Module with subroutines for structural energy integration. More...
Functions/Subroutines | |
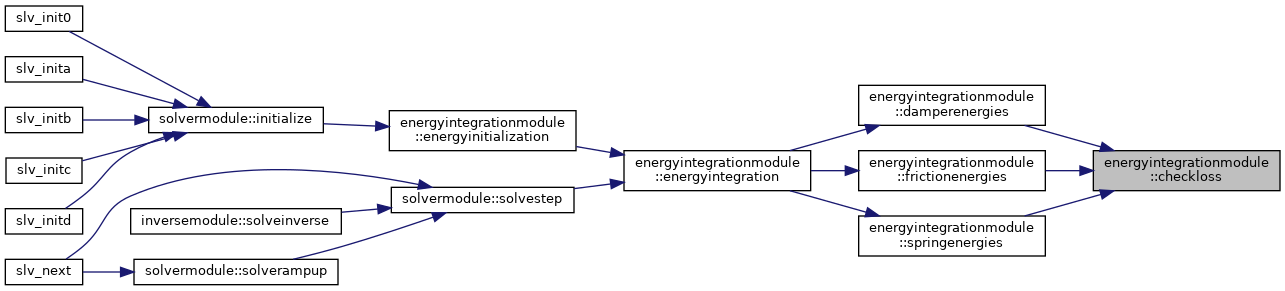
| subroutine | checkloss (objType, objId, time, Eloss, F, du) |
| Prints out a warning if negative energy loss is detected. More... | |
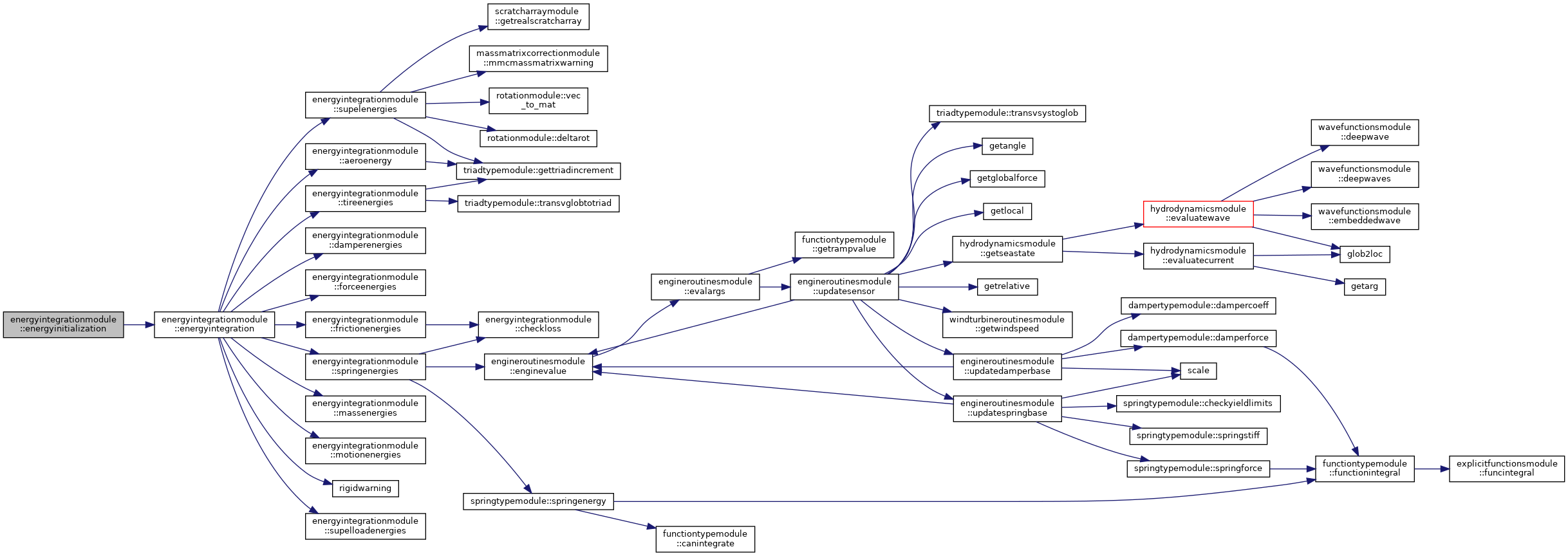
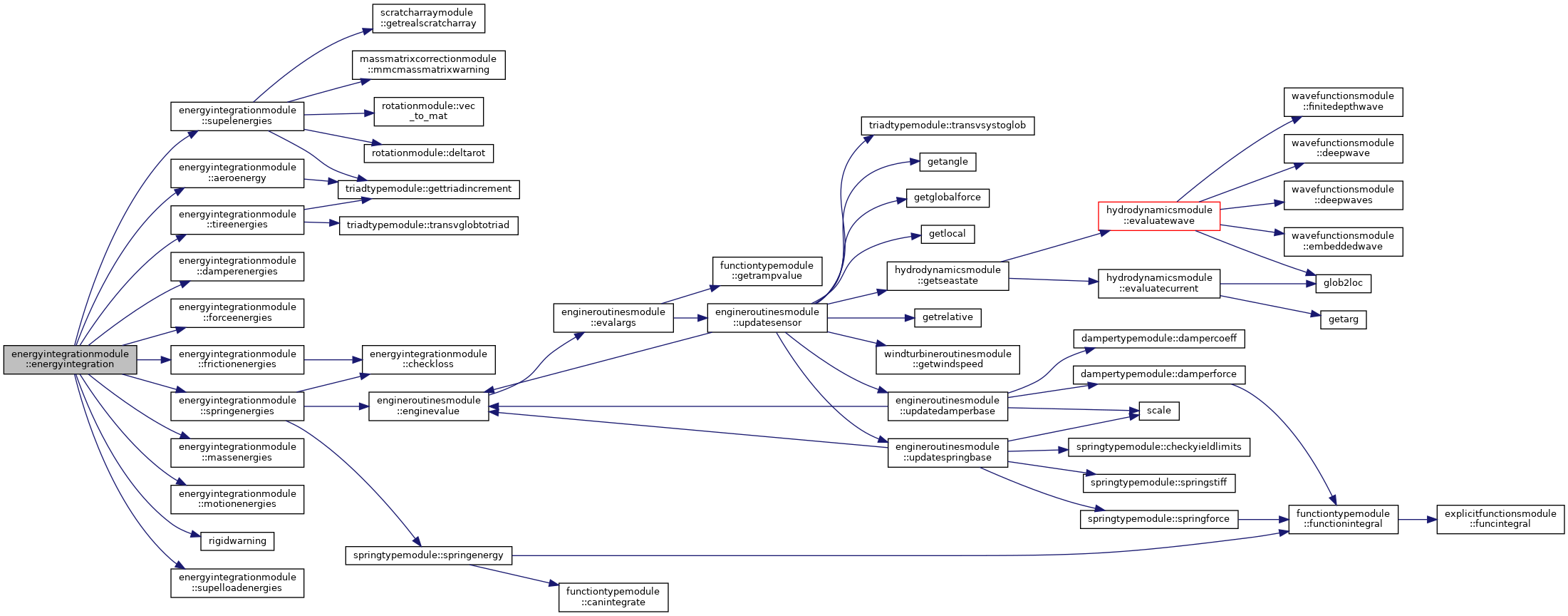
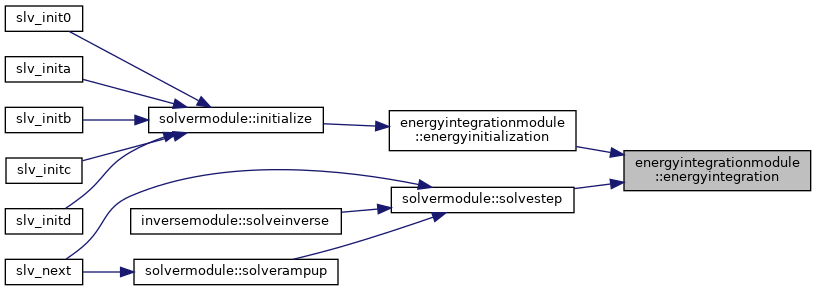
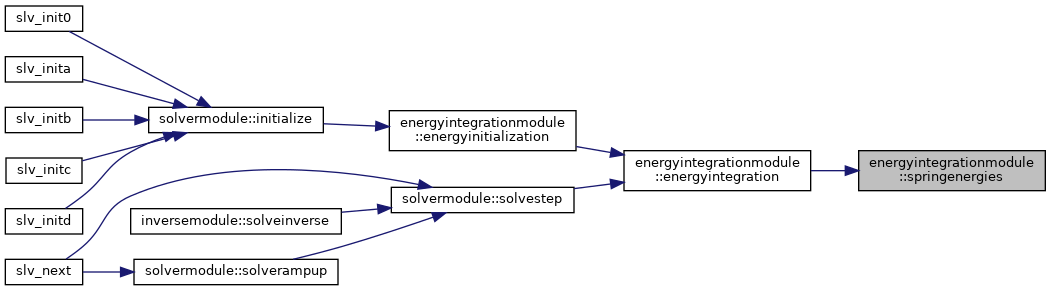
| subroutine, public | energyintegration (mech, time, dTime, linearStatic, doStiffDampE, ierr) |
