Module with subroutines for friction calculations. More...
Data Types | |
| interface | findforceinfriction |
| Computes the total applied force in a joint dof with friction. More... | |
Functions/Subroutines | |
| subroutine, public | updatefrictions (joints, cElems, dt, iter, useRealVel, ierr) |
| Updates the friction forces in all joints and contact elements. More... | |
| subroutine | updatefriction (ierr, dt, deltaT, friction, jDof, joint, cElem) |
| Updates friction forces in the given joint or contact element. More... | |
| subroutine | updatemultidoffriction (ierr, dt, deltaT, friction, joint) |
| Updates multidof friction forces in the given joint. More... | |
| subroutine | findmaxfrictionforce (Fmax, Fequ, Fext, Vel, StickSlip, F0, Coulomb, Stribeck, Vc) |
| Calculates the maximum friction force. More... | |
| subroutine | findfrictionforce (Ffric, Kfric, Xn_1, Vn_1, Fold, dF, lStick, lInit, dT, Fmax, Fext, Ftol, X0, Xn, Vn) |
| Calculates the actual friction force. More... | |
| subroutine, public | addinfrictionforces (joint, sam, SysForce, SysReac, ierr) |
| Adds friction forces for a joint into the given system vectors. More... | |
| subroutine | findjointforceinfriction (joint, sam, RF, Q, Fs, Fd, Fi) |
| Computes the total applied force in a joint DOF with friction. More... | |
| subroutine | findcontactelmforceinfriction (cElem, sam, RF, Q, Fs, Fd, Fi) |
| Computes total applied force in a contact element DOF with friction. More... | |
Detailed Description
Module with subroutines for friction calculations.
Function/Subroutine Documentation
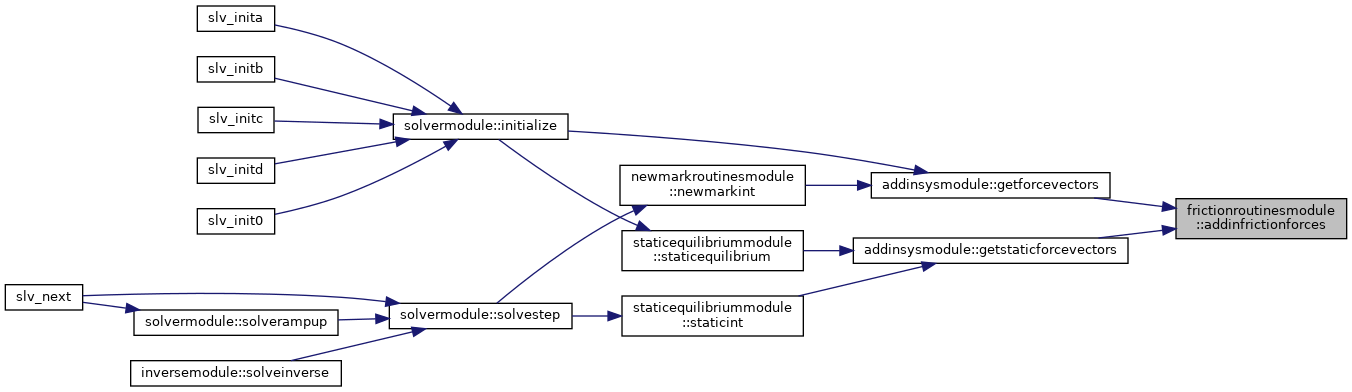
◆ addinfrictionforces()
| subroutine, public frictionroutinesmodule::addinfrictionforces | ( | type(masterslavejointtype), intent(in) | joint, |
| type(samtype), intent(in) | sam, | ||
| real(dp), dimension(:), intent(inout) | SysForce, | ||
| real(dp), dimension(:), intent(inout) | SysReac, | ||
| integer, intent(inout) | ierr | ||
| ) |
Adds friction forces for a joint into the given system vectors.
