Module with data types representing prescribed motion objects. More...
Data Types | |
| type | motiontype |
| Data type representing a prescribed motion object. More... | |
| interface | writeobject |
| Standard routine for writing an object to file. More... | |
Functions/Subroutines | |
| subroutine | initiatemotions (infp, dispFile, triads, joints, engines, motions, err) |
| Initializes prescribed motions with data from the solver input file. More... | |
| subroutine | initiatemotions2 (motions, mpreac, RF, err) |
| Initializes pointers to reaction forces for the motion type objects. More... | |
| subroutine | writemotiontype (motion, io, complexity) |
| Standard routine for writing an object to file. More... | |
| subroutine | nullifymotion (motion) |
| Initializes the MotionType object. More... | |
| subroutine | deallocatemotions (motions) |
| Deallocates all prescribed moption objects. More... | |
Variables | |
| integer, parameter | prescribeddeflection_p = 0 |
| Deflection type value. More... | |
| integer, parameter | prescribedvelocity_p = 1 |
| Velocity type value. More... | |
| integer, parameter | prescribedacceleration_p = 2 |
| Acceleration type value. More... | |
| character(len=12), dimension(0:2), parameter | motiontype_p = (/ 'deflection ', 'velocity ', 'acceleration' /) |
| Prescribed motion type names. More... | |
Detailed Description
Module with data types representing prescribed motion objects.
The module also contains subroutines for accessing or manipulating the prescribed motion data, and for reading them from the solver input file.
Function/Subroutine Documentation
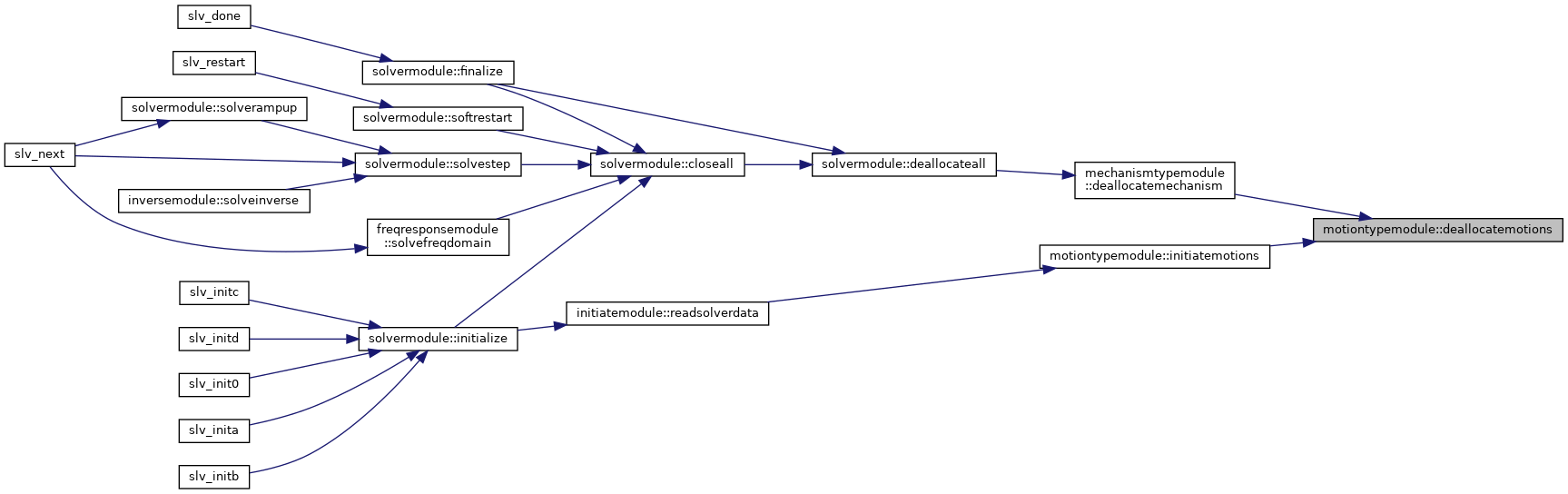
◆ deallocatemotions()
| subroutine motiontypemodule::deallocatemotions | ( | type(motiontype), dimension(:), pointer | motions | ) |
Deallocates all prescribed moption objects.