| Integrates the system energies for current time step. More... | |
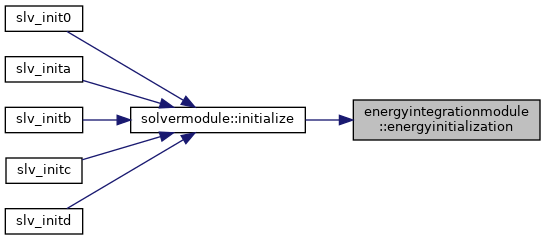
| subroutine, public | energyinitialization (mech, time, ierr) |
| Initializes the energy integration variables. More... | |
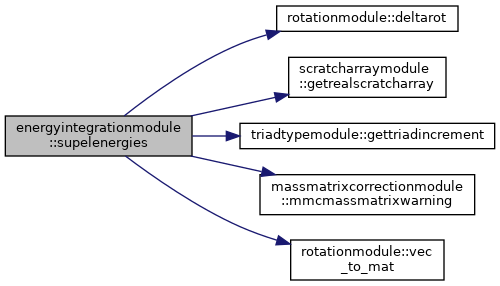
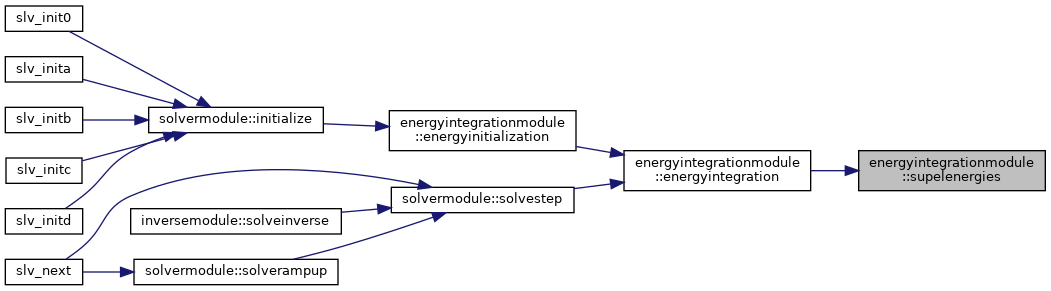
| subroutine | supelenergies (supel, gravVec, seaLevel, dTime, doStiffDampE, Epot, Ekin, Estr, Edmp, ierr) |
| Calculates the system energy contributions from a superelement. More... | |
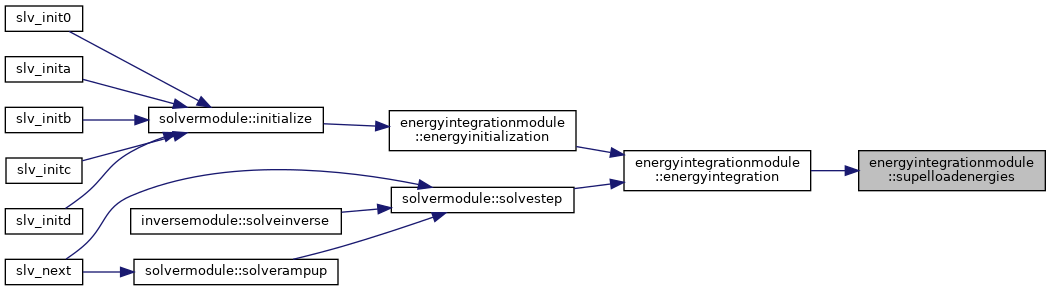
