Module with some generic solver utilities. More...
Functions/Subroutines | |
| subroutine | calculateiterationnorms (sam, sys, iter, ierr) |
| Calculates all iteration norms defined in the system. More... | |
| subroutine | calculateiterationtolerances (sam, sys) |
| Calculates all iteration tolerances defined in the system. More... | |
| subroutine | iterationaccelerator (iter, res, del, ierr) |
| Accelerates the solution increment in case of line search. More... | |
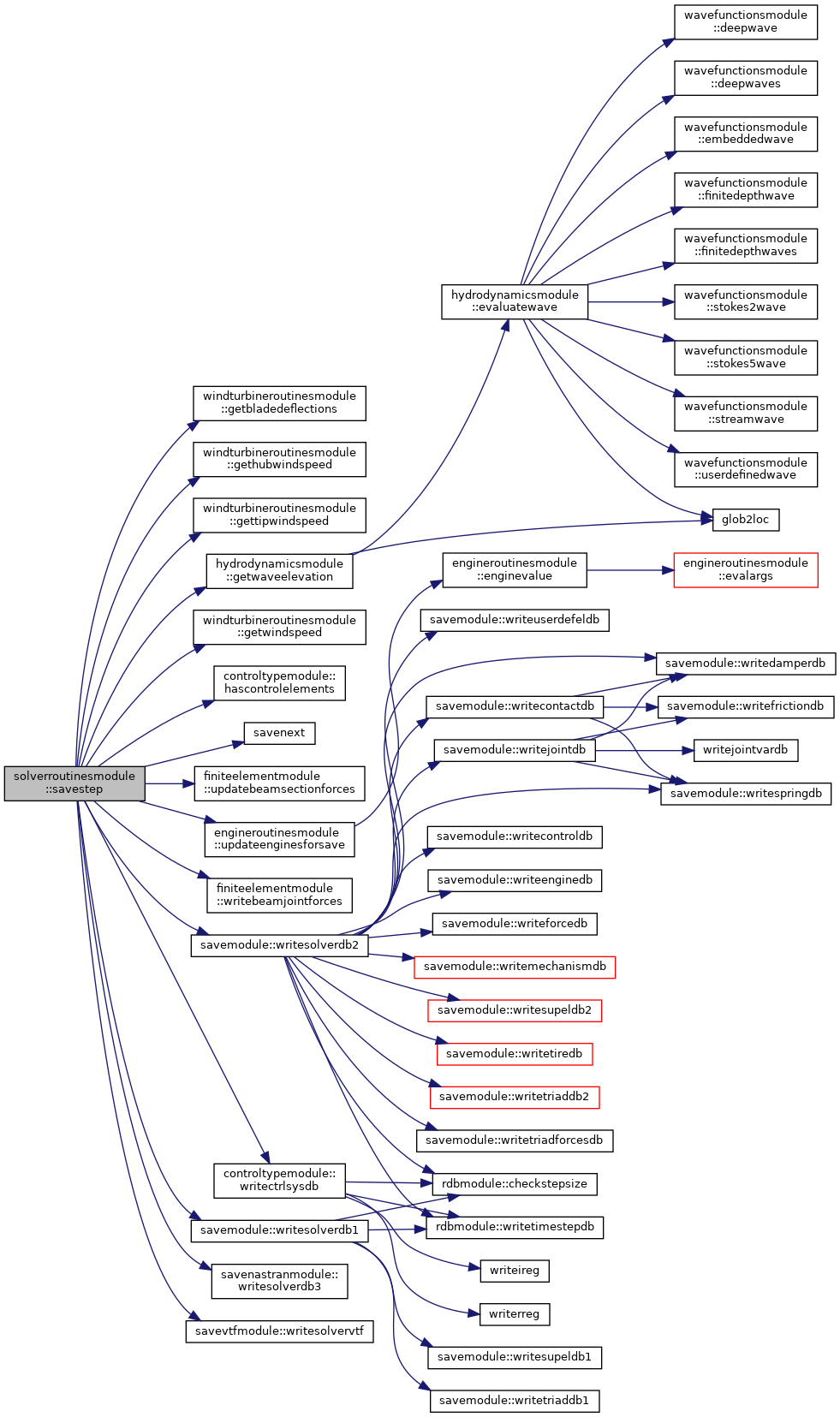
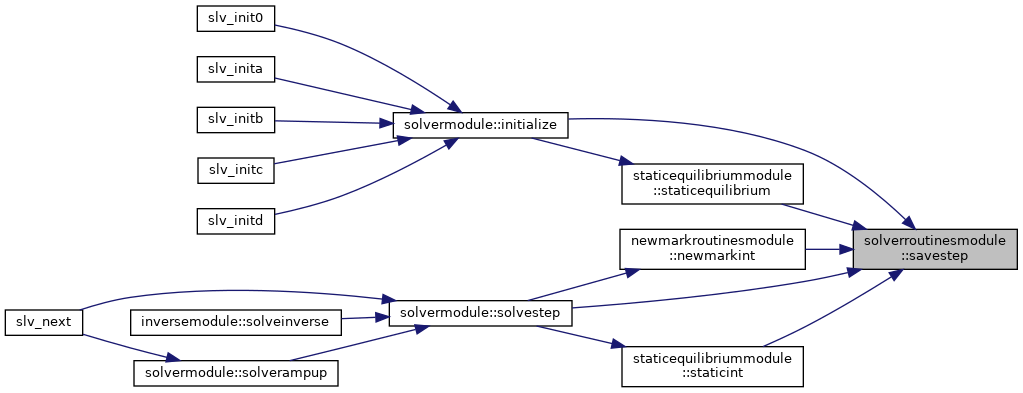
| subroutine | savestep (sys, mech, ctrl, ierr, checkTimeStep) |