- Parameters
-
[in] joint The joint owning this friction force [in] sam Data for managing system matrix assembly SysForce System load vector to receive the force contribution SysReac Reaction force container ierr Error flag
- Date
- Nov 2001
- Date
- 25 Jun 2002

◆ findcontactelmforceinfriction()
| subroutine frictionroutinesmodule::findcontactelmforceinfriction | ( | type(contactelementtype), intent(inout) | cElem, |
| type(samtype), intent(in) | sam, | ||
| real(dp), dimension(:), intent(in) | RF, | ||
| real(dp), dimension(:), intent(in) | Q, | ||
| real(dp), dimension(:), intent(in) | Fs, | ||
| real(dp), dimension(:), intent(in), optional | Fd, | ||
| real(dp), dimension(:), intent(in), optional | Fi | ||
| ) |
Computes total applied force in a contact element DOF with friction.
- Parameters
-
cElem The contact element to check for friction forces. [in] sam Data for managing system matrix assembly [in] RF Reaction force container [in] Q External force system vector [in] Fs Stiffness force system vector [in] Fd Damping force system vector [in] Fi Inertia force system vector
The total applies force is equal to the sum of all force contributions to the friction DOF, except for the friction force itself.
- Todo:
- This subroutine is not implemented yet. Currently does nothing.
- Date
- 17 Sep 2007
◆ findfrictionforce()
| subroutine frictionroutinesmodule::findfrictionforce | ( | real(dp), intent(out) | Ffric, |
| real(dp), intent(inout) | Kfric, | ||
| real(dp), intent(inout) | Xn_1, | ||
| real(dp), intent(inout) | Vn_1, | ||
| real(dp), intent(inout) | Fold, | ||
| real(dp), intent(inout) | dF, | ||
| integer, intent(inout) | lStick, | ||
| integer, intent(inout) | lInit, | ||
| real(dp), intent(in) | dT, | ||
| real(dp), intent(in) | Fmax, | ||
| real(dp), intent(in) | Fext, | ||
| real(dp), intent(in) | Ftol, | ||
| real(dp), intent(in) | X0, | ||
| real(dp), intent(in) | Xn, | ||
| real(dp), intent(in) | Vn | ||
| ) |
Calculates the actual friction force.
- Parameters
-
[out] Ffric Current friction force Kfric Relative change in friction force wrt. velocity Xn_1 Position at previous iteration Vn_1 Velocity at previous iteration Fold Friction force at previous iteration dF Friction force change between last two iterations lStick Stick indicator lInit Initialization flag [in] dT Time increment size [in] Fmax The maximum friction force [in] Fext Force that should match friction force on stick [in] Ftol Zero tolerance for friction forces [in] X0 Position at start of current time step [in] Xn Current position [in] Vn Current velocity
See frictiontypemodule::frictiontype::linit for the interpretation of the initialization flag lInit.
- Date
- 11 Mar 1998
- Date
- 09 Jan 2001
- Date
- 22 Aug 2002

◆ findjointforceinfriction()
| subroutine frictionroutinesmodule::findjointforceinfriction | ( | type(masterslavejointtype), intent(inout) | joint, |
| type(samtype), intent(in) | sam, | ||
| real(dp), dimension(:), intent(in) | RF, | ||
| real(dp), dimension(:), intent(in) | Q, | ||
| real(dp), dimension(:), intent(in) | Fs, | ||
| real(dp), dimension(:), intent(in), optional | Fd, | ||
| real(dp), dimension(:), intent(in), optional | Fi | ||
| ) |
Computes the total applied force in a joint DOF with friction.
- Parameters
-
joint The joint to check for friction forces. [in] sam Data for managing system matrix assembly [in] RF Reaction force container [in] Q External force system vector [in] Fs Stiffness force system vector [in] Fd Damping force system vector [in] Fi Inertia force system vector
The total applies force is equal to the sum of all force contributions to the friction DOF, except for the friction force itself.
- Date
- 17 Sep 2007
◆ findmaxfrictionforce()
| subroutine frictionroutinesmodule::findmaxfrictionforce | ( | real(dp), intent(out) | Fmax, |
| real(dp), intent(in) | Fequ, | ||
| real(dp), intent(in) | Fext, | ||
| real(dp), intent(in) | Vel, | ||
| integer, intent(inout) | StickSlip, | ||
| real(dp), intent(in) | F0, | ||
| real(dp), intent(in) | Coulomb, | ||
| real(dp), intent(in) | Stribeck, | ||
| real(dp), intent(in) | Vc | ||
| ) |
Calculates the maximum friction force.
