Data type representing a prescribed motion object. More...
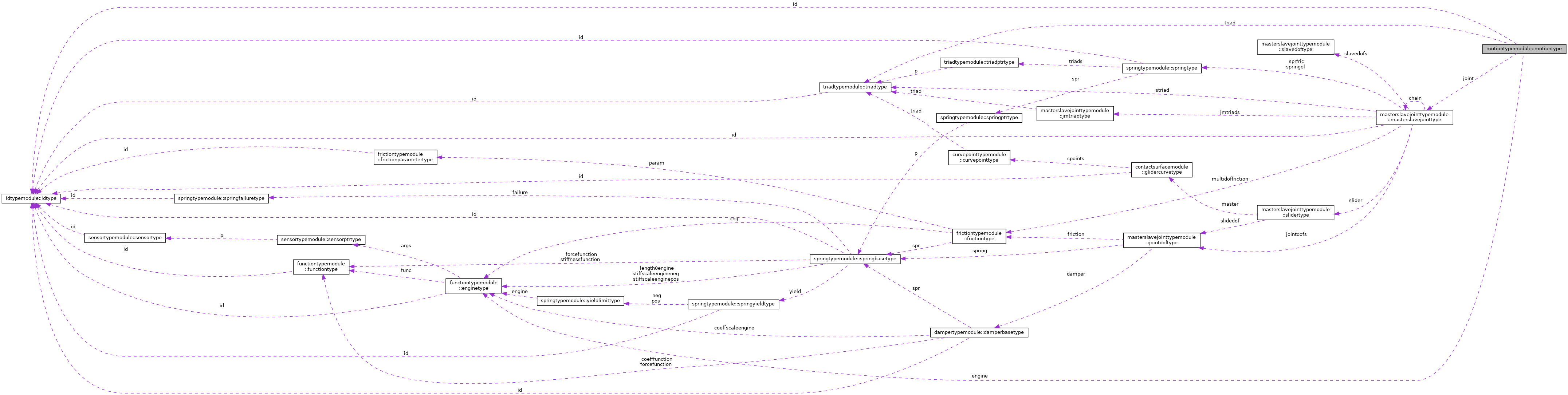
Collaboration diagram for motiontypemodule::motiontype:
Public Attributes | |
| type(idtype) | id |
| General identification data. More... | |
| integer | type |
| Prescribed motion type flag. More... | |
| type(masterslavejointtype), pointer | joint |
| Points to the joint which uses this prescribed motion. More... | |
| type(triadtype), pointer | triad |
| Points to the triad which uses this prescribed motion. More... | |
| integer | dof |
| Local DOF that is prescribed in the joint or triad. More... | |
| integer | ipd |
| Index into the prescribed displacement values array. More... | |
| type(enginetype), pointer | engine |
| Function giving current motion value. More... | |
| real(dp) | d0 |
| Time-independent prescribed motion value. More... | |
| real(dp) | d1 |
| Scaling factor for the prescribed motion function. More... | |
| integer | sdof |
| System DOF that is prescribed. More... | |
| real(dp), pointer | cc |
| Constraint coefficient (points into TTCC) More... | |
| real(dp) | d |
| Current motion value. More... | |
| real(dp), pointer | f |
| Current reaction force (points into RFk) More... | |
| real(dp) | fprev |
| Previous reaction force value. More... | |
| real(dp) | einp |
| Accumulated input energy from this motion. More... | |
| logical, dimension(3) | savevar |
| Flags indicating which variables should be saved. More... | |
Detailed Description
Data type representing a prescribed motion object.
Member Data Documentation
◆ cc
| real(dp), pointer motiontypemodule::motiontype::cc |
Constraint coefficient (points into TTCC)
◆ d
| real(dp) motiontypemodule::motiontype::d |
Current motion value.
◆ d0
| real(dp) motiontypemodule::motiontype::d0 |
Time-independent prescribed motion value.
◆ d1
| real(dp) motiontypemodule::motiontype::d1 |
Scaling factor for the prescribed motion function.
◆ dof
| integer motiontypemodule::motiontype::dof |
Local DOF that is prescribed in the joint or triad.
◆ einp
| real(dp) motiontypemodule::motiontype::einp |
Accumulated input energy from this motion.
◆ engine
| type(enginetype), pointer motiontypemodule::motiontype::engine |
Function giving current motion value.
◆ f
| real(dp), pointer motiontypemodule::motiontype::f |
Current reaction force (points into RFk)
◆ fprev
| real(dp) motiontypemodule::motiontype::fprev |
Previous reaction force value.
◆ id
◆ ipd
| integer motiontypemodule::motiontype::ipd |
Index into the prescribed displacement values array.
◆ joint
| type(masterslavejointtype), pointer motiontypemodule::motiontype::joint |
Points to the joint which uses this prescribed motion.
◆ savevar
| logical, dimension(3) motiontypemodule::motiontype::savevar |
Flags indicating which variables should be saved.
◆ sdof
| integer motiontypemodule::motiontype::sdof |
System DOF that is prescribed.
◆ triad
Points to the triad which uses this prescribed motion.
◆ type
| integer motiontypemodule::motiontype::type |
Prescribed motion type flag.
The documentation for this type was generated from the following file:
- src/vpmSolver/motionTypeModule.f90