| Saves response variables of current time step to file. More... | |
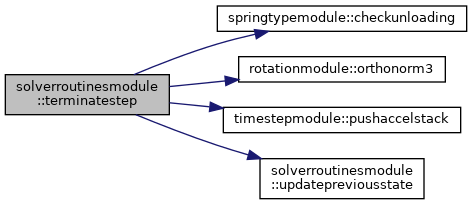
| subroutine | terminatestep (sam, sys, mech, ctrl, linearStatic, finalStep, ierr) |
| Terminates a time step by doing some final calculations. More... | |
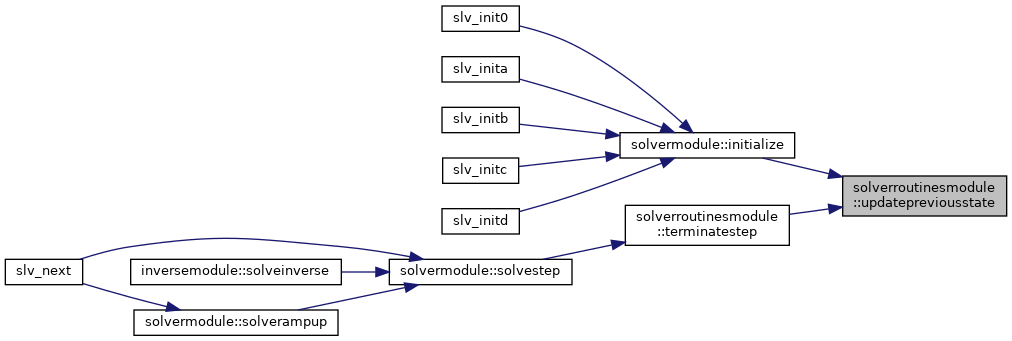
| subroutine | updatepreviousstate (sam, sys, mech, ierr) |
| Updates the previous state variables in the mechanism objects. More... | |
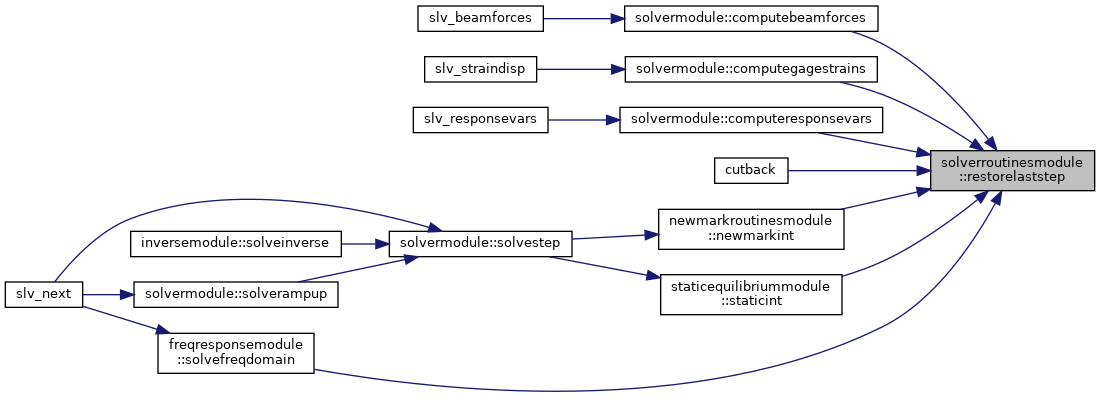
| subroutine | restorelaststep (sam, sys, mech) |
| Restores all state variables from the last converged time step. More... | |
