Module with subroutines for dynamic simulation in the time domain. More...
Functions/Subroutines | |
| subroutine | predictvelacc (sys, motions, iopAlg, ierr) |
| Starts a time step by computing predicted velocity and acceleration. More... | |
| subroutine | incvelacc (sys) |
| Increment the system velocity- and acceleration vectors. More... | |
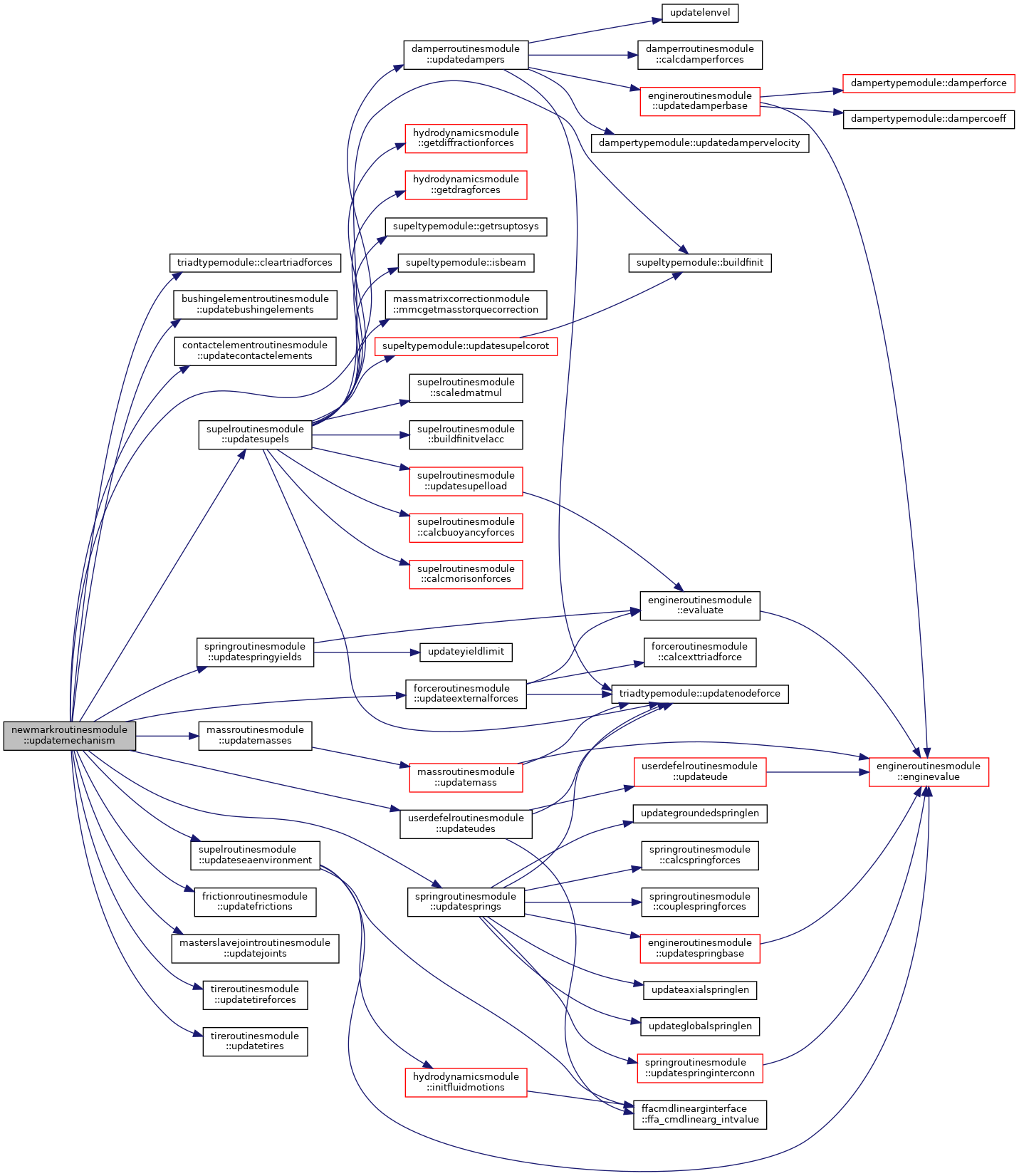
| subroutine | updatemechanism (sys, mech, ierr, newVelocities, updateCTI) |
| Updates all mechanism objects. More... | |
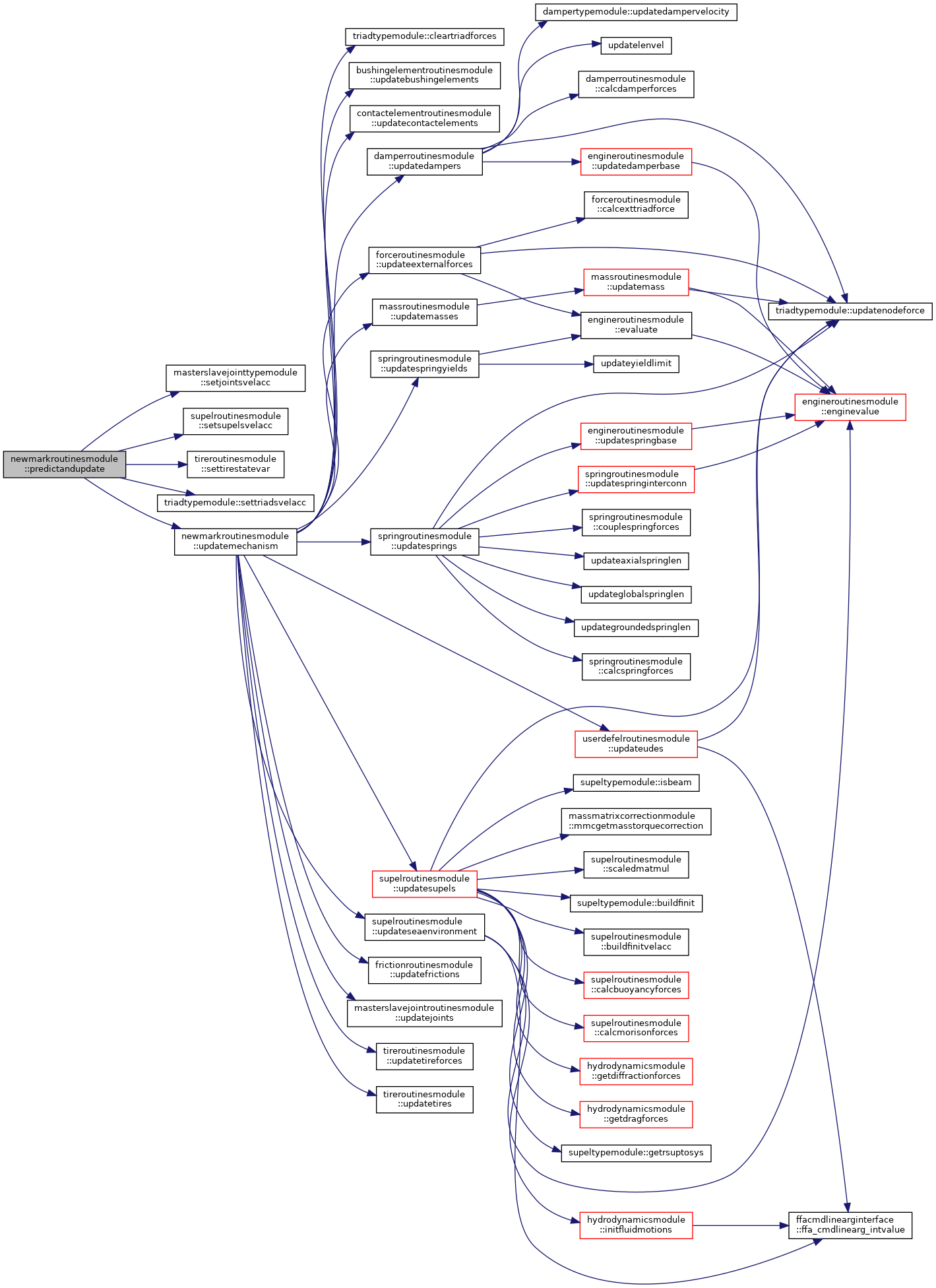
| subroutine, private | predictandupdate (sam, sys, mech, iopAlg, ierr) |
