and free otherwise
◆ chain
| type(masterslavejointtype), pointer masterslavejointtypemodule::masterslavejointtype::chain |
If one of the master triads also is a slave, this points to the other joint where that triad is slave.
◆ dofoutputorder
| integer, dimension(:), pointer masterslavejointtypemodule::masterslavejointtype::dofoutputorder |
DOF-order on the frs-file.
◆ id
◆ jmtriads
| type(jmtriadtype), dimension(:), pointer masterslavejointtypemodule::masterslavejointtype::jmtriads |
Master triads of the joint.
◆ jointdofs
| type(jointdoftype), dimension(:), pointer masterslavejointtypemodule::masterslavejointtype::jointdofs |
The joint DOFs.
◆ jposing
| real(dp), dimension(3,4) masterslavejointtypemodule::masterslavejointtype::jposing |
Position of joint relative to the global system.
◆ multidoffriction
| type(frictiontype), pointer masterslavejointtypemodule::masterslavejointtype::multidoffriction |
For ball joints, etc.
◆ njointdofs
| integer masterslavejointtypemodule::masterslavejointtype::njointdofs |
Number of degrees of freedom in the joint.
◆ nmats
| integer masterslavejointtypemodule::masterslavejointtype::nmats |
Number of intermediate matrices.
◆ numrot
| integer, dimension(:), pointer masterslavejointtypemodule::masterslavejointtype::numrot |
Number of rotations associated with each intermediate position matrix.
◆ posfromjvars
| real(dp), dimension(:,:,:), pointer masterslavejointtypemodule::masterslavejointtype::posfromjvars |
Intermediate position matrices depending on the joint variables.
◆ rotparam
| integer masterslavejointtypemodule::masterslavejointtype::rotparam |
Rotational parametrization type.
◆ samnodnum
| integer masterslavejointtypemodule::masterslavejointtype::samnodnum |
Node number for SAM reference (madof)
◆ slavedofs
| type(slavedoftype), dimension(:), pointer masterslavejointtypemodule::masterslavejointtype::slavedofs |
Slave DOFs of the joint.
◆ slider
| type(slidertype), pointer masterslavejointtypemodule::masterslavejointtype::slider |
Data for multi-master joints only.
◆ sprfric
| type(springtype), pointer masterslavejointtypemodule::masterslavejointtype::sprfric |
Friction spring element.
◆ springel
| type(springtype), pointer masterslavejointtypemodule::masterslavejointtype::springel |
For interconnected springs.
◆ stpos0inj
| real(dp), dimension(3,4) masterslavejointtypemodule::masterslavejointtype::stpos0inj |
Slave triad position in joint system when all joint variables are zero.
◆ striad
The slave triad of the joint.
◆ thetavec
| real(dp), dimension(:,:), pointer masterslavejointtypemodule::masterslavejointtype::thetavec |
Rotation vectors associated with each intermediate position matrix.
◆ type
| integer masterslavejointtypemodule::masterslavejointtype::type |
The joint type.
◆ version
| integer masterslavejointtypemodule::masterslavejointtype::version |
Joint type version.
The documentation for this type was generated from the following file:
- src/vpmSolver/masterSlaveJointTypeModule.f90