Initialisation of the SAM data structure for the dynamics solver. More...
Functions/Subroutines | |
| subroutine | initsam (sam, ierr) |
| Initializes the SAM data structure for fedem_solver. More... | |
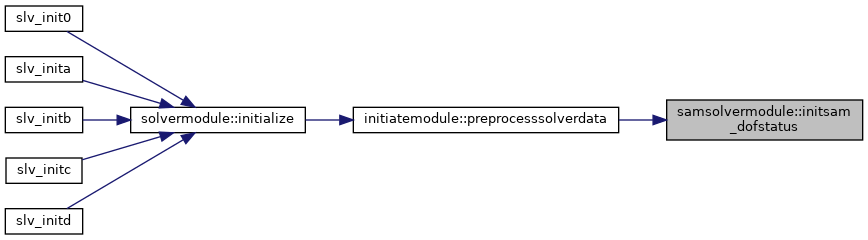
| subroutine | initsam_dofstatus (triads, sups, joints, mpar, madof, msc, dofType, ierr) |
| Initializes some nodal/dof arrays in SAM. More... | |
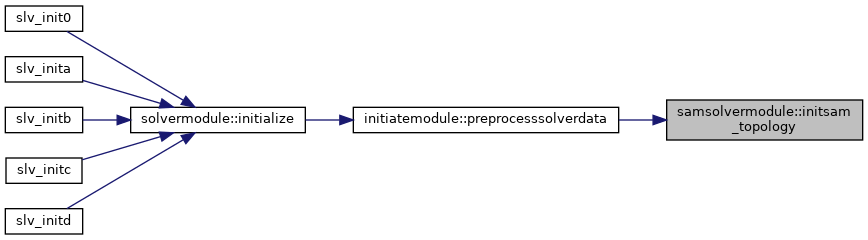
| subroutine | initsam_topology (sups, springs, dampers, joints, bElems, cElems, uElems, masses, tires, mpar, mmnpc, mpmnpc, ierr) |
| Initializes element topology arrays in SAM. More... | |
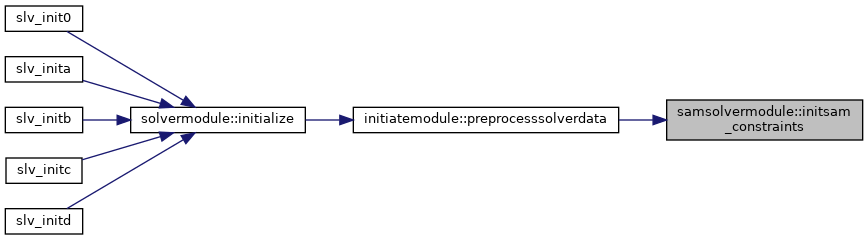
| subroutine | initsam_constraints (motions, joints, higherPairs, mpar, madof, msc, mpmceq, mmceq, ttcc, mpreac, ierr) |
| Initializes linear coupling arrays in SAM. More... | |
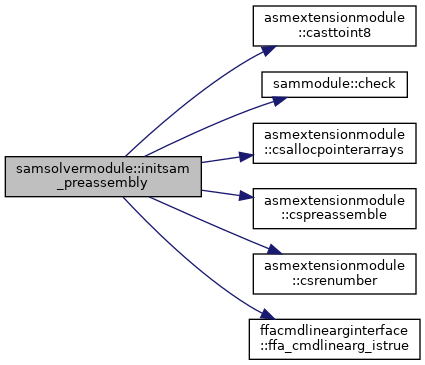
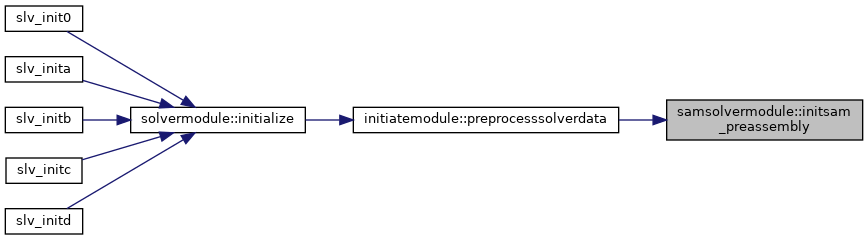
| subroutine | initsam_preassembly (sam, sysMat, ierr) |
| Does final initialization of SAM (nodal reordering and preassembly). More... | |
Variables | |
| integer, parameter, private | tradof_p = 1 |
| Translational DOF type flag. More... | |
| integer, parameter, private | rotdof_p = 2 |
| Rotational DOF type flag. More... | |
| integer, parameter, private | gendof_p = 3 |
| Generalized DOF type flag. More... | |
Detailed Description
Initialisation of the SAM data structure for the dynamics solver.
Function/Subroutine Documentation
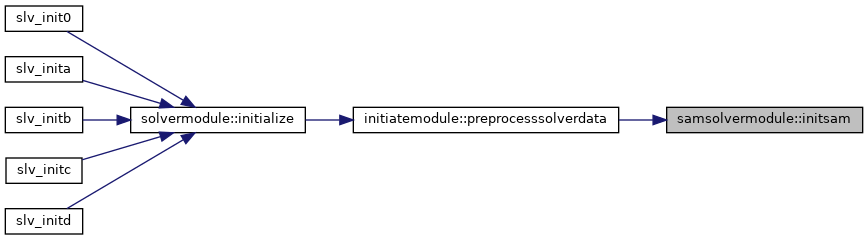
◆ initsam()
| subroutine samsolvermodule::initsam | ( | type(samtype), intent(out) | sam, |
| integer, intent(out) | ierr | ||
| ) |
Initializes the SAM data structure for fedem_solver.