| Updates mechanism based on predicted velocity and acceleration. More... | |
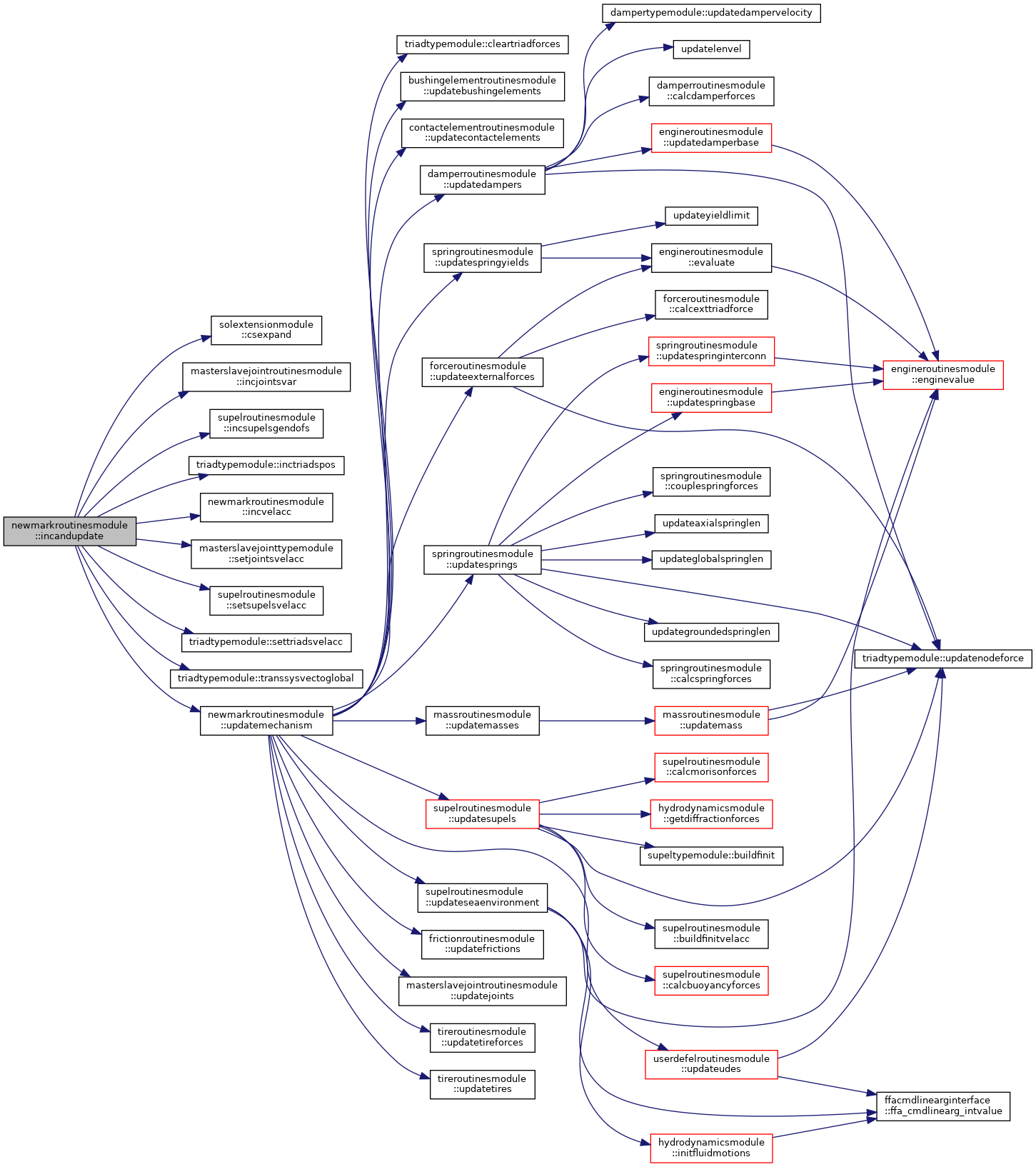
| subroutine | incandupdate (sam, sys, mech, delta, useTotalInc, ierr) |
| Updates mechanism based on corrected velocity and acceleration. More... | |