| subroutine | supelloadenergies (supLoad, linearStatic, dTime, Einp) |
| Calculates the incremental work done by a superelement load. More... | |
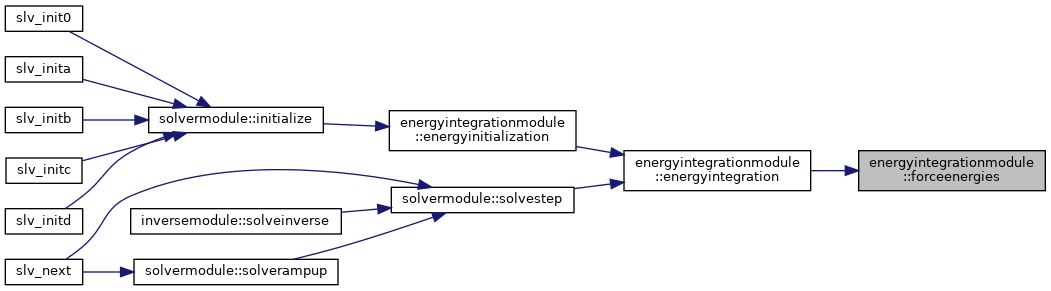
| subroutine | forceenergies (force, linearStatic, dTime, Einp) |
| Calculates the incremental work done by an external force. More... | |
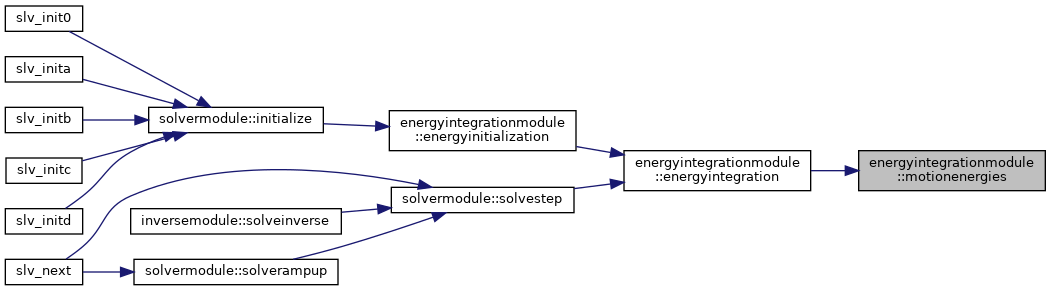
| subroutine | motionenergies (motion, linearStatic, dTime, Einp) |
| Calculates the incremental work done by a prescribed motion. More... | |