| subroutine | clearvelacc (triads, joints, notify) |
| Clears velocity and acceleration variables in the triads and joints. More... | |
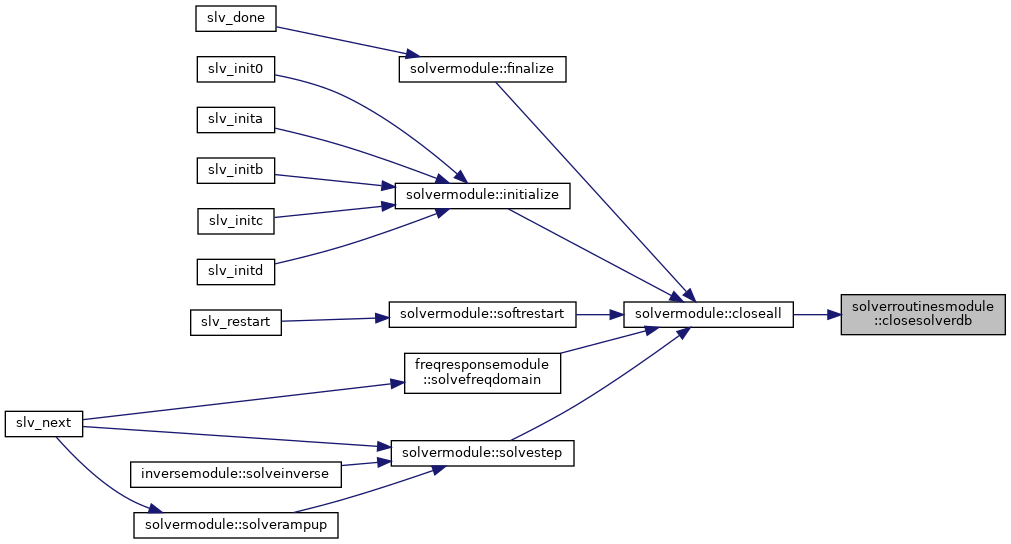
| subroutine | closesolverdb (mech, anyRes, ierr) |
| Closes all solver data base files before program termination. More... | |
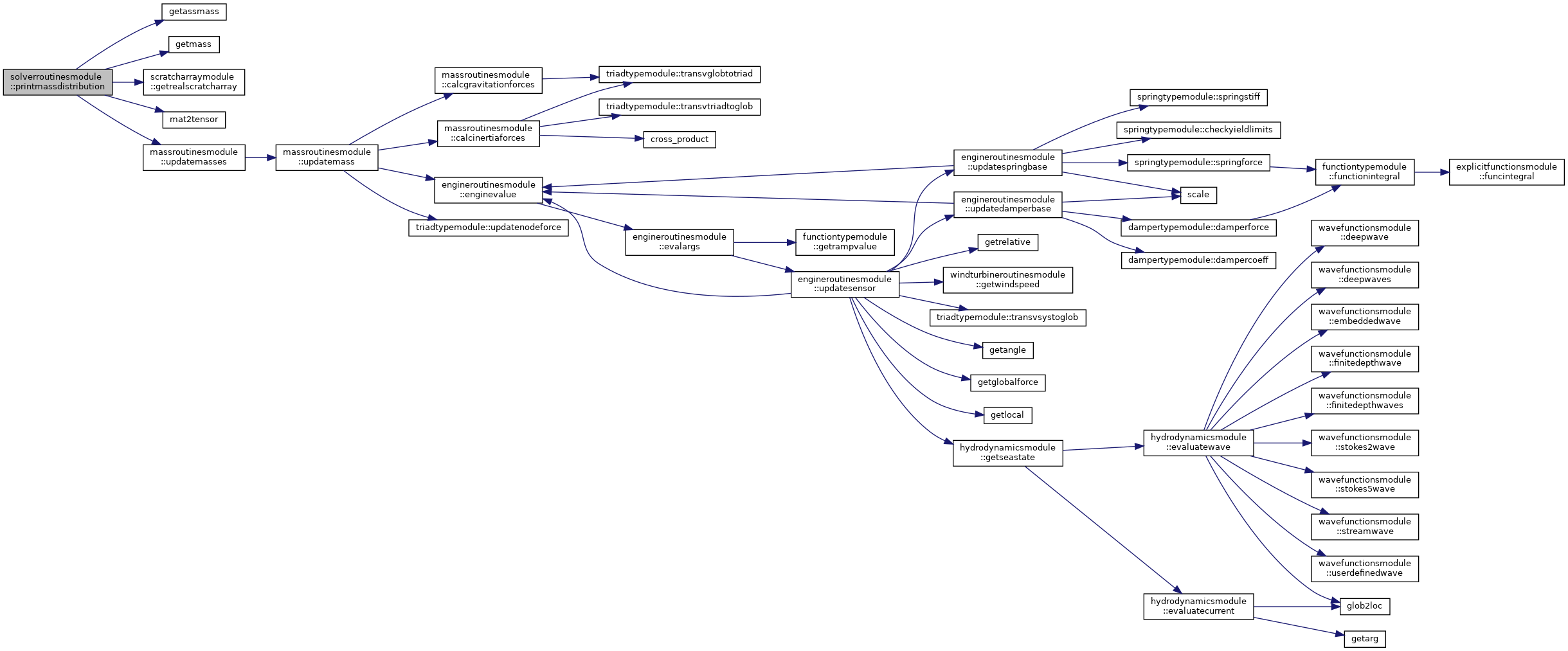
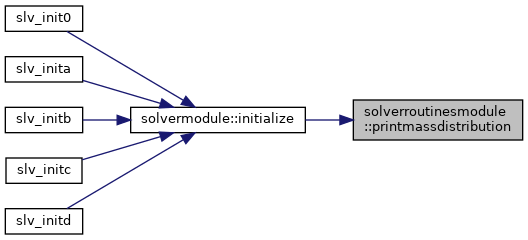
| subroutine | printmassdistribution (sups, masses, tires, elms, gravity, totMass, lpu) |
| Prints a summary of the mass distribution to the res-file. More... | |
| subroutine | printresults (time, triads, sups, iprint, lpu) |
| Prints basic simulation variables to the res-file. More... | |
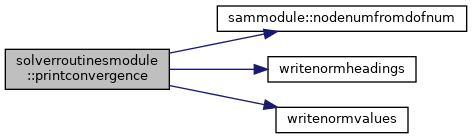
| subroutine | printconvergence (lpu, fileFormat, iStep, iter, tanUpdate, time, timeStep, del, res, convData, sam, mech) |
| Prints convergence information to the res-file. More... | |
Variables | |
| integer(ik), dimension(:), allocatable, save | meqerr |
| All singular equations found. More... | |
| real(dp), dimension(4), save, private | lastime = -1.0e99_dp |
| Previous save times. More... | |
Detailed Description
Module with some generic solver utilities.
