Initialization of joint objects from the solver input file. More...
Functions/Subroutines | |
| subroutine | readjoints (infp, triads, gCurves, springs, dampers, dmpElms, engines, joints, frictionSets, err) |
| Initializes joint objects with data from the solver input file. More... | |
| subroutine | readhigherpairs (infp, joints, higherPairs, err) |
| Initializes higher pairs with data from the solver input file. More... | |
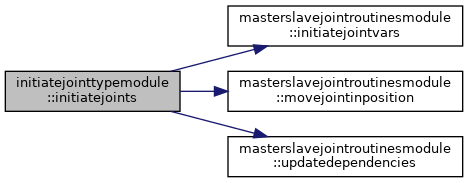
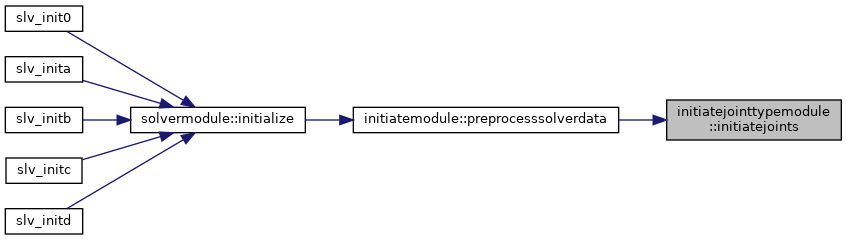
| subroutine | initiatejoints (joints, forces, motions, mpreac, RF, ierr) |
| Computes constraint coefficient and joint variable start values. More... | |
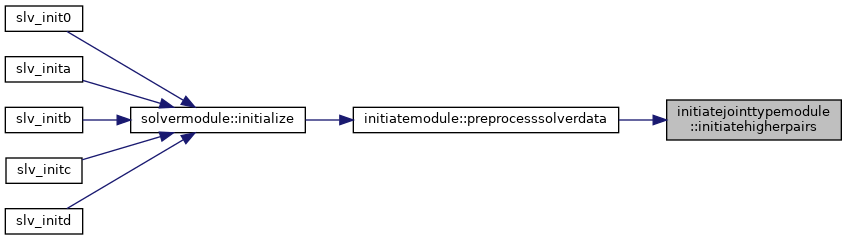
| subroutine | initiatehigherpairs (higherPairs) |
| Computes initial values for joint variables via higher pairs. More... | |
Detailed Description
Initialization of joint objects from the solver input file.
Function/Subroutine Documentation
◆ initiatehigherpairs()
| subroutine initiatejointtypemodule::initiatehigherpairs | ( | type(higherpairtype), dimension(:), pointer | higherPairs | ) |
Computes initial values for joint variables via higher pairs.
- Parameters
-
higherPairs Array of all higher pair objects in the model
- Date
- 2 Oct 2018
Here is the caller graph for this function:
◆ initiatejoints()
| subroutine initiatejointtypemodule::initiatejoints | ( | type(masterslavejointtype), dimension(:), intent(inout) | joints, |
| type(forcetype), dimension(:), intent(in), target | forces, | ||
| type(motiontype), dimension(:), intent(in) | motions, | ||
| integer, dimension(:), pointer | mpreac, | ||
| real(dp), dimension(:), intent(in), target | RF, | ||
| integer, intent(out) | ierr | ||
| ) |
Computes constraint coefficient and joint variable start values.
- Parameters
-
joints Array of all joint objects in the model [in] forces Array of all external point load objects in the model [in] motions Array of all prescribed motion objects in the model [out] mpreac Matrix of pointers to reaction forces [in] RF System reaction forces associated with constrained DOFs [out] ierr Error flag
- Date
- 24 Oct 2002
Here is the call graph for this function:
Here is the caller graph for this function:
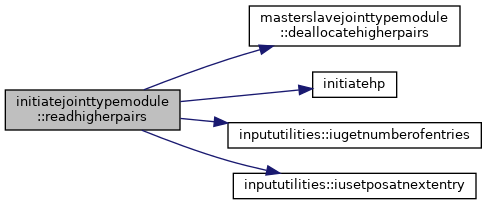
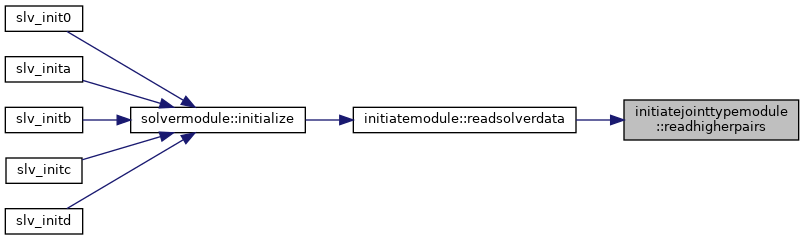
◆ readhigherpairs()
| subroutine initiatejointtypemodule::readhigherpairs | ( | integer, intent(in) | infp, |
| type(masterslavejointtype), dimension(:), intent(in) | joints, | ||
| type(higherpairtype), dimension(:), pointer | higherPairs, | ||
| integer, intent(out) | err | ||
| ) |
Initializes higher pairs with data from the solver input file.