- Parameters
-
[out] Fmax The maximum friction force [in] Fequ Equivalent normal force that creates the friction [in] Fext Force that should match friction force on stick [in] Vel Current velocity in the friction DOF [in] StickSlip Stick/slip indicator [in] F0 Prestress load [in] Coulomb Coulomb friction coefficient [in] Stribeck Magnitude of the Stribeck effect [in] Vc Critical speed of the Stribeck effect
- Date
- 11 Mar 1998
- Date
- 09 Jan 2001
- Date
- 22 Aug 2002

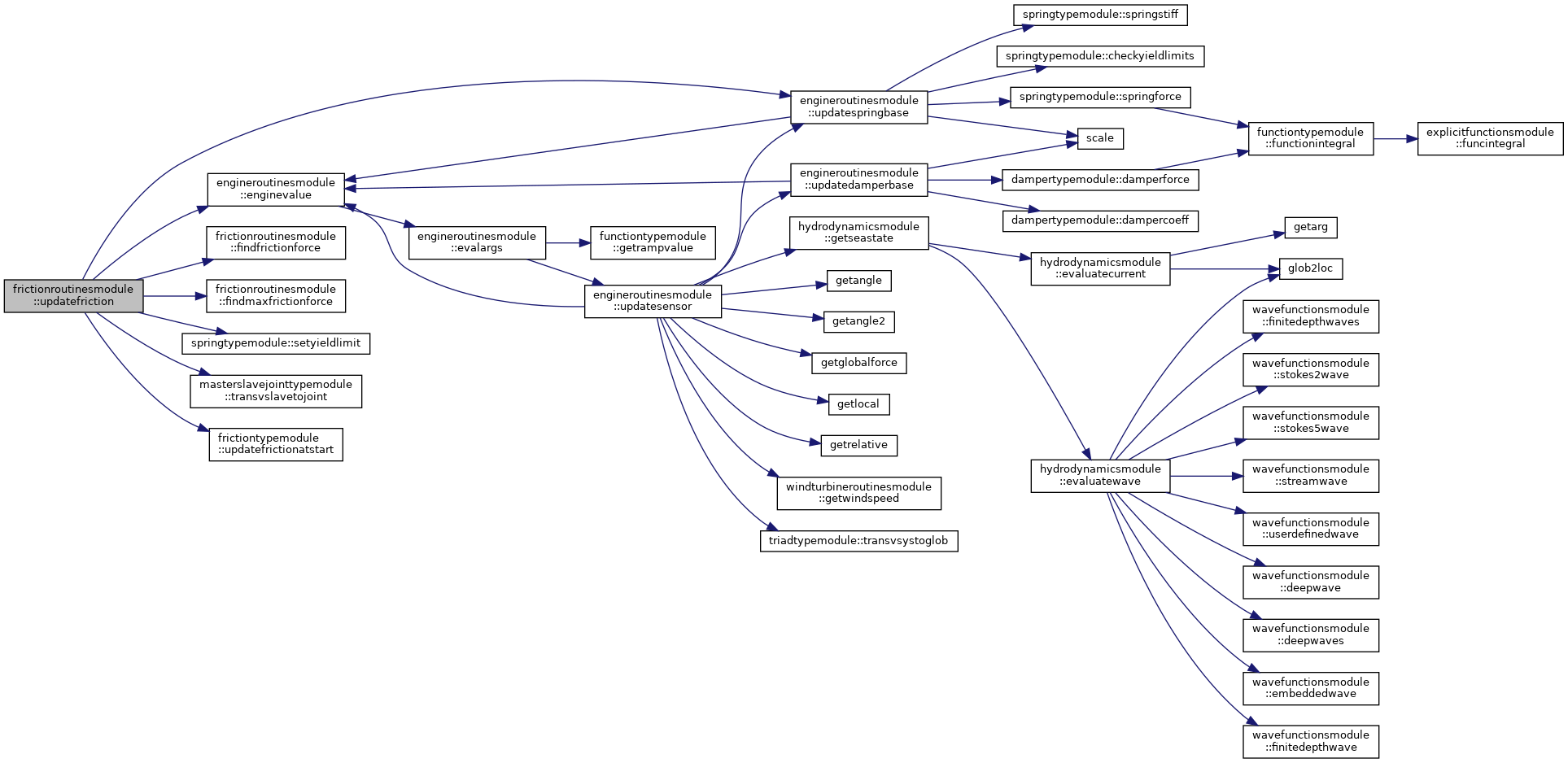