- Parameters
-
[out] sam Data for managing system matrix assembly [out] ierr Error flag
- Date
- 21 Jul 2000
◆ initsam_constraints()
| subroutine samsolvermodule::initsam_constraints | ( | type(motiontype), dimension(:), intent(inout) | motions, |
| type(masterslavejointtype), dimension(:), intent(inout), target | joints, | ||
| type(higherpairtype), dimension(:), intent(inout) | higherPairs, | ||
| integer, dimension(:), intent(inout) | mpar, | ||
| integer, dimension(:), intent(in) | madof, | ||
| integer, dimension(:), intent(inout) | msc, | ||
| integer, dimension(:), pointer | mpmceq, | ||
| integer, dimension(:), pointer | mmceq, | ||
| real(dp), dimension(:), pointer | ttcc, | ||
| integer, dimension(:), pointer | mpreac, | ||
| integer, intent(out) | ierr | ||
| ) |
Initializes linear coupling arrays in SAM.
- Parameters
-
motions All prescribed motions in the model joints All joints in the model higherPairs All higher pair objects in the model mpar Matrix of parameters [in] madof Matrix of accumulated DOFs [in] msc Matrix of status codes [out] mpmceq Matrix of pointers to MCEQs [out] mmceq Matrix of constraint equation definitions [out] ttcc Table of constraint equation coefficients [out] mpreac Matrix of pointers to reaction forces [out] ierr Error flag
This subroutine initializes the SAM arrays MPMCEQ, MMCEQ and TTCC based on Motion and Joint data. The array TTCC is here only initialized to zero (except for the higher pair constraints). The numerical values of the constraint equations are calculated by the subroutines updateDependencies and updatePrescribedMotions. The array MPREAC is also initialized by this subroutine based on Motion data and the fixed DOFs.
- Date
- 16 Oct 2000
- Date
- 13 Oct 2004
◆ initsam_dofstatus()
| subroutine samsolvermodule::initsam_dofstatus | ( | type(triadtype), dimension(:), intent(inout) | triads, |
| type(supeltype), dimension(:), intent(inout) | sups, | ||
| type(masterslavejointtype), dimension(:), intent(inout) | joints, | ||
| integer, dimension(:), intent(inout) | mpar, | ||
| integer, dimension(:), pointer | madof, | ||
| integer, dimension(:), pointer | msc, | ||
| integer, dimension(:), pointer | dofType, | ||
| integer, intent(out) | ierr | ||
| ) |
Initializes some nodal/dof arrays in SAM.
- Parameters
-
triads All triads in the model sups All superelements in the model joints All joints in the model mpar Matrix of parameters [out] madof Matrix of accumulated DOFs [out] msc Matrix of status codes [out] dofType Type flag for each DOF [out] ierr Error flag
This subroutine initializes the SAM arrays MADOF and MSC based on Triad, SupEl and Joint data. It also sets the type flag for each DOF (translational, rotational or generalized).
- Date
- 21 Jul 2000
◆ initsam_preassembly()
| subroutine samsolvermodule::initsam_preassembly | ( | type(samtype), intent(inout) | sam, |
| type(sysmatrixtype), intent(out) | sysMat, | ||
| integer, intent(out) | ierr | ||
| ) |
Does final initialization of SAM (nodal reordering and preassembly).
- Parameters
-
sam Data for managing system matrix assembly [out] sysMat System matrix to perform preassembly for [out] ierr Error flag
- Date
- 26 Jul 2000
◆ initsam_topology()
| subroutine samsolvermodule::initsam_topology | ( | type(supeltype), dimension(:), intent(inout) | sups, |
| type(springtype), dimension(:), intent(inout) | springs, | ||
| type(dampertype), dimension(:), intent(inout) | dampers, | ||
| type(masterslavejointtype), dimension(:), intent(inout) | joints, | ||
| type(bushingelementtype), dimension(:), intent(inout) | bElems, | ||
| type(contactelementtype), dimension(:), intent(inout) | cElems, | ||
| type(userdefeltype), dimension(:), intent(inout) | uElems, | ||
| type(masstype), dimension(:), intent(inout) | masses, | ||
| type(tiretype), dimension(:), intent(inout) | tires, | ||
| integer, dimension(:), intent(inout) | mpar, | ||
| integer, dimension(:), pointer | mmnpc, | ||
| integer, dimension(:), pointer | mpmnpc, | ||
| integer, intent(out) | ierr | ||
| ) |
Initializes element topology arrays in SAM.
- Parameters
-
sups All superelements in the model springs All axial springs in the model dampers All axial dampers in the model joints All joints in the model bElems All bushing elements in the model cElems All contact elements in the model uElems All user-defined elements in the model masses All masses in the model tires All tires in the model mpar Matrix of parameters [out] mmnpc Matrix of nodal point correspondances [out] mpmnpc Matrix of pointers to MNPCs [out] ierr Error flag
This subroutine initializes the SAM arrays MMNPC and MPMNPC based on SupEl, Spring, Damper, Joint and Tire data, and based on Bushing-, Contact-, User-defined- and Mass-element data.
- Date
- 21 Jul 2000
Variable Documentation
◆ gendof_p
|
private |
Generalized DOF type flag.
◆ rotdof_p
|
private |
Rotational DOF type flag.
◆ tradof_p
|
private |
Translational DOF type flag.