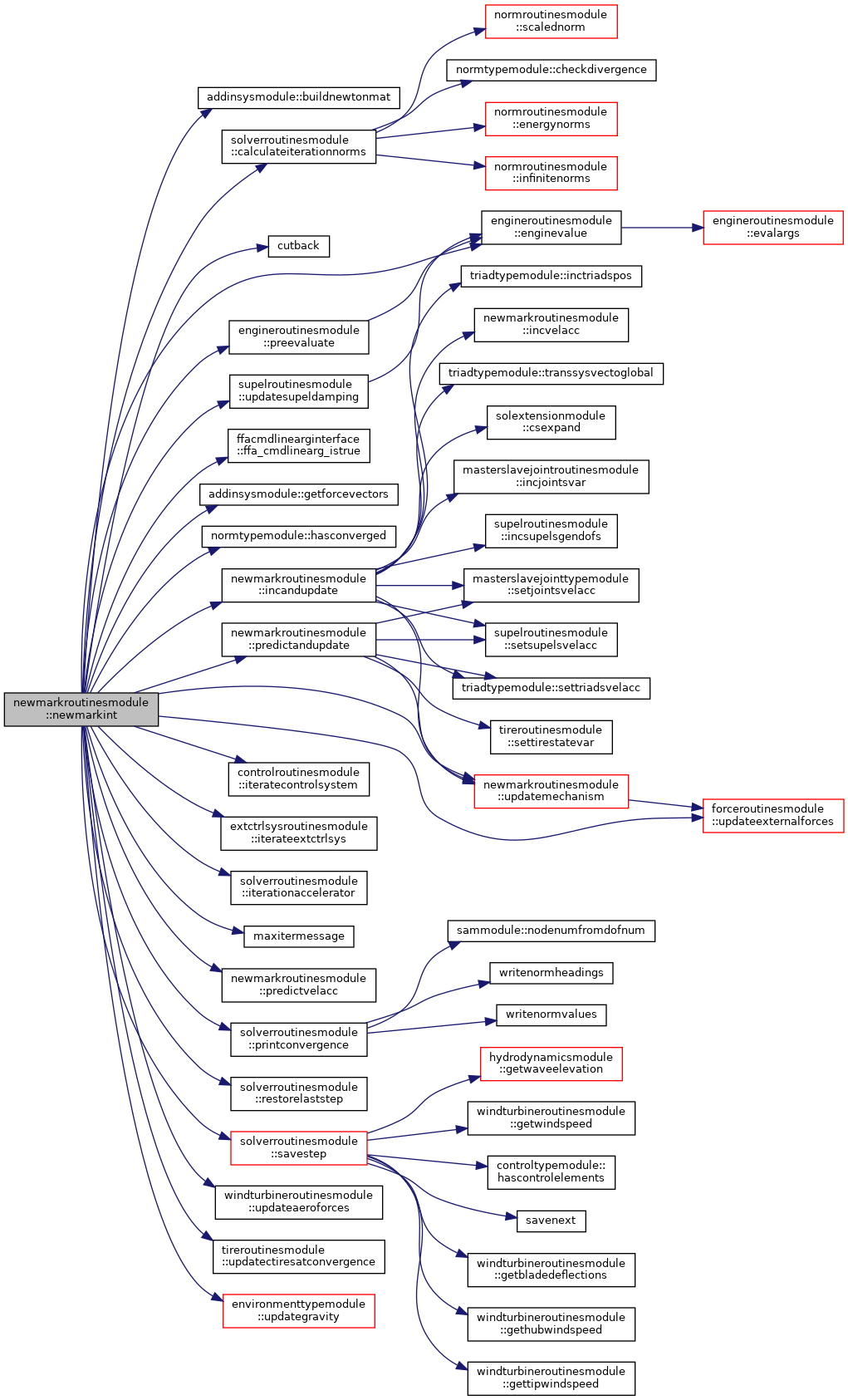
| subroutine | newmarkint (sam, sys, mech, ctrl, alpha, extRhs, iop, NewmarkFlag, resFileFormat, lpu, ierr) |
| Advances the dynamics solution one step forward. More... | |
Detailed Description
Module with subroutines for dynamic simulation in the time domain.