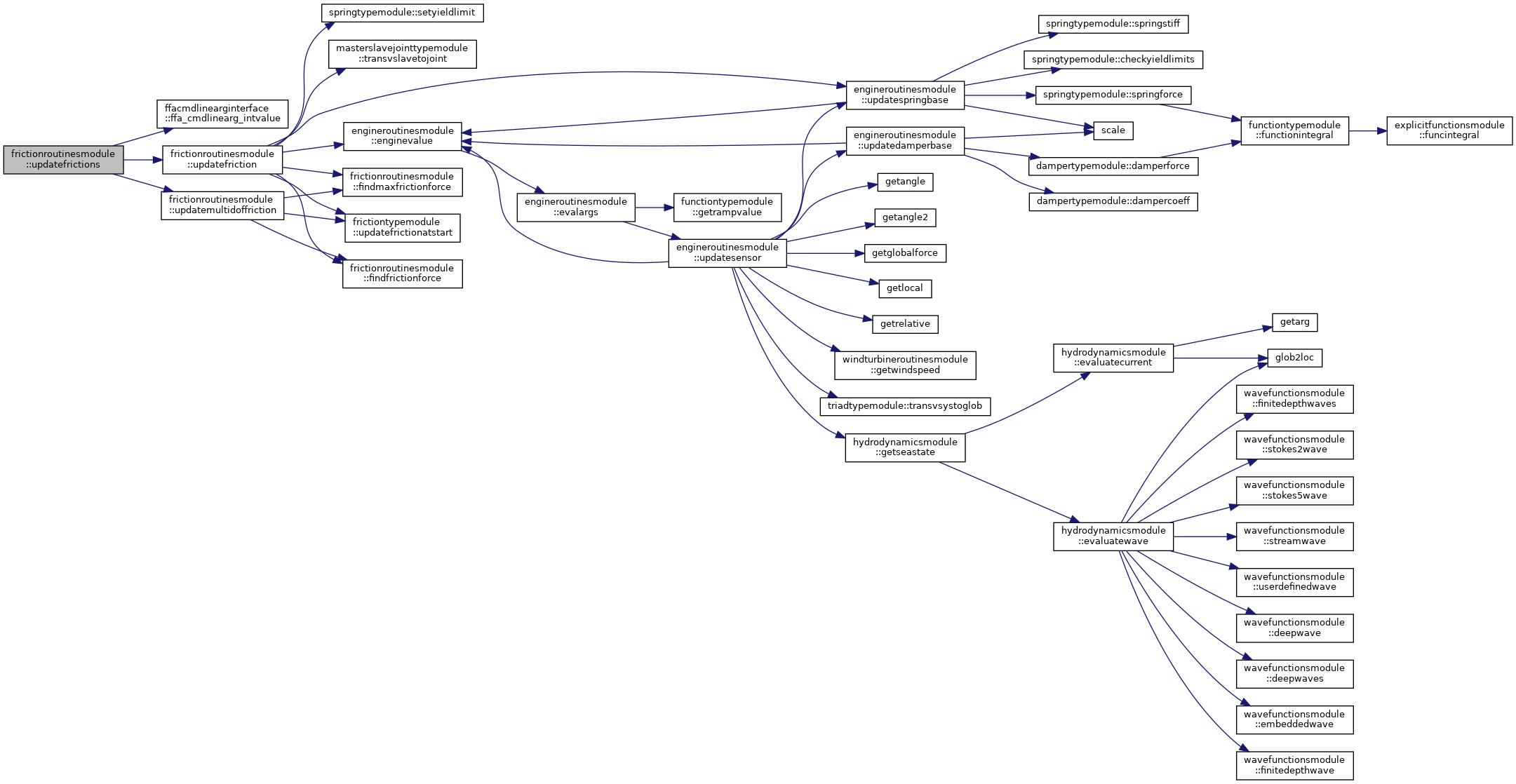
◆ updatefriction()
| subroutine frictionroutinesmodule::updatefriction | ( | integer, intent(inout) | ierr, |
| real(dp), intent(in) | dt, | ||
| real(dp), intent(in) | deltaT, | ||
| type(frictiontype), intent(inout) | friction, | ||
| integer, intent(in), optional | jDof, | ||
| type(masterslavejointtype), intent(in), optional | joint, | ||
| type(contactelementtype), intent(in), optional | cElem | ||
| ) |
Updates friction forces in the given joint or contact element.