- Parameters
-
[in] infp File unit number for the solver input file [in] joints Array of all joint objects in the model higherPairs Array of all higher pair objects in the model [out] err Error flag
- Date
- 7 Dec 2000
Here is the call graph for this function:
Here is the caller graph for this function:
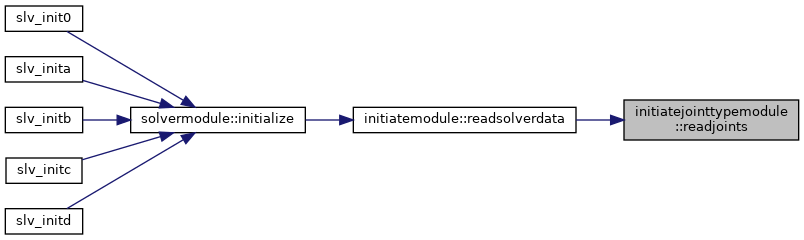
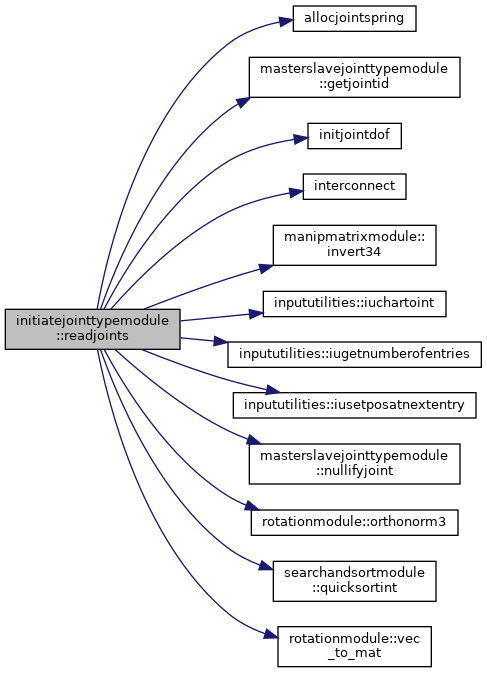
◆ readjoints()
| subroutine initiatejointtypemodule::readjoints | ( | integer, intent(in) | infp, |
| type(triadtype), dimension(:), intent(in) | triads, | ||
| type(glidercurvetype), dimension(:), intent(in) | gCurves, | ||
| type(springbasetype), dimension(:), intent(in) | springs, | ||
| type(damperbasetype), dimension(:), intent(in) | dampers, | ||
| type(dampertype), dimension(:), intent(inout) | dmpElms, | ||
| type(enginetype), dimension(:), intent(in) | engines, | ||
| type(masterslavejointtype), dimension(:), pointer | joints, | ||
| type(frictionparametertype), dimension(:), intent(in) | frictionSets, | ||
| integer, intent(out) | err | ||
| ) |
Initializes joint objects with data from the solver input file.
- Parameters
-
[in] infp File unit number for the solver input file [in] triads Array of all triads in the model [in] gCurves Array of all glider curve objects in the model [in] springs Array of all base spring objects in the model [in] dampers Array of all base damper objects in the model [in] dmpElms Array of all damper elements in the model [in] engines Array of all engines in the model joints Array of all joint objects in the model [in] frictionSets Array of all friction parameter sets in the model [out] err Error flag
- Date
- Nov 1998
- Date
- Oct 2000
- Date
- Jul 2002
Here is the call graph for this function:
Here is the caller graph for this function: