Initialization of system data from the solver input file. More...
Functions/Subroutines | |
| subroutine | initiatesystem (sys, engines, tIncEngineId, wFac, err) |
| Initializes system level model data from the command-line arguments. More... | |
| subroutine | initiatesystem2 (sam, sys, err) |
| Allocates the system vectors and Newton matrix. More... | |
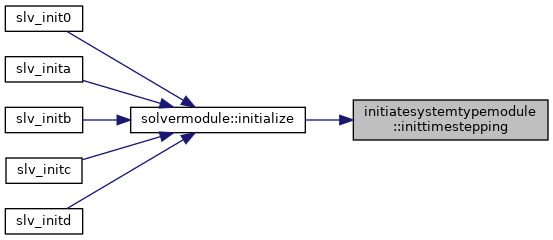
| subroutine | inittimestepping (sys, err) |
| Initializes the time stepping before starting integration loop. More... | |
Variables | |
| real(dp), parameter, private | epst_p = 1.0e-12_dp |
| Zero tolerance for time. More... | |
Detailed Description
Initialization of system data from the solver input file.
Function/Subroutine Documentation
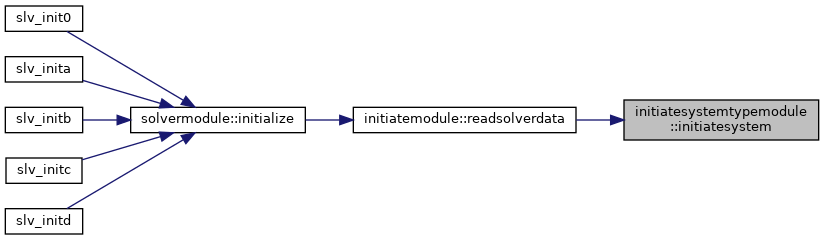
◆ initiatesystem()
| subroutine initiatesystemtypemodule::initiatesystem | ( | type(systemtype), intent(out) | sys, |
| type(enginetype), dimension(:), intent(in) | engines, | ||
| integer, intent(in) | tIncEngineId, | ||
| real(dp), dimension(3), intent(in) | wFac, | ||
| integer, intent(out) | err | ||
| ) |
Initializes system level model data from the command-line arguments.
- Parameters
-
[out] sys System level model data [in] engines All general functions in the model [in] tIncEngineID Base ID of the function returning time step size [in] wFac Weighting factors for the DOFs of different kind, wFac(1)=translations, wFac(2)=rotation, wFac(3)=generalized DOFs [out] err Error flag
Knut Morten Okstad
- Date
- 28 May 2002
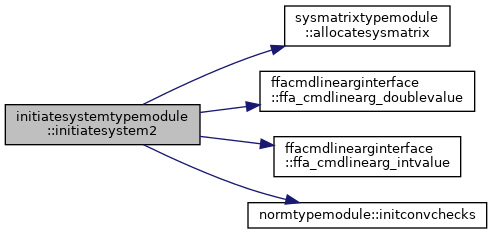
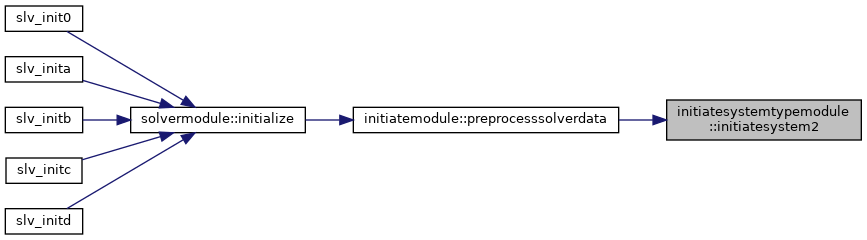
◆ initiatesystem2()
| subroutine initiatesystemtypemodule::initiatesystem2 | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| integer, intent(out) | err | ||
| ) |
Allocates the system vectors and Newton matrix.
- Parameters
-
[in] sam Data for managing system matrix assembly sys System level model data [out] err Error flag
This subroutine allocates all the system vectors (displacement, velocity, acceleration and force vectors) and the system Newton matrix. The dynamic convergence tolerances are also initialized.
- Date
- 28 May 2003
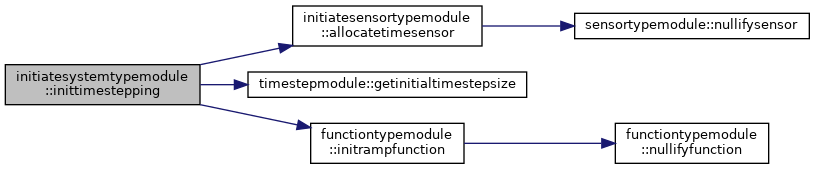
◆ inittimestepping()
| subroutine initiatesystemtypemodule::inittimestepping | ( | type(systemtype), intent(inout) | sys, |
| integer, intent(out) | err | ||
| ) |
Initializes the time stepping before starting integration loop.
- Parameters
-
sys System level model data [out] err Error flag
In case a dynamic ramp-up is specified, the actual start time is shifted back the duration of the ramp-up, such that the start of the actual simulation will happen at the same time as without ramp-up. The number of ramp-up increments is used to define the time increment size during the ramp-up stage. The ramp function is a smooth trajectory function.
Knut Morten Okstad
- Date
- 19 Aug 2022
Variable Documentation
◆ epst_p
|
private |
Zero tolerance for time.