This module contains utility subroutines for the Dynamics Solver that are not related to any specific solution algorithm or mechanism part. Many of the subroutines and functions of this module are not documented. You have to configure doxygen with the option ENABLED_SECTIONS = FULL_DOC to extract detailed documentation of those subroutines and functions.
Function/Subroutine Documentation
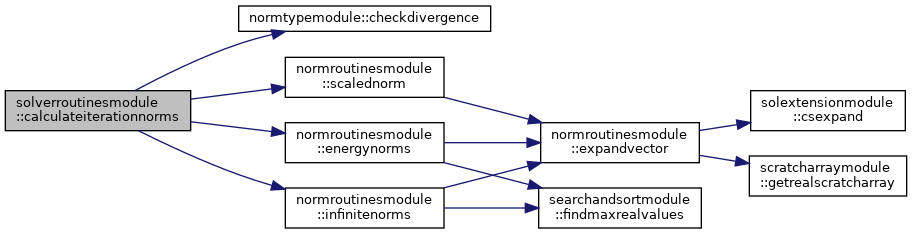
◆ calculateiterationnorms()
| subroutine solverroutinesmodule::calculateiterationnorms | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| integer, intent(in) | iter, | ||
| integer, intent(out) | ierr | ||
| ) |
Calculates all iteration norms defined in the system.
- Parameters
-
[in] sam Data for managing system matrix assembly sys System level model data [in] iter Iteration counter [out] ierr Error flag
- Date
- 12 Apr 2003
- Date
- 29 Jan 2004

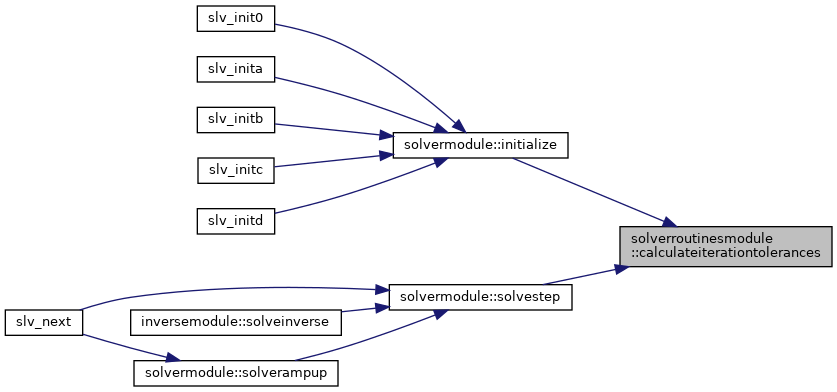
◆ calculateiterationtolerances()
| subroutine solverroutinesmodule::calculateiterationtolerances | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys | ||
| ) |
Calculates all iteration tolerances defined in the system.
- Parameters
-
[in] sam Data for managing system matrix assembly sys System level model data
- Date
- 12 Apr 2003

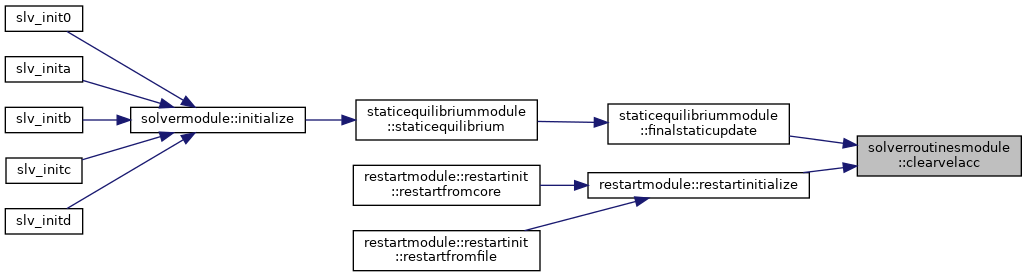
◆ clearvelacc()
| subroutine solverroutinesmodule::clearvelacc | ( | type(triadtype), dimension(:), intent(inout) | triads, |
| type(masterslavejointtype), dimension(:), intent(inout) | joints, | ||
| logical, intent(in) | notify | ||
| ) |
Clears velocity and acceleration variables in the triads and joints.