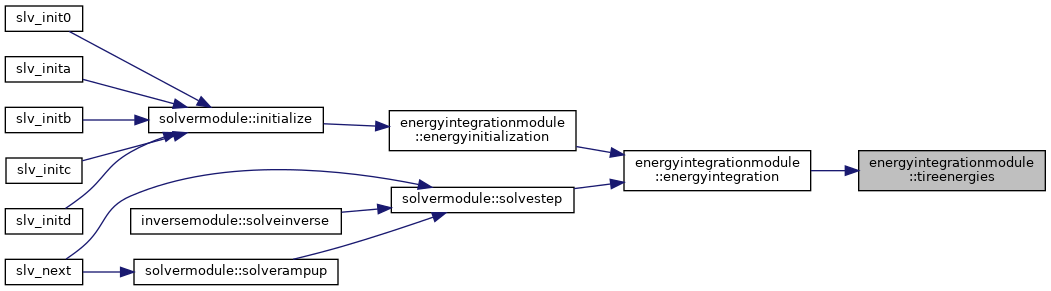
| subroutine | tireenergies (tire, gravVec, dTime, Epot, Ekin, Einp) |
| Calculates energy contributions from a tire. More... | |
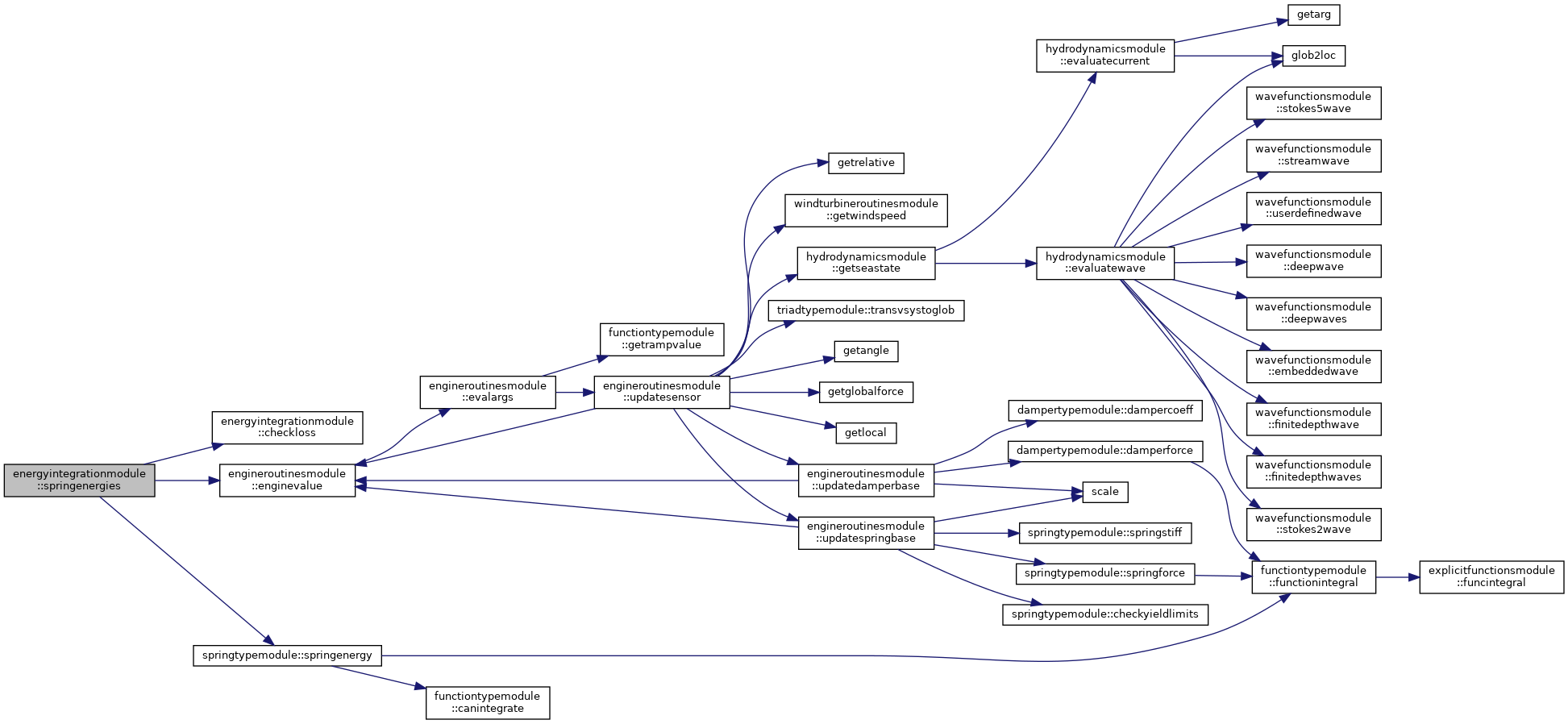
| subroutine | springenergies (spr, linearStatic, time, dTime, Estr, Einp, Edmp, ierr) |
| Computes strain energy, input energy and energy loss for a spring. More... | |
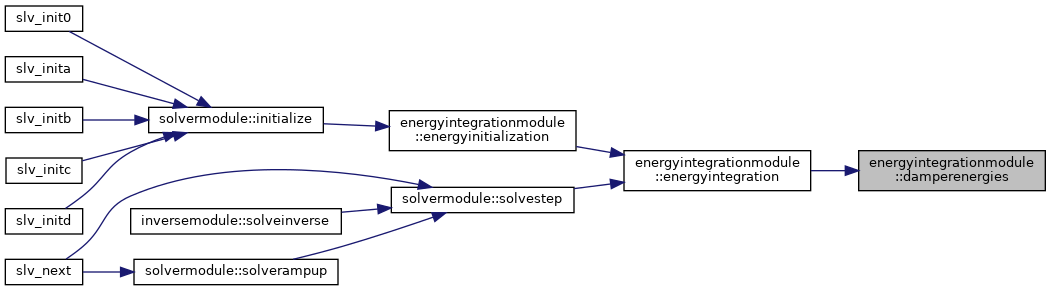
| subroutine | damperenergies (dmp, time, dTime, Edmp) |
| Calculates the incremental work done by a discrete damper. More... | |