This module contains subroutines implementing the Newmark time integration driver in the FEDEM Dynamics Solver. Both the Hilber-Hughes-Taylor (HHT-α) and the generalized-α methods are supported, and which of these algorithms to use is controlled via the third digit of the NewmarkFlag option (iopAlg):
- iopAlg = 0: Use HHT-α
- iopAlg = 1: Use HHT-α in FENRIS mode
- iopAlg = 2: Use generalized-α
The subroutine newmarkint() is the main driver for the time integration process. It calculates the dynamic equilibrium state of the mechanism through a Newton-Raphson iteration procedure. The time step loop itself is in the caller of this subroutine. All other subroutines in this module are utilities that are invoked by newmarkint() to carry out sub-tasks.
All equation numbers below and elsewhere in the comments in the source code are referring to the the Fedem R7.3 Theory Guide. See the Sections 7.1 to 7.4 there for the derivation.
Function/Subroutine Documentation
◆ incandupdate()
| subroutine newmarkroutinesmodule::incandupdate | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| real(dp), dimension(:), intent(in) | delta, | ||
| logical, intent(in) | useTotalInc, | ||
| integer, intent(out) | ierr | ||
| ) |
Updates mechanism based on corrected velocity and acceleration.
- Parameters
-
[in] sam Data for managing system matrix assembly [in,out] sys System level model data [in,out] mech Mechanism components of the model [in] delta Iterative solution vector correction [in] useTotalInc If .true., use the total solution increment to update position matrices from the previous configuration [out] ierr Error flag
Increment all position, velocity and acceleration variables and bring all mechanism objects up-to-date with the updated configuration.
- Date
- Sep 1999
- Date
- Nov 2001
- Date
- 4 Jun 2002

◆ incvelacc()
| subroutine newmarkroutinesmodule::incvelacc | ( | type(systemtype), intent(inout) | sys | ) |
Increment the system velocity- and acceleration vectors.
- Parameters
-
[in,out] sys System level model data
Also calculates tolerance variables for use in convergence check.
- Date
- Jun 2002

◆ newmarkint()
| subroutine newmarkroutinesmodule::newmarkint | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| type(controltype), intent(inout) | ctrl, | ||
| real(dp), dimension(2), intent(in) | alpha, | ||
| real(dp), dimension(:), intent(in), optional | extRhs, | ||
| integer, intent(inout) | iop, | ||
| integer, intent(in) | NewmarkFlag, | ||
| integer, intent(inout) | resFileFormat, | ||
| integer, intent(in) | lpu, | ||
| integer, intent(out) | ierr | ||
| ) |
Advances the dynamics solution one step forward.