- Parameters
-
ierr Error Flag [in] dt Time increment size [in] deltaT Time increment for finite difference velocity calculation friction The friction object to update forces for [in] jDof Local joint DOF of the friction [in] joint The joint owning this friction [in] cElem The contact element owning this friction
- Date
- 20 Dec 1990
- Date
- around 2000
- Date
- 28 Aug 2002
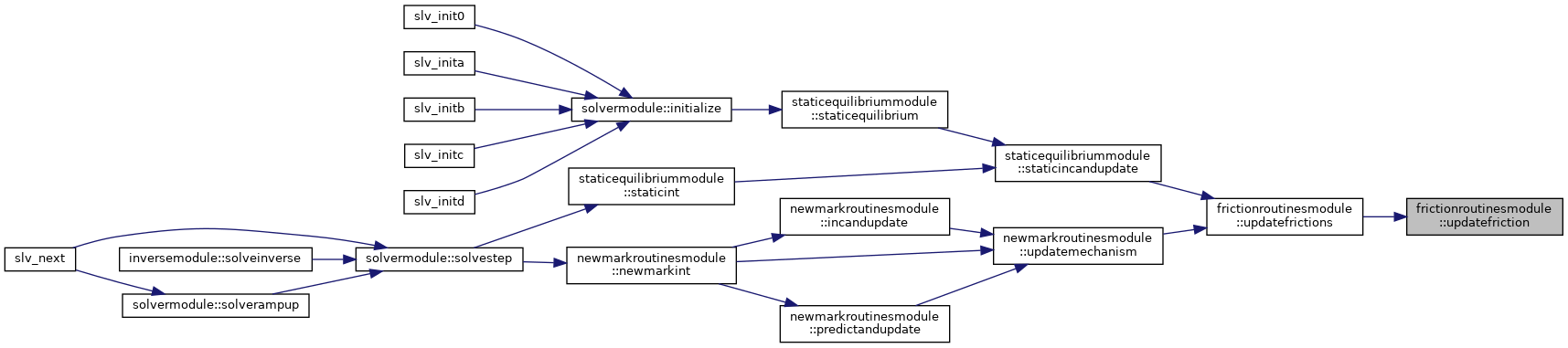
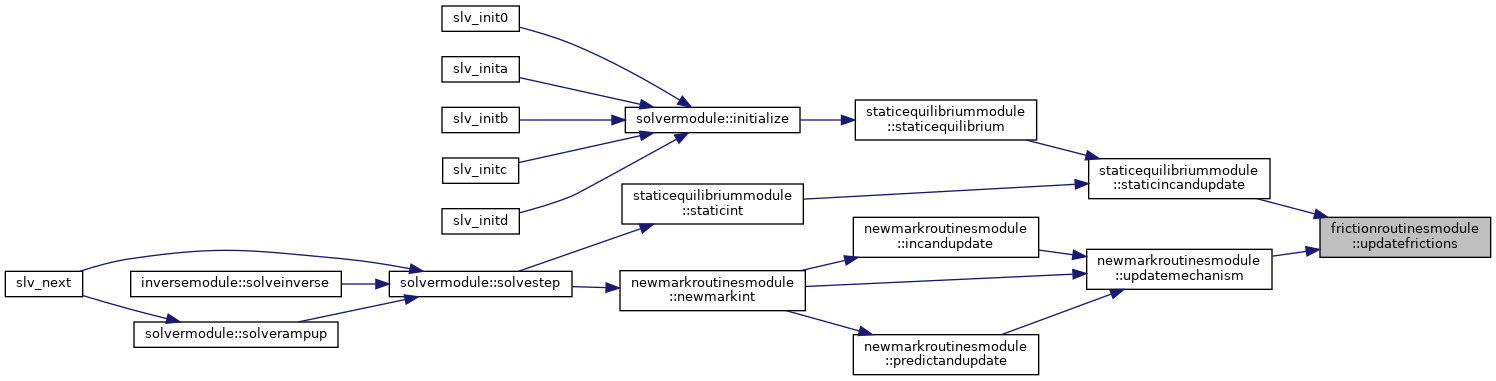
◆ updatefrictions()
| subroutine, public frictionroutinesmodule::updatefrictions | ( | type(masterslavejointtype), dimension(:), intent(inout) | joints, |
| type(contactelementtype), dimension(:), intent(inout) | cElems, | ||
| real(dp), intent(in) | dt, | ||
| integer, intent(in) | iter, | ||
| logical, intent(in) | useRealVel, | ||
| integer, intent(inout) | ierr | ||
| ) |
Updates the friction forces in all joints and contact elements.