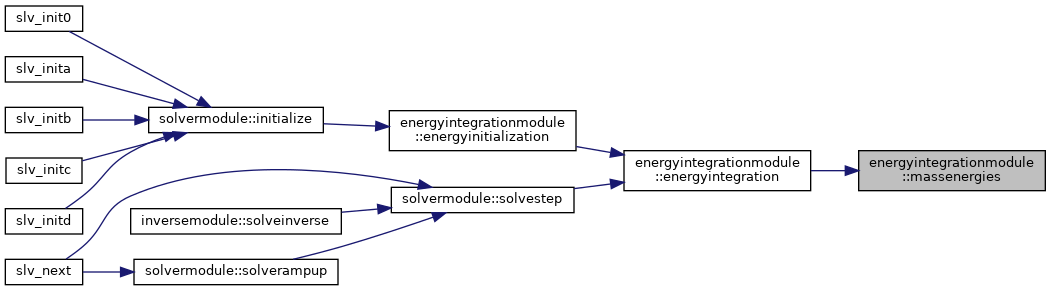
| subroutine | massenergies (mass, gravVec, dTime, Epot, Ekin) |
| Calculates the kinetic and potential energy from a lumped mass. More... | |
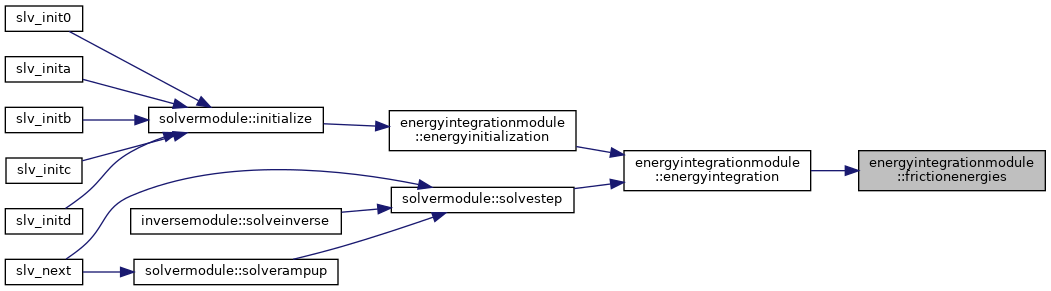
| subroutine | frictionenergies (friction, time, dTime, Edmp) |
| Calculate the incremental work done by a joint friction. More... | |
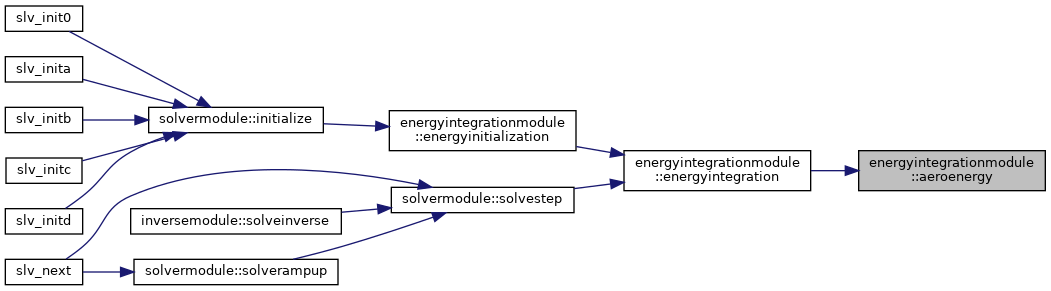
| subroutine | aeroenergy (aNode, Einp) |
| Calculates the incremental work done by the aerodynamic force on a wind turbine blade node. More... | |
Detailed Description
Module with subroutines for structural energy integration.
This module contains a set of subroutines for calculating the structural energy contribution for each object of the meachanism.
- Date
- 1 Oct 1997
Function/Subroutine Documentation
◆ aeroenergy()
| subroutine energyintegrationmodule::aeroenergy | ( | type(bladenode), intent(inout) | aNode, |
| real(dp), intent(inout) | Einp | ||
| ) |
Calculates the incremental work done by the aerodynamic force on a wind turbine blade node.