- Parameters
-
[in] sam Data for managing system matrix assembly [in,out] sys System level model data [in,out] mech Mechanism components of the model [in,out] ctrl Control system data [in] alpha Global structural damping parameters [in] extRhs Additional external forces set by external process [in,out] iop Control variable defining what to do (see below) [in] NewmarkFlag Time integration control variable (see below) [in,out] resFileFormat Flag for res-file output of convergence history [in] lpu File unit number for res-file output [out] ierr Error flag
This subroutine performs different sub-tasks of the solution process, depending on the value of the control variable iop, as follows:
- = 0 : Normal operation, solve the entire step with Newton-iterations
- = -1 : Establish the linearized system of the first iteration (the prediction step), and then return to the caller
- = -2 : Same as -1, but also factorize the Newton matrix
- = -3 : Same as 0, but this is the first time step after restart
- = 2 : We are doing Newmark iterations (internal mode)
- = 4 : Do one Newmark iteration on the existing linear system
- = 6 : As 4, and then continue until equilibrium
- = 16 : As 6, but include triangularization of existing equation system
The NewmarkFlag variable is used to select among slightly different versions of the Newmark time integrator. It is a three-digit value (cba) where each of the digits has the following interpretation:
- a = 1 : Use actual inertia force computed from the residual of the previous increment in the right-hand-side calculation, see eqs. (7.46), (7.53) and (7.55).
- a = 2 : As for a = 1, but in addition the damping contribution to the force predictor, eq. (7.53), is calculated consistently for nonlinear dampers, see note ii) below.
- b > 0 : Use total solution increment in the configuration updates
- c = 1 : Use an HHT-α algorithm equivalent to FENRIS, that is, the force predictor is computed from eq. (7.52) and not (7.53).
- c = 2 : Use generalized-α algorithm, see Section 7.4.3.
- Note
- i) If a = 0 (default setting), then the last computed inertia force (FIk) is used instead in the right-hand-side calculation in place of the eq. (7.46) quantity.
- ii) a = 2 is equivalent to a = 1 unless the model contains nonlinear dampers and/or hydrodynamic drag. If a < 2 and nonlinear dampers exist, the damping force contribution to the predictor is calculated by evaluating the nonlinear force-velocity curve for the predicted velocity (dk), instead of multiplying the tangent damping matrix by the velocity according to eq. (7.53). This is a simplification and not strictly consistent, but the option a < 2 is retained as default for backward compatibility.
- iii) The third digit c is equivalent to the variable iopAlg elsewhere in this documentation. c > 0 also implies a = 2.
- Date
- 1 Jun 1983
- Date
- 4 Feb 1989
- Date
- Des 1998
- Date
- Mar 2002
- Date
- 9 Jun 2002

◆ predictandupdate()
|
private |
Updates mechanism based on predicted velocity and acceleration.
- Parameters
-
[in] sam Data for managing system matrix assembly [in] sys System level model data [in,out] mech Mechanism components of the model [in] iopAlg Algorithm option [out] ierr Error flag
- Date
- 7 Jun 2002

◆ predictvelacc()
| subroutine newmarkroutinesmodule::predictvelacc | ( | type(systemtype), intent(inout) | sys, |
| type(motiontype), dimension(:), intent(inout) | motions, | ||
| integer, intent(in) | iopAlg, | ||
| integer, intent(out) | ierr | ||
| ) |
Starts a time step by computing predicted velocity and acceleration.
- Parameters
-
[in,out] sys System level model data [in,out] motions All prescribed motions in the model [in] iopAlg Algorithm option [out] ierr Error flag
- Date
- 3 Jun 2002

◆ updatemechanism()
| subroutine newmarkroutinesmodule::updatemechanism | ( | type(systemtype), intent(in) | sys, |
| type(mechanismtype), intent(inout) | mech, | ||
| integer, intent(out) | ierr, | ||
| logical, intent(in), optional | newVelocities, | ||
| integer, intent(in), optional | updateCTI | ||
| ) |
Updates all mechanism objects.
- Parameters
-
[in] sys System level model data [in,out] mech Mechanism components of the model [in] newVelocities Indicates whether new velocities are available. If not present, Tire and friction objects are not updated. [in] updateCTI Tire update flag [out] ierr Error flag
- Date
- 7 Jun 2002