- Parameters
-
joints Array of all joints in the model cElems Array of all contact elements in the model [in] dt Time increment size [in] iter Iteration counter [in] useRealVel If .true., the actual velocity is used ierr Error Flag
- Date
- 30 May 2008
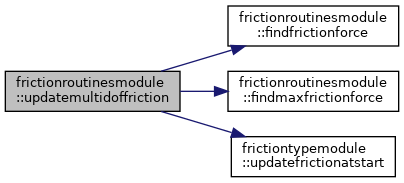
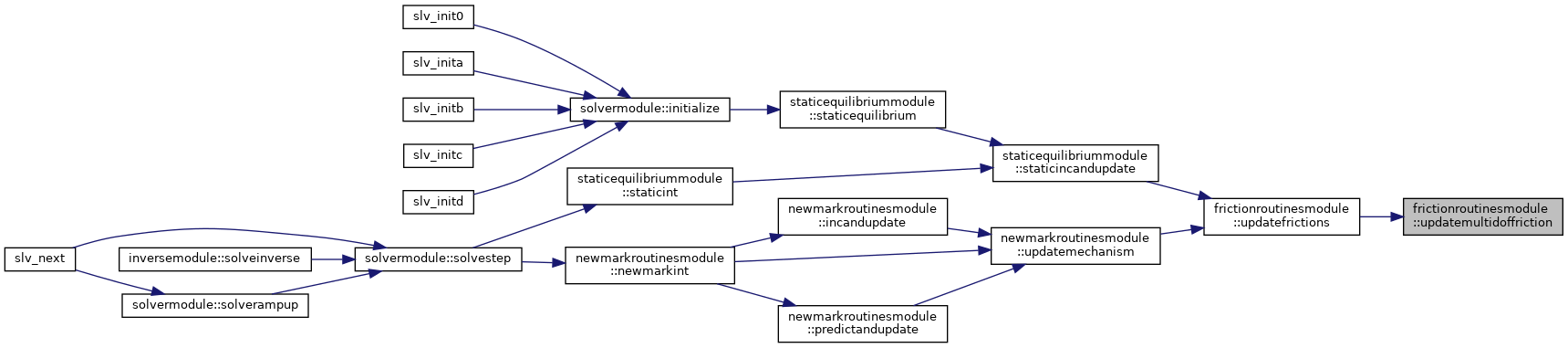
◆ updatemultidoffriction()
| subroutine frictionroutinesmodule::updatemultidoffriction | ( | integer, intent(inout) | ierr, |
| real(dp), intent(in) | dt, | ||
| real(dp), intent(in) | deltaT, | ||
| type(frictiontype), intent(inout) | friction, | ||
| type(masterslavejointtype), intent(inout) | joint | ||
| ) |
Updates multidof friction forces in the given joint.
- Parameters
-
ierr Error Flag [in] dt Time increment size [in] deltaT Time increment for finite difference velocity calculation friction The friction object to update forces for [in] joint The joint owning this friction
- Date
- 25 Apr 2003