- Parameters
-
triads All triads in the model joints All joints in the model [in] notify If .true., give message if a non-zero variable is cleared
This subroutine will (re)set the velocity- and accelerations variables in all triads and joints to zero. It mainly is used to nullify potentially non-zero initial conditions in the case of quasi-static load incrementation, in which inertia and damping terms should be zero, such that a possible dynamic restart will be performed from a resting state. Notice that the velocity/accelerations of the generalized DOFs in super- elements do not need to be reset, since those variables are pointers into respective system vectors which are assumed to be initialized separately.
- Date
- 24 Aug 2022
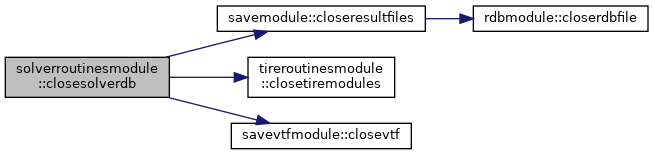
◆ closesolverdb()
| subroutine solverroutinesmodule::closesolverdb | ( | type(mechanismtype), intent(inout) | mech, |
| logical, dimension(:), intent(out) | anyRes, | ||
| integer, intent(out) | ierr | ||
| ) |
Closes all solver data base files before program termination.
- Parameters
-
mech Mechanism components of the model [out] anyRes Indicates whether the result files contain data or not [out] ierr Error flag
- Date
- 30 Jan 2006
◆ iterationaccelerator()
| subroutine solverroutinesmodule::iterationaccelerator | ( | integer, intent(in) | iter, |
| real(dp), dimension(:), intent(in) | res, | ||
| real(dp), dimension(:), intent(inout) | del, | ||
| integer, intent(out) | ierr | ||
| ) |
Accelerates the solution increment in case of line search.
- Parameters
-
[in] iter Iteration counter [in] res Current force residual del Current solution increment [out] ierr Error flag
The solution increment is scaled if the previous and current residual vectors are "almost" tangential, as are previous and current solution vectors (kind-of line search).
- Date
- 29 Mar 2002

◆ printconvergence()
| subroutine solverroutinesmodule::printconvergence | ( | integer, intent(in) | lpu, |
| integer, intent(in) | fileFormat, | ||
| integer(i8), intent(in) | iStep, | ||
| integer, intent(in) | iter, | ||
| logical, intent(in) | tanUpdate, | ||
| real(dp), intent(in) | time, | ||
| real(dp), intent(in) | timeStep, | ||
| real(dp), dimension(:), intent(in) | del, | ||
| real(dp), dimension(:), intent(in) | res, | ||
| type(testsettype), intent(in) | convData, | ||
| type(samtype), intent(in) | sam, | ||
| type(mechanismtype), intent(in) | mech | ||
| ) |
Prints convergence information to the res-file.
- Parameters
-
[in] lpu File unit number for res-file output [in] fileFormat File format option, < 0 : old format (R4.0-compatible), = 0 : new format > 0 : new format and write heading first [in] iStep Time increment counter [in] iter Iteration counter [in] tanUpdate If .true., a new tangent is computed in this iteration [in] time Current simulation time [in] timeStep Time increment size [in] res Force residual [in] del Solution increment [in] convData Iteration norm tolerances and values [in] sam Data for managing system matrix assembly [in] mech Mechanism components of the model
- Date
- 29 Jan 2004

◆ printmassdistribution()
| subroutine solverroutinesmodule::printmassdistribution | ( | type(supeltype), dimension(:), intent(in) | sups, |
| type(masstype), dimension(:), intent(inout) | masses, | ||
| type(tiretype), dimension(:), intent(in) | tires, | ||
| type(userdefeltype), dimension(:), intent(in) | elms, | ||
| real(dp), dimension(:), intent(in) | gravity, | ||
| real(dp), intent(out) | totMass, | ||
| integer, intent(in) | lpu | ||
| ) |
Prints a summary of the mass distribution to the res-file.
- Parameters
-
[in] sups All superelements in the model masses All point masses in the model [in] tires All tires in the model [in] elms All user-defined elements in the model [in] gravity Gravitation vector [out] totMass Total mass of the model [in] lpu File unit number for res-file output
- Date
- 17 Apr 2002
◆ printresults()
| subroutine solverroutinesmodule::printresults | ( | real(dp), intent(in) | time, |
| type(triadtype), dimension(:), intent(in) | triads, | ||
| type(supeltype), dimension(:), intent(in) | sups, | ||
| integer, intent(in) | iprint, | ||
| integer, intent(in) | lpu | ||
| ) |
Prints basic simulation variables to the res-file.
- Parameters
-
[in] time Current simulation time [in] triads All triads in the model [in] sups All superelements in the model [in] iprint Print switch; the higher value the more print is produced [in] lpu File unit number for res-file output
- Date
- 18 Jun 2001

◆ restorelaststep()
| subroutine solverroutinesmodule::restorelaststep | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| type(mechanismtype), intent(inout) | mech | ||
| ) |
Restores all state variables from the last converged time step.
- Parameters
-
[in] sam Data for managing system matrix assembly sys System level model data mech Mechanism components of the model
- Date
- Nov 2008
◆ savestep()
| subroutine solverroutinesmodule::savestep | ( | type(systemtype), intent(in) | sys, |
| type(mechanismtype), intent(inout) | mech, | ||
| type(controltype), intent(in) | ctrl, | ||
| integer, intent(out) | ierr, | ||
| logical, intent(in), optional | checkTimeStep | ||
| ) |
Saves response variables of current time step to file.
- Parameters
-
[in] sys System level model data mech Mechanism components of the model [in] ctrl Control system data [out] ierr Error flag [in] checkTimeStep If present and .false., save the secondary variables for each time step (ignoring the -saveinc2 option).
- Date
- 4 Jun 2002
◆ terminatestep()
| subroutine solverroutinesmodule::terminatestep | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| type(controltype), intent(in) | ctrl, | ||
| logical, intent(in) | linearStatic, | ||
| logical, intent(in) | finalStep, | ||
| integer, intent(out) | ierr | ||
| ) |
Terminates a time step by doing some final calculations.
- Parameters
-
[in] sam Data for managing system matrix assembly sys System level model data mech Mechanism components of the model [in] ctrl Control system data [in] linearStatic If .true., we are doing a linear static analysis [in] finalStep If .true., we have finished the final time step [out] ierr Error flag
This subroutine performs some final calculations on the converged solution state, updates the previous state variables, etc.
- Date
- Sep 2000

◆ updatepreviousstate()
| subroutine solverroutinesmodule::updatepreviousstate | ( | type(samtype), intent(in) | sam, |
| type(systemtype), intent(inout) | sys, | ||
| type(mechanismtype), intent(inout) | mech, | ||
| integer, intent(out) | ierr | ||
| ) |
Updates the previous state variables in the mechanism objects.
- Parameters
-
[in] sam Data for managing system matrix assembly sys System level model data mech Mechanism components of the model [out] ierr Error flag
- Date
- 11 Aug 2023
Variable Documentation
◆ lastime
|
private |
Previous save times.
◆ meqerr
| integer(ik), dimension(:), allocatable, save solverroutinesmodule::meqerr |
All singular equations found.