- Parameters
-
aNode Blade node to calculate energies for Einp Accumulated input energy from external forces and motions
- Date
- 22 Jan 2010

◆ checkloss()
|
private |
Prints out a warning if negative energy loss is detected.
- Parameters
-
[in] objType Type name of the object to print message for [in] objId Id of the object to print message for [in] time Current simulation time [in] Eloss Energy loss value [in] F Force value causing the energy loss [in] du Displacement increment causing the energy loss
- Date
- 11 Jul 2014
◆ damperenergies()
| subroutine energyintegrationmodule::damperenergies | ( | type(damperbasetype), intent(inout) | dmp, |
| real(dp), intent(in) | time, | ||
| real(dp), intent(in) | dTime, | ||
| real(dp), intent(inout) | Edmp | ||
| ) |
Calculates the incremental work done by a discrete damper.
- Parameters
-
dmp Damper to calculate energies for [in] time Current simulation time [in] dTime Time increment size Edmp Energy loss due to damping for the mechanism
- Date
- 7 Dec 1999
◆ energyinitialization()
| subroutine, public energyintegrationmodule::energyinitialization | ( | type(mechanismtype), intent(inout) | mech, |
| real(dp), intent(in) | time, | ||
| integer, intent(out) | ierr | ||
| ) |
Initializes the energy integration variables.
- Parameters
-
mech Mechanism components of the model [in] time Current simulation time [out] ierr Error flag
- Date
- 2 Jun 2004
◆ energyintegration()
| subroutine, public energyintegrationmodule::energyintegration | ( | type(mechanismtype), intent(inout) | mech, |
| real(dp), intent(in) | time, | ||
| real(dp), intent(in) | dTime, | ||
| logical, intent(in) | linearStatic, | ||
| logical, intent(in) | doStiffDampE, | ||
| integer, intent(out) | ierr | ||
| ) |
Integrates the system energies for current time step.
- Parameters
-
mech Mechanism components of the model [in] time Current simulation time [in] dTime Time increment size [in] linearStatic If .true., we are doing a linear static analysis [in] doStiffDampE If .true., use mean deformational displacement velocity when calculating energy loss due to stiffness proportional damping [out] ierr Error flag
If dTime is zero, only the potential, kinetical and strain energies are computed. The remaining quantities are then identically zero.
- Date
- 2 Jun 2004
◆ forceenergies()
| subroutine energyintegrationmodule::forceenergies | ( | type(forcetype), intent(inout) | force, |
| logical, intent(in) | linearStatic, | ||
| real(dp), intent(in) | dTime, | ||
| real(dp), intent(inout) | Einp | ||
| ) |
Calculates the incremental work done by an external force.
- Parameters
-
force External force to calculate energy for [in] linearStatic If .true., we are doing a linear static analysis [in] dTime Time increment size Einp Accumulated energy done by external forces
- Date
- 14 Oct 1997
◆ frictionenergies()
| subroutine energyintegrationmodule::frictionenergies | ( | type(frictiontype), intent(inout) | friction, |
| real(dp), intent(in) | time, | ||
| real(dp), intent(in) | dTime, | ||
| real(dp), intent(inout) | Edmp | ||
| ) |
Calculate the incremental work done by a joint friction.
- Parameters
-
friction Friction to calculate energies for [in] time Current simulation time [in] dTime Time increment size Edmp Energy loss due to damping for the mechanism
- Date
- 1 Apr 1998
- Date
- 7 Dec 1999

◆ massenergies()
| subroutine energyintegrationmodule::massenergies | ( | type(masstype), intent(inout) | mass, |
| real(dp), dimension(3), intent(in) | gravVec, | ||
| real(dp), intent(in) | dTime, | ||
| real(dp), intent(inout) | Epot, | ||
| real(dp), intent(inout) | Ekin | ||
| ) |
Calculates the kinetic and potential energy from a lumped mass.
- Parameters
-
mass Point mass to calculate energies for [in] gravVec Gravitation vector [in] dTime Time increment size Epot Accumulated potential energy for the mechanism Ekin Accumulated kinetic energy for the mechanism
- Date
- 14 Oct 1997
◆ motionenergies()
| subroutine energyintegrationmodule::motionenergies | ( | type(motiontype), intent(inout) | motion, |
| logical, intent(in) | linearStatic, | ||
| real(dp), intent(in) | dTime, | ||
| real(dp), intent(inout) | Einp | ||
| ) |
Calculates the incremental work done by a prescribed motion.
- Parameters
-
motion Prescribed motion to calculate energy for [in] linearStatic If .true., we are doing a linear static analysis [in] dTime Time increment size Einp Accumulated energy done by external forces and motions
- Date
- 4 Oct 2005
◆ springenergies()
| subroutine energyintegrationmodule::springenergies | ( | type(springbasetype), intent(inout) | spr, |
| logical, intent(in) | linearStatic, | ||
| real(dp), intent(in) | time, | ||
| real(dp), intent(in) | dTime, | ||
| real(dp), intent(inout) | Estr, | ||
| real(dp), intent(inout) | Einp, | ||
| real(dp), intent(inout) | Edmp, | ||
| integer, intent(inout) | ierr | ||
| ) |
Computes strain energy, input energy and energy loss for a spring.
- Parameters
-
spr Spring to calculate energies for [in] linearStatic If .true., we are doing a linear static analysis [in] time Current simulation time [in] dTime Time increment size Estr Accumulated elastic strain energy for the mechanism Einp Accumulated input energy from external forces and motions Edmp Energy loss due to damping for the mechanism ierr Error flag
- Date
- 1 Oct 1997
◆ supelenergies()
| subroutine energyintegrationmodule::supelenergies | ( | type(supeltype), intent(inout) | supel, |
| real(dp), dimension(3), intent(in) | gravVec, | ||
| real(dp), intent(in) | seaLevel, | ||
| real(dp), intent(in) | dTime, | ||
| logical, intent(in) | doStiffDampE, | ||
| real(dp), intent(inout) | Epot, | ||
| real(dp), intent(inout) | Ekin, | ||
| real(dp), intent(inout) | Estr, | ||
| real(dp), intent(inout) | Edmp, | ||
| integer, intent(inout) | ierr | ||
| ) |
Calculates the system energy contributions from a superelement.
- Parameters
-
supel Superelement to calculate energies for [in] gravVec Gravitation vector [in] seaLevel Current sea level [in] dTime Time increment size [in] doStiffDampE If .true., use mean deformational displacement velocity when calculating energy loss due to stiffness proportional damping Epot Accumulated potential energy for the mechanism Ekin Accumulated kinetic energy for the mechanism Estr Accumulated elastic strain energy for the mechanism Edmp Energy loss due to damping for the mechanism ierr Error flag
The following contributions are included:
- Potential energy
- Kinetic energy
- Elastic strain energy
- Damping loss
- Date
- 13 Oct 1999
◆ supelloadenergies()
| subroutine energyintegrationmodule::supelloadenergies | ( | type(supelloadtype), intent(inout) | supLoad, |
| logical, intent(in) | linearStatic, | ||
| real(dp), intent(in) | dTime, | ||
| real(dp), intent(inout) | Einp | ||
| ) |
Calculates the incremental work done by a superelement load.
- Parameters
-
supLoad Superelement load to calculate energy for [in] linearStatic If .true., we are doing a linear static analysis [in] dTime Time increment size Einp Accumulated energy done by external forces
- Date
- 17 Apr 2008
◆ tireenergies()
| subroutine energyintegrationmodule::tireenergies | ( | type(tiretype), intent(inout) | tire, |
| real(dp), dimension(3), intent(in) | gravVec, | ||
| real(dp), intent(in) | dTime, | ||
| real(dp), intent(inout) | Epot, | ||
| real(dp), intent(inout) | Ekin, | ||
| real(dp), intent(inout) | Einp | ||
| ) |
Calculates energy contributions from a tire.
- Parameters
-
tire Tire to calculate energies for [in] gravVec Gravitation vector [in] dTime Time increment size Epot Accumulated potential energy for the mechanism Ekin Accumulated kinetic energy for the mechanism Einp Accumulated input energy from external forces and motions
The kinetic and potential energy from the tire mass is calculated, as well as the incremental work done by the tire force from previous to current time step.
- Date
- 31 Oct 2002