- Parameters
-
motions Array of all motiontypemodule::motiontype objects
- Date
- 23 Jan 2017
Here is the caller graph for this function:
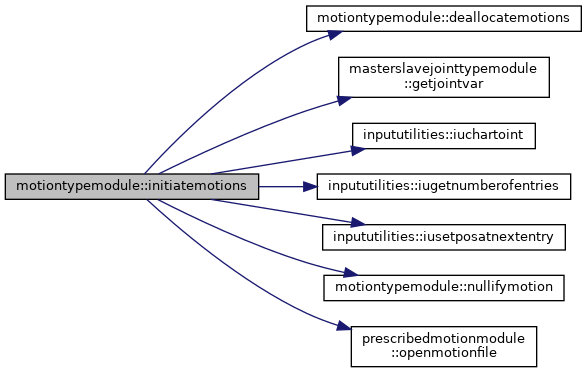
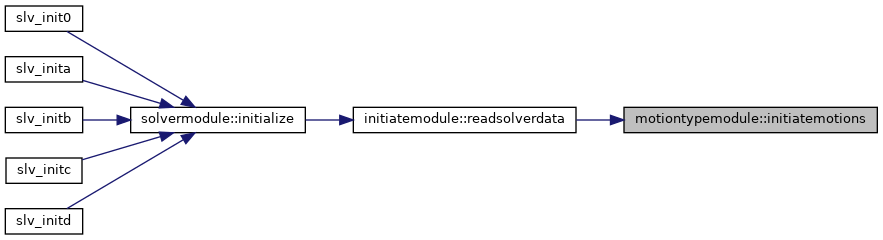
◆ initiatemotions()
| subroutine motiontypemodule::initiatemotions | ( | integer, intent(in) | infp, |
| character(len=*), intent(in) | dispFile, | ||
| type(triadtype), dimension(:), intent(in) | triads, | ||
| type(masterslavejointtype), dimension(:), intent(in) | joints, | ||
| type(enginetype), dimension(:), intent(in) | engines, | ||
| type(motiontype), dimension(:), pointer | motions, | ||
| integer, intent(out) | err | ||
| ) |
Initializes prescribed motions with data from the solver input file.
- Parameters
-
[in] infp File unit number for the solver input file [in] dispFile Name of file to read prescribed displacements from [in] triads Array of all triads in the model [in] joints Array of all joints in the model [in] engines All general functions in the model [out] motions Array of all prescribed motions in the model [out] err Error flag
- Date
- 11 Oct 2004
Here is the call graph for this function:
Here is the caller graph for this function:
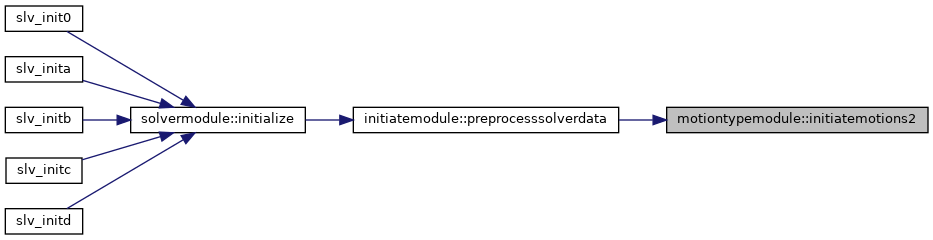
◆ initiatemotions2()
| subroutine motiontypemodule::initiatemotions2 | ( | type(motiontype), dimension(:), intent(inout) | motions, |
| integer, dimension(:), intent(in) | mpreac, | ||
| real(dp), dimension(:), intent(in), target | RF, | ||
| integer, intent(out) | err | ||
| ) |
Initializes pointers to reaction forces for the motion type objects.
- Parameters
-
motions Array of all prescribed motions in the model [in] mpreac Matrix of Pointers to REACtion forces [in] RF Array of reaction force values [out] err Error flag
- Date
- 5 Oct 2005
Here is the caller graph for this function:
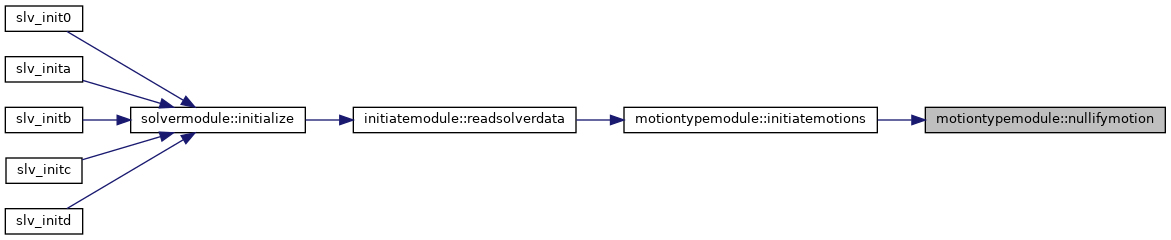
◆ nullifymotion()
| subroutine motiontypemodule::nullifymotion | ( | type(motiontype), intent(out) | motion | ) |
Initializes the MotionType object.
- Parameters
-
motion The motiontypemodule::motiontype object to initialize
- Date
- 11 Oct 2004
Here is the caller graph for this function:
◆ writemotiontype()
| subroutine motiontypemodule::writemotiontype | ( | type(motiontype), intent(in) | motion, |
| integer, intent(in) | io, | ||
| integer, intent(in), optional | complexity | ||
| ) |
Standard routine for writing an object to file.
- Parameters
-
[in] motion The motiontypemodule::motiontype object to write [in] io File unit number to write to [in] complexity If present, the value indicates the amount of print
- Date
- 11 Oct 2004
Variable Documentation
◆ motiontype_p
| character(len=12), dimension(0:2), parameter motiontypemodule::motiontype_p = (/ 'deflection ', 'velocity ', 'acceleration' /) |
Prescribed motion type names.
◆ prescribedacceleration_p
| integer, parameter motiontypemodule::prescribedacceleration_p = 2 |
Acceleration type value.
◆ prescribeddeflection_p
| integer, parameter motiontypemodule::prescribeddeflection_p = 0 |
Deflection type value.
◆ prescribedvelocity_p
| integer, parameter motiontypemodule::prescribedvelocity_p = 1 |
